МЕТОДЫ И СРЕДСТВА ОПТИМИЗАЦИИ ЭНЕРГОПОТРЕБЛЕНИЯ В НЕРЕГУЛИРУЕМОМ ПРОМЫШЛЕННОМ ЭЛЕКТРОПРИВОДЕ ПЕРЕМЕННОГО ТОКА.
Электродвигатели являются наиболее распространенными электропотребителями промышленных предприятий. На них приходится около 80 % потребления электроэнергии. Большую долю установленной мощности составляют асинхронные электродвигатели.
Необходимо проверять соответствие мощности привода (электродвигателя) потребляемой мощности нагрузки, т.к. завышение мощности электродвигателя приводит к снижению КПД и соsφ . С уменьшением степени загрузки двигателя возрастает доля потребляемой реактивной мощности, на создание магнитного поля системы по сравнению с активной мощностью и снижается величина соsφ. Капитальные затраты на замену одного двигателя другим двигателем с соответствующей номинальной мощностью целесообразны при его загрузке менее 45 %; при загрузке 45-75 % для замены требуется проводить экономическую оценку мероприятия; при загрузке более 70 % замена нецелесообразна.
Эффективность зависит от типа, скорости, времени нагрузки двигателя, а также от его мощности:
Для двигателей мощностью 5 кВт при 100 % нагрузке КПД = 80 %, для двигателей 150 кВт КПД = 90%.
Для двигателей мощностью 5 кВт при 50 % нагрузке КПД = 55 %, для двигателей мощностью 150 кВт КПД равен 65 %.
40 80
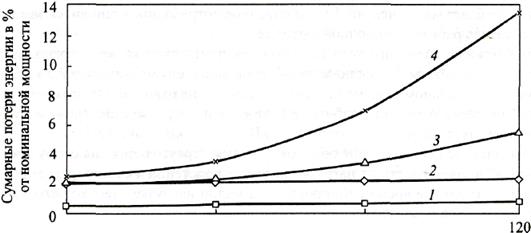
Степень загрузки электродвигателя, %
Рис. 1. Сложение составляющих потерь мощности в электродвигателях: 1 — потери на трение и сопротивление; 2 — с учетом потерь в стали; 3 — с учетом потерь на рассеивание; 4 — с учетом активных потерь в меди — суммарные потери
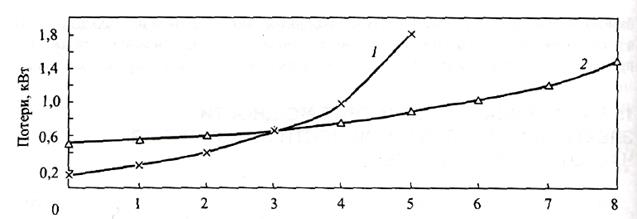
Выходная мощность, кВт
Рис. 2. Влияние на потери переключения из "треугольника" в "звезду" стандартного двигателя мощностью 7,5 кВт: 1 — соединение "звездой"; 2 — соединение "треугольником"
При снижении нагрузки двигателя до 50 % и менее его эффективность начинает быстро падать по причине того, что потери в железе начинают преобладать.
Суммарные потери в электродвигателе имеют четыре основных составляющих (см. рис. 1):
1.Потери в стали (потери намагничивания), связанные с напряжением питания, по
стоянны для каждого двигателя и не зависят от нагрузки.
2.Активные потери в меди I2R, пропорциональные квадрату тока нагрузки.
3.Потери на трение, постоянные для данной частоты вращения и не зависящие от нагрузки,
4.Добавочные потери от рассеивания — зависят от нагрузки,
Снижение регулятором напряжения питания электродвигателя позволяет уменьшить магнитное поле в стали, которое избыточно для рассматриваемого режима нагрузки, снизить потери в стали и уменьшить их долю в общей потребляемой мощности, т.е. повысить КПД двигателя. Сам регулятор напряжения (обычно в тиристорном исполнении) потребляет мало энергии. Его собственное потребление становится заметным, когда двигатель работает на полной нагрузке.
Часто в режиме холостого хода потребляется почти столько же энергии, сколько необходимо для работы. Переключение обмоток двигателя мощностью 7,5 кВт, работающим в номинальном режиме (линейное напряжение равно 380 В) по схеме "треугольник", на схему звезды при работе на пониженной нагрузке 1 кВт (режим холостого хода) позволяет уменьшить потери с 0,5 кВт до 0,25 кВт
(рис. 2).
Автоматическое переключение обмоток со схемы "треугольник" на схему соединения "звезда" в зависимости от нагрузки является простейшей схемой регулирования двигателя, длительное время работающего на малой нагрузке. Необходимо избегать работы двигателя в режиме холостого хода.
Дата добавления: 2016-07-11; просмотров: 2541;
Поиск по сайту
Узнать еще
- B. Медленно действующие противоревматоидные средства
- I. История открытия и методы исследования вирусов
- I. Решение логических задач средствами алгебры логики
- I. Способы представления переменного синусоидального тока и напряжения.
- II. Категории и методы политологии.
- III. Методы искусственной физико-химической детоксикации.
- RLC-контур с параллельным соединением элементов в цепи переменного тока.
- А) Антихолинэстеразные средства обратимого действия

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
