Универсальные переключатели
Переключатели можно разделить на две группы: с поворотными подвижными контактами серии МК, ПМО и кулачковые УП5300, ПКУ.
Универсальные переключатели выпускаются в нормальном исполнении - серии УП5300; водозащищенном - серии УП5400; взры-возащищенном серии - УП58007. Их различают по числу секций, числу фиксированных положений и углу поворота рукоятки, ее форме и другим признакам.
Число секций может быть 2, 4, 6, 8, 10, 12, 14, 16.
В обозначении каждого переключателя указывают сокращенное название, условный номер данной конструкции, номер, указывающий число секций, тип фиксатора и номер диаграммы переключателя по каталогу. Например, обозначение УП5314-Н20 расшифровывается так: У - универсальный, П - переключатель, 5 - нерегулируемый командоаппарат, 3 - безреечная конструкция, 14 - число секций, Н -тип фиксатора, 20 - номер диаграммы по каталогу.
|
| а) |
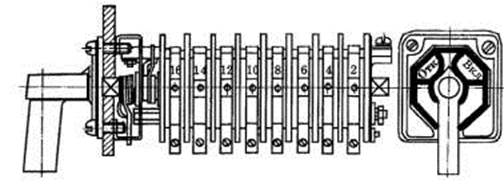
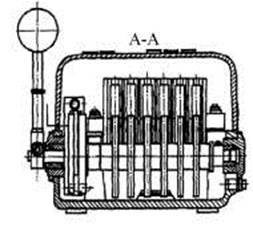
Основной частью переключателя УП5300 являются стянутые шпильками рабочие секции (рис. 1.6, б). Через все секции проходит центральный валик, на одном конце которого находится пластмассовая рукоятка. Для крепления переключателя на панели в его передней стенке имеются три выступа с отверстиями под установочные винты. Коммутация электрических цепей осуществляется расположенными в секциях контактами.
б)
Рис. 1.6. Универсальный переключатель УП5300: а — общий вид; б — конструкция рабочей секции
Контроллеры
Контроллеры - это многоцепные электрические аппараты с ручным или ножным приводом для непосредственной коммутации силовых цепей двигателей постоянного тока до 440 В и переменного тока до 500 В.
По своей конструкции они разделяются на кулачковые, барабанные, плоские и магнитные. Кулачковые контроллеры могут быть двух типов: силовые и магнитные.
В управлении электродвигателями крановых и других передвижных механизмов используются кулачковые и магнитные контроллеры. У кулачковых контроллеров размыкание и замыкание контактов обеспечивается смонтированными на барабане кулачками, поворот которых осуществляется с помощью рукоятки маховика или педали и могут коммутировать от 2 до 24 электрических цепей.
|
|
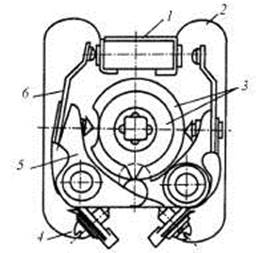
Рис. 1.7. Кулачковый контроллер:
1 - неподвижные контакты; 2 - контакто держатель;
3 - подвижные контакты; 4 - пружина; 5 - рычаг;
6 - переключающая шайба; 7 - фиксатор
Кулачковые контроллеры разделяются по количеству коммутируемых цепей, виду привода, диаграммам замыкания контактов. Внешний вид и конструкция кулачкового контроллера показана на рис. 1.7. Устройство одного контактного элемента кулачкового контроллера представлено на рис. 1.8.
На валике 1 насажены переключающие шайбы 2 с кулачками 3 и 7. При вращении валика 1 кулачок 7 дойдет до ролика 9 и, нажимая на него, повернет рычаг 8 с подвижными контактами 6, которые замкнут неподвижные контакты 5 на плате 4. При повороте рычага 8
под действием пружины 13 защелка 12 входит в вырез рычага и удерживает его после прохода кулачка 7. Быстрое отключение контроллера произойдет под действием пружины 10, когда кулачок 3, нажимая на ролик 11, выведет защелку 12 из выреза рычага 8. Расстановка и число включающих и отключающих кулачков позволяет получить разные комбинации работы контактов контроллера.
