Понятие о базах и базировании
Задачи определения положения детали в машине и в процессе её контроля, заготовки при обработке на станке или их базирование занимают центральное место в процессе создания машины. От того, как они решены, во многом зависит качество деталей и машины в целом.
Вопросам базирования и в нашей стране, и за рубежом уделено большое внимание и посвящено немало специальных научных трудов. Большой вклад в разработку теории базирования внесен учеными Б.С. Балакшиным, А.И. Кашириным, В.М. Кованом, А.А. Маталиным, А.П. Соколовским, В.П. Фираго и многими другими.
Теорию базирования разрабатывали в двух направлениях. Первое из них преследовало цель обобщения опыта машиностроения и классификации баз в соответствии с терминологией, порожденной практикой. Результатом этого направления явилась чрезвычайно обширная и недостаточно строгая терминология, пользование которой было сопряжено с немалыми трудностями. Основу другого научного направления составила теоретическая механика, ее раздел об определении положения твердого тела в пространстве. Основоположником этого направления был Б.С. Балакшин, разработавший в 40-х годах теорию базирования, положенную в основу ГОСТ 21495–76 "Базирование и базы в машиностроении", созданного под его руководством.
Теоретическая механика рассматривает два состояния твердого тела: покоя и движения. Понятия "покоя" и "движения" являются относительными и имеют смысл только тогда, когда указана система, отсчета.
Требуемое положение или движение твердого тела относительно выбранной системы отсчета достигается наложением геометрических или кинематических связей.
Связями в теоретической механике называют условия, которые налагают ограничения либо только на положение, либо также и на скорость точек тела. В первом случае связь называют геометрической, во втором – кинематической.
Связи обычно осуществляются в виде различных тел, стесняющих свободу движения данного тела. Эффект действия связей такой же, как и действие сил, вследствие чего действие связей можно заменить соответствующими силами, называемыми реакциями связей.
Независимые перемещения, которые может иметь тело, называют степенями свободы. Абсолютно твердое тело имеет шесть степеней свободы. Для того чтобы придать телу необходимое положение и состояние покоя относительно выбранной системы отсчета, его надо лишить шести степеней свободы, наложив на него шесть двусторонних геометрических связей.
Если избрать в качестве системы отсчета прямоугольную систему координат XYZ (рисунок 1), то при наложении шести геометрических связей тело лишится трех перемещений вдоль осей ОХ, ОУ и OZ и трёх поворотов вокруг осей, параллельных им, оставаясь неподвижным в системе XYZ.
Аналитическое определение требуемого положения абсолютно твердого тела сводится к заданию значений шести независимых параметров, однозначно характеризующих его положение. Сделано это может быть различными способами.
Первый - с телом связывают неизменно прямоугольную систему координат O1XlYlZl, называемую подвижной. Её положение в системе OXYZ характеризуют координаты х, у, z начала Ol и три угла Эйлера: θ– угол нутации, ψ – угол прецессии и ϕ – угол собственного вращения системы O1XlYlZl. По значениям этих параметров судят о положении как системы O1XlYlZl ,так и самого тела относительно системы OXYZ, являющейся системой отсчёта.
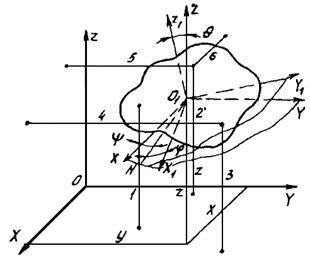
Рисунок 1- Геометрические связи и координаты, определяющиеположение твёрдого тела в системе OXYZ
Второй способ - на плоскости O1XlYlZl выбирают три точки, не лежащие на прямой линии, на O1XlYlZl – две, на O1XlYlZl – одну и задают значения их координат (рисунок 2). Поскольку параметры х, у, z, θ, ψ, ϕ аналитически связаны со значениями координат этих шести точек, то такой способ характеристики положения тела в системе OXYZ равнозначен первому способу.
