В импедансных дефектоскопах механические импедансы оценивают с поверхности изделия в зонах возбуждения в нем изгибных колебаний звуковых или низких ультразвуковых частот.
Изменения механического импеданса преобразуют в соответствующие им изменения электрического сигнала который обрабатывают в электронном блоке дефектоскопа и представляют на индикаторе или используют для управления исполнительными механизмами.
В отличие от широко применяемого в ультразвуковой дефектоскопии понятия характеристического импеданса или удельного волнового сопротивления  (
(  - плотность среды, с - скорость звука в ней), характеризующего среду, в которой распространяются упругие волны, механическим импедансом Z называется комплексное отношение силы, действующей на поверхности (или в точке) механической системы к средней колебательной скорости на этой поверхности (или в точке) в направлении силы. Таким образом, механический импеданс является характеристикой конструкции, а не среды. Понятие механического импеданса относится к линейным системам, находящимся в состоянии стационарных гармонических колебаний.
- плотность среды, с - скорость звука в ней), характеризующего среду, в которой распространяются упругие волны, механическим импедансом Z называется комплексное отношение силы, действующей на поверхности (или в точке) механической системы к средней колебательной скорости на этой поверхности (или в точке) в направлении силы. Таким образом, механический импеданс является характеристикой конструкции, а не среды. Понятие механического импеданса относится к линейным системам, находящимся в состоянии стационарных гармонических колебаний.
Механический импеданс как комплексная величина представляется в виде Z=R+jX, где R - активная, а X - реактивная составляющие,  - модуль, или в виде
- модуль, или в виде  , где
, где  ;
; 
Инерционную реактивную составляющую принято считать положительной, упругую - отрицательной.
Механический импеданс многослойной конструкции в зоне приложения возмущающей силы определяется всеми элементами этой конструкции, соединенными в одну механическую систему. Когда все слои конструкции связаны (например, склеены) между собой, она колеблется как единое целое и модуль|Z1|механического импеданса имеет максимальное значение. Если в изделии имеется дефект в виде нарушения соединения между слоями, то жесткость отделенного им участка изделия оказывается меньше жесткости в зонах доброкачественного соединения слоев. Поэтому модуль|Z2| механического импеданса изделия в дефектной зоне будет меньше, чем|Z1|.В общем случае в зоне дефекта меняется также отношение (а иногда и характер (знак) реактивной составляющей X). Таким образом, дефект соединения может быть обнаружен по изменению механического импеданса изделия. Устройством, чувствительным к изменению механического импеданса контролируемого объекта, служит преобразователь дефектоскопа. В импедансных дефектоскопах применяют совмещенные, раздельно-совмещенные и бесконтактные преобразователи. Первые два из них используют пьезоэлектрическое возбуждение и прием упругих колебаний. В бесконтактных преобразователях колебания возбуждаются электромагнитно-акустическим ЭМА) способом, и принимаются микрофоном.
(а иногда и характер (знак) реактивной составляющей X). Таким образом, дефект соединения может быть обнаружен по изменению механического импеданса изделия. Устройством, чувствительным к изменению механического импеданса контролируемого объекта, служит преобразователь дефектоскопа. В импедансных дефектоскопах применяют совмещенные, раздельно-совмещенные и бесконтактные преобразователи. Первые два из них используют пьезоэлектрическое возбуждение и прием упругих колебаний. В бесконтактных преобразователях колебания возбуждаются электромагнитно-акустическим ЭМА) способом, и принимаются микрофоном.
Преобразователь (рис.5) представляет собой стержень (5), на торцах которого размещены возбуждающий колебания (2) и измерительный (6) пьезоэлементы. Между объектом контроля (11) и пьезоэлементом (6) находится контактный наконечник (9) со сферической поверхностью. Пьезоэлемент (2) соединен с генератором (4) синусоидального электрического напряжения, пьезоэлемент (6) – с усилителем (10). Масса (3) повышает мощность излучения в стержень (5). Генератор и усилитель соединены с блоком (7) обработки сигнала с индикатором (8) на выходе. Блок (7) управляет сигнальной лампочкой (1) и самописцем (на рисунке не показан), регистрирующем дефекты при использовании прибора в системах механизированного контроля.