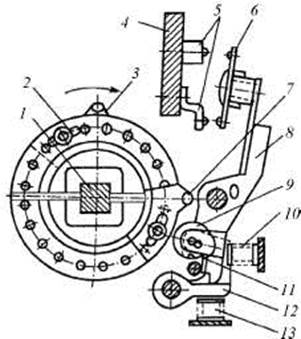
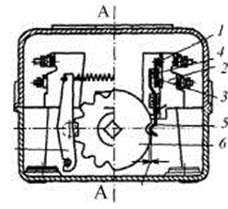
Рис. 1.8. Контактный элемент кулачкового контроллера:
1 - валик; 2 - переключающая шайба; 3 - кулачок; 4 - плата;
5 - неподвижные контакты; 6 - подвижные контакты; 7 - кулачок;
8 - поворотный рычаг; 9 - ролик; 10 - пружина; 11 - ролик;
12 - защелка; 13 - пружина
Магнитные контроллеры состоят из командоконтроллера и силовых электромагнитных аппаратов - контакторов. Командоконтрол-лер с помощью своих контактов производит включение или отключение напряжения на катушках контакторов, которые своими силовыми контактами коммутируют цепи электродвигателей. Это позволяет повысить степень автоматизации при управлении электроприводами передвижных механизмов.
Для управления двигателями механизмов передвижения используются магнитные контроллеры трех серий П, Т и К. У контроллеров серии П силовые цепи и цепи управления получают питание от сети постоянного тока, у котроллеров серии Т - от сети переменного тока.
В контроллерах серии К применяются аппараты управления постоянного тока, которые более надежны в эксплуатации и допускают большую частоту включений, чем контакторы и реле переменного тока.
Для управления электроприводами подъема применяются несимметричные магнитные контроллеры серий ПС, ТС и КС, которые позволяют получить от двигателей низкие посадочные скорости при спуске грузов. Буква А в обозначении типа контроллера означает, что управление двигателем автоматизировано в функции времени или ЭДС, например ПСА, ТСА.
Магнитные контроллеры используются для приводов средней и большой мощности до 150 кВт с высокой частотой включений.
|
| FU2 |
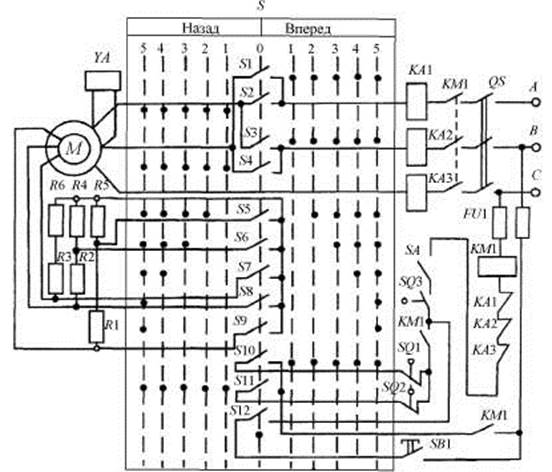
Рис. 1.9. Схема контроллерного управления асинхронным электродвигателем с фазным ротором
Типовая схема контроллерного управления асинхронным двигателем с фазным ротором показана на рис. 1.9. Управление механизмом передвижения крана осуществляется с помощью кулачкового контроллера S. Контроллер имеет 11 фиксированных положений: одно нулевое 0, пять положений для передвижения вперед и пять поло-
жений для передвижения назад. Контакты S1-S12 кулачкового контроллера замыкаются в положениях, отмеченных точками. Например, контакт S1 замыкается в положениях 1-5 на движение вперед, а S12 -только в нулевом положении. С помощью контактов S1-S4 осуществляется реверсирование двигателя М изменением чередования фаз. Контакты S5-S9 вводят дополнительные резисторы в цепь ротора, с помощью которых регулируется частота вращения двигателя М. Контакты S10-S12 работают совместно с элементами пуска и защиты. Чтобы включить электродвигатель контроллер выводится в нулевое положение, при этом замкнется контакт S12. Нажатием на кнопку SB1 катушка контактора KМ1 получит питание по цепи: контакты нулевой защиты S12 - контакт SQ3 конечного выключателя люка выхода на мост - контакт SA1 аварийного отключения - контакты KА1, KА2, KА3, осуществляющие максимальную токовую защиту. Контактор включается и дальнейшая его работа будет осуществляться с помощью вспомогательного контакта KМ1 через контакты конечных выключателей SQ1 и SQ2 ограничения движения крана в конечных точках - контакты контроллера S10 или S11.
После включения контактора Щ оператор, поворачивая рукоятку контроллера, подает питание на обмотку статора контактами S1-S4 и одновременно последовательно выводит секции резисторов R1—R6, включенные в цепь ротора двигателя М, тем самым, изменяя частоту вращения ротора двигателя.
Дата добавления: 2016-06-29; просмотров: 5398;
Поиск по сайту
Узнать еще
- Аппараты для коммутации цепей управления: кнопки, выключатели и переключатели
- Комбинированные и универсальные станки для обработки дерева
- Одноэтажные, двухэтажные, многоэтажные и универсальные промышленные здания
- Операционные системы универсальные и специального назначения.
- Оптические универсальные аналоговые стереоприборы
- Пакетные выключатели и переключатели
- Переключатели кулачковые двухпозиционные
- Переключатели управления

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