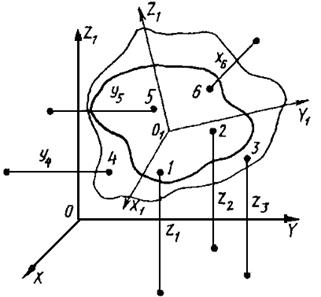
Рисунок 2 -. Определение положения твердого тела с использованием координат шести точек, размещенных на плоскостях подвижной системы O1XlYlZl
Тело находится в неподвижном состоянии, если выполняются условия:
- сумма всех активных сил, действующих на тело, и реакций равна нулю;
- в начальный момент скорость тела также равна нулю.
Если в избранной системе отсчёта требуется создать движение тела с определенной скоростью в одном или нескольких направлениях, то соответствующее число геометрических связей должно быть заменено таким же числом кинематических связей.
Исходя из вышесказанного, можно дать определение базированию.
Под базированием в машиностроении понимают придание заготовке или изделию требуемого положения относительно выбранной системы координат.
Под изделием подразумевают деталь, сборочную единицу, а также режущий и измерительный инструмент, приспособления, приборы и другие объекты, допускающие их представление как абсолютно твердых тел.
На рисунке 3 приведены примеры различных объектов базирования в зависимости от задач базирования.
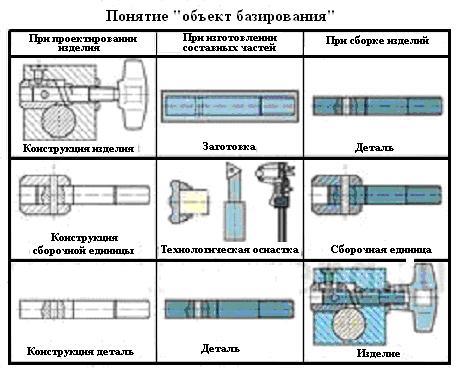
Рисунок 3 – Объекты базирования
Придание детали требуемого положения в избранной системе координат осуществляется в реальной ситуации путём соприкосновения её поверхностей с поверхностями детали или деталей, на которые её устанавливают или с которыми её соединяют. Фиксация достигнутого положения и постоянство контакта обеспечиваются силами, в числе которых первым проявляется действие массы самой детали и сил трения.
Реальные детали машин ограничены поверхностями, имеющими отклонения формы от своего идеального прототипа. Поэтому базируемая деталь может контактировать с деталями, определяющими её положение лишь на отдельных элементарных площадках, условно считаемых точками контакта!!!!.
В общем случае при сопряжении детали по трём поверхностям с деталями, базирующими её, возникает шесть точек контакта. При этом на контактирующих поверхностях точки контакта распределяются определенным образом.
На рисунке 4 показана деталь 1 - прямоугольный параллелепипед, установленная в "угол", образованный базирующими деталями 2. Шесть точек контакта распределились на поверхностях детали (соответственно и на поверхностях деталей, на которые она установлена) следующим образом: три точки контакта на нижней поверхности детали, две на боковой поверхности наибольшей протяженности и одна на торцовой поверхности.
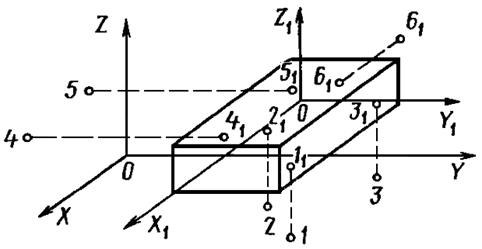
Рисунок 4- Базирование детали в координатной системеХYZ
Из рассмотренного примера видно, что базирование детали было осуществлено с помощью нескольких её поверхностей – баз.
База -поверхность или выполняющее ту же функцию сочетание поверхностей, ось, точка, принадлежащая заготовке или изделию и используемая для базирования.
На рисунке 5 приведены примеры баз.