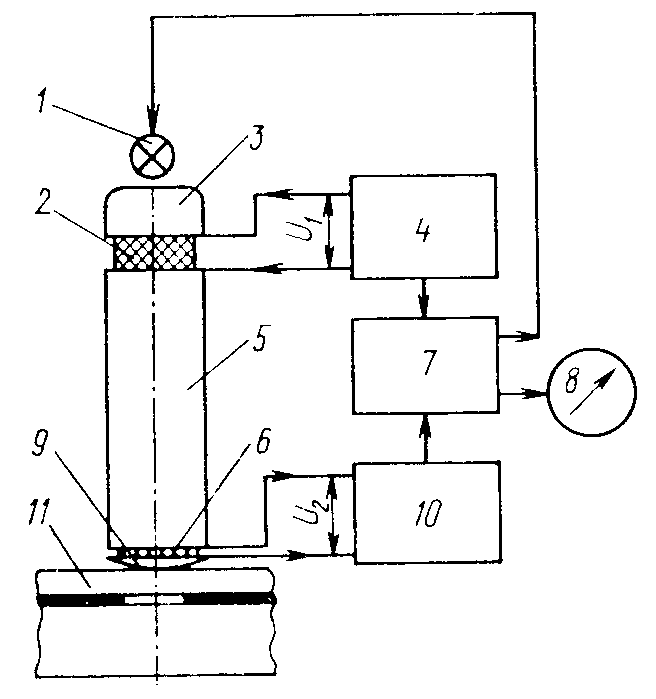
Рис. 5. Структурная схема импедансного дефектоскопа
Совмещенный преобразователь контактирует с контролируемым объемом в одной зоне, через которую происходит как возбуждение упругих колебаний, так и оценка механического импеданса.
Раздельно - совмещенный преобразователь имеет две зоны контакта с контролируемым объектом. Через однуиз них происходит возбуждение, через другую - прием упругих колебаний. Для излучения и приема служат разные вибраторы, размещенные в общем корпусе и акустически изолированные друг от друга.
Совмещенные преобразователи используются также в импульсных импедансных дефектоскопах (а. с. 1226296 СССР). В этом случае в системе преобразователь - контролируемый объект возбуждают импульсы свободно затухающих упругих колебаний. Признаком дефекта служит изменение амплитуды, несущей частоты и фазы выходного сигнала преобразователя. Совмещенные преобразователи импульсных дефектоскопов принципиально не отличаются от описанного преобразователя.
Преимущество совмещенного преобразователя - контакт с изделием св одной, малой по площади зоне, недостаток - относительно небольшая глубина залегания выявляемых дефектов. Этот недостаток связан с влиянием упругого сопротивления  (Кк – контактная гибкость) зоны контакта преобразователя с изделием.
(Кк – контактная гибкость) зоны контакта преобразователя с изделием.
Импеданс Zк соединен с импедансом Zн изделия цепочкой, что на эквивалентной схеме соответствует параллельному соединению этих элементов. Поэтому импеданс общей механической нагрузки преобразователя
 .
.
С увеличением глубины залегания дефекта величина|Zн| быстро увеличивается. Когда она становится много больше|Zк|, импеданс изделия практически перестает влиять на Z0 и дефектыне выявляются .
При работе совмещенными преобразователями используют непрерывные колебания с частотой: 200 - 8 кГц, а также импульсы с несущей частотой до 6 кГц.
Раздельно-совмещенные (РС) преобразователи могут работать в . непрерывном и импульсном режимах, причем последний получил преимущественное распространение. Обобщенная структурная схема импульсного импедансного дефектоскопа с РС - преобразователем показана на рис. 6. Идентичные пьезоэлектрические вибраторы (1) и (9) со сферическими контактными наконечниками размещены в общем корпусе преобразователя и акустически изолированы друг от друга.