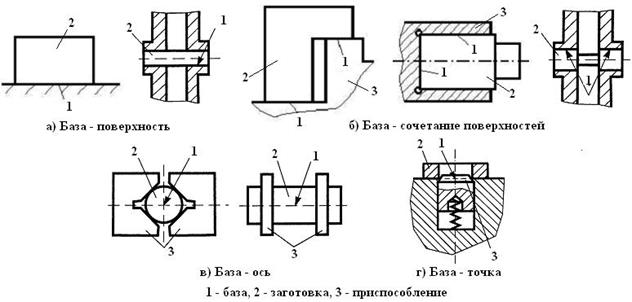
Рисунок 5 –Примеры баз
При базировании призмы (рисунок 4) у присоединяемой детали 1 базами являются поверхности, на которых построены координатные плоскостиХ1О1Y1 и Х1O1Z1и Y1O1Z1,а базами деталей 2 поверхности, на которых построены плоскости ХОY и ХOZи YOZ.Тогда координаты 11 - 1, 21 – 2, 31 - 3, 41 - 4, 51 - 5, 61 - 6 определят положение детали 1. В результате совмещения баз детали 1 с базами деталей 2 координаты превратятся в шесть опорных точек (рисунок 6).
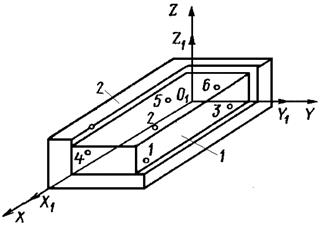
Рисунок 6 - Базирование детали при совмещении координатных систем
Таким образом, получим правило шести точек, согласно которому для определения положения детали, рассматриваемой как абсолютно твердое тело, относительно другой детали (других деталей) необходимо и достаточно иметь шесть опорных точек, где каждая опорная точка лишает деталь одной степени свободы.
Опорная точка – это символ одной из связей заготовки или изделия с выбранной системой координат. Условное изображение опорной точки по ГОСТ 21495-93 показано на рисунке 7.
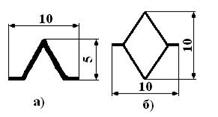
Рисунок 7 -Условное изображение опорной точки
а –вид спереди и сбоку; б –вид сверху
Совокупность трёх баз, образующих систему координат заготовки или изделия, называют комплектом баз. Комплект баз может быть образован сочетанием поверхностей разных размеров и конструктивных форм (плоских, цилиндрических, конических и др.), и распределение шести связей между ними может быть различным.
Схему расположения опорных точек на базах заготовки, детали или изделия называют схемой базирования.
Правила изображения опорных точек:
1. Все опорные точки на схеме базирования нумеруют порядковыми номерами, начиная с базы, на которой располагают наибольшее число опорных точек.
2. Число проекций детали на схеме базирования должно быть достаточным для чёткого представления о размещении опорных точек.
3. При наложении в какой-либо проекции одной опорной точки на другую, изображают одну точку и около неё проставляют номера совмещенных точек.
На рисунке 8 показаны схемы базирования призматической и цилиндрической деталей.
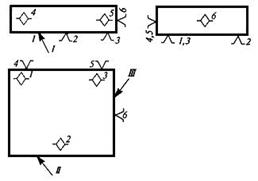
Рисунок 8 – Схема базирования
Классификация баз
Базы классифицируют по трём признакам:
- по назначению,
- по лишаемым степеням свободы,
- по характеру проявления.
Дата добавления: 2020-10-01; просмотров: 3464;
Поиск по сайту
Узнать еще
- B.I. Понятие культуры
- I. Понятие о методах воспитания.
- I. Понятие о принципах обучения, их взаимосвязь.
- II. Общее понятие о процессе познания и процессе обучения.
- III.IX. Понятие о стратиграфических и петрографических горизонтах
- IV. Понятие “стохастические и нестохастические” эффекты облучения
- IV.4. Понятие устойчивого развития
- А) Понятие о комплексных числах

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