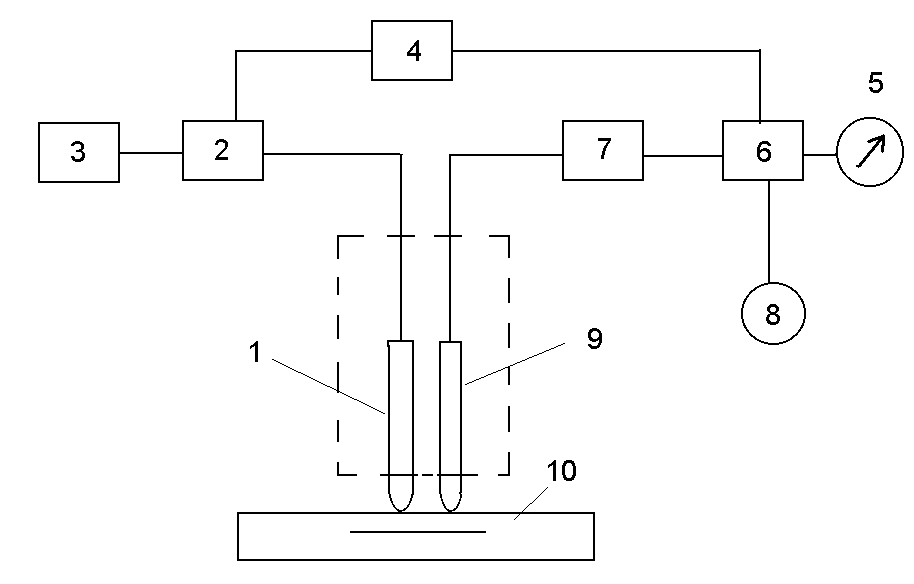
Рис. 6. Структурная схема импедансного дефектоскопа с раздельно-совмещенным преобразователем.
В излучающем вибраторе (1) с помощью управляемого синхронизатором (3) генератора (2)возбуждаются продольные упругие колебания, несущая частота которых соответствует основной частоте нагруженного вибратора. Вибратор (1) возбуждает в контролируемом изделии(10)изгибные волны, распространяющиеся во все стороны. Эти волны принимаются приемным вибратором (9) и преобразуются им в электрические сигналы. После усиления усилителем (7) эти сигналы поступают в блок обработки информации (6) соединенный с индикатором (5) и автоматическим сигнализатором дефектов (8).Последний управляет работой расположенной в преобразователе теле сигнальной лампы, самописца или исполнительно механизма. При использовании амплитудно-фазовой обработки сигнал с генератора (2) через блок (4) управления фазой поступает на второй вход блока (6). Изменение в зонах дефектов меняет амплитуду и фазу принятых сигналов, что регистрируется дефектоскопом .
Дефекты выявляются лишь при одновременном нахождении излучающего и приемного вибраторов в дефектных зонах. Поэтому базу преобразователя (расстояние между точками касания вибраторов с изделиями) выбирают как можно меньшей.
Преимуществом РС - преобразователей перед совмещенными является большая глубина залегания обнаруживаемых дефектов (до 15-20мм в пластиках), что объясняется другим механизмом влияния контактной гибкости В отличие от совмещенных, РС - преобразователи эффективны и при  . По чувствительности к мелким, неглубоко залегающим дефектам, РС - преобразователи уступают совмещенным. Это связано с невозможностью выявления дефектов, протяженность которых меньше базы преобразователя.
. По чувствительности к мелким, неглубоко залегающим дефектам, РС - преобразователи уступают совмещенным. Это связано с невозможностью выявления дефектов, протяженность которых меньше базы преобразователя.
Импедансный дефектоскоп с бесконтактным преобразователем содержит генератор, питающий обмотки ЭМА - излучателя, усилитель принятых микрофоном сигналов и блок обработки информации с индикатором и выходами на исполнительные устройства.
Бесконтактный ЭМА - преобразователь возбуждает упругие колебания через зазор толщиной порядка десятых долей миллиметра. Так как ЭМА способ позволяет возбуждать упругие колебания только в проводящих средах, область применения этого преобразователя ограничена конструкциями с металлическими обшивками.
Дата добавления: 2016-06-22; просмотров: 2827;
Поиск по сайту
Узнать еще
- Base-5 или толстый Ethenet
- CIH — газораспределительный механизм с распределительным валом в головке блока цилиндров
- Cемейство Мотыльковые (Fabaceae, или Leguminosae)
- Cравнительная характеристика усилителей на БТ
- D-технология построения чертежа. Типовые объемные тела: призма, цилиндр, конус, сфера, тор, клин. Построение тел выдавливанием и вращением. Разрезы, сечения.
- I. Обработка поверхности изделий.
- I. Подготовка поверхности.
- I. РАПИРА С ПОПЕРЕЧНЫМ СТЕРЖНЕМ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
