Временные характеристики динамических звеньев и систем и способы их получения
Рассмотренные выше формы моделей динамических звеньев и систем являются общими, то есть содержат всю информацию о динамических свойствах моделируемого объекта, необходимую для решения задач теории управления. В то же время эти формы нельзя признать наглядными с точки зрения понимания и анализа отдельных свойств. Эту роль выполняют временные и частотные характеристики звеньев и систем, получаемые на основе моделей в общих формах.
В теории управления рассматриваются две временные характеристики – переходная и весовая.
Переходная характеристика (переходная функция) – это реакция звена или системы на входной сигнал в виде единичной ступенчатой функции (рисунок 40).
Рассмотрим основные способы (методы) получения переходной характеристики.
Классический метод – путем решения дифференциального уравнения звена или системы:

при нулевых начальных условиях.
В соответствии с определением переходной характеристики замене абстрактного входного сигнала x1 на единичную ступенчатую функцию будет соответствовать замена x2 на переходную характеристику (функцию):

или
 ,
,
где  .
.
Такая запись означает необходимость решения дифференциального уравнения
на интервале времени  с пересчетом заданных начальных условий «слева от нуля» в начальные условия «справа от нуля» с использованием коэффициентов при производных в правой части уравнения.
с пересчетом заданных начальных условий «слева от нуля» в начальные условия «справа от нуля» с использованием коэффициентов при производных в правой части уравнения.
Решение линейного неоднородного дифференциального уравнения ищут в виде суммы двух составляющих:
 ,
,
где h0 – общее решение, h* –частное решение. В теории управления общее решение называют переходной составляющей, частное решение – вынужденной составляющей:
 .
.
Переходную составляющую находят как решение однородного дифференциального уравнения:

в форме суммы экспонент с произвольными коэффициентами. В показателях степени экспонент используются корни характеристического уравнения
 .
.
Например, если все корни вещественные, причем кратные корни отсутствуют, переходная составляющая имеет вид:
 .
.
Вынужденную составляющую находят в форме, соответствующей правой части. Если правая часть – константа, вынужденная составляющая – также константа, и для ее нахождения достаточно в уравнении положить производные равными нулю.
В качестве примера получим переходную характеристику апериодического звена 2-го порядка с передаточной функцией
 .
.
Соответствующее дифференциальное уравнение звена:
 .
.
В соответствии со сказанным выше требуется решить уравнение
на интервале времени при нулевых начальных условиях  ,
,  , причем благодаря отсутствию производных в правой части пересчет начальных условий не требуется.
, причем благодаря отсутствию производных в правой части пересчет начальных условий не требуется.
Характеристическое уравнение здесь имеет вид:

и имеет два корня  ,
,  .
.
В результате получим выражение для переходной составляющей:
 .
.
Вынужденная составляющая здесь  .
.
Результирующее полное решение уравнения:
 .
.
Найдем C1 и C2:
 ,
,
 ;
;
 ,
,
 ,
,
 ,
,
 ,
,
В результате получена переходная характеристика:
 .
.
Необходимо учесть, что в практических задачах переходные характеристики могут рассматриваться на различных временных интервалах. Для того, чтобы избавиться от необходимости отдельно указывать эту дополнительную информацию, выражения для переходных характеристик домножают на единичную ступенчатую функцию с соответствующим аргументом. Для рассматриваемого примера результат должен быть представлен в следующем виде:
 .
.
График переходной характеристики показан на рисунке 41.
Операторный метод – на основе передаточной функции звена или системы.
Данный метод следует рекомендовать прежде всего при наличии в правой части уравнения звена или системы производных, так как он не требует учета скачкообразного изменения начальных условий. В других случаях он так же, как правило, более удобен, чем классический.
Воспользуемся определениями передаточной функции и переходной характеристики с учетом известного изображения по Лапласу единичной ступенчатой функции  :
:
 .
.
Следовательно, при заданной передаточной функции изображение переходной характеристики можно найти по формуле:
 . (6.1)
. (6.1)
После этого переходная характеристика может быть найдена путем перехода от изображения к оригиналу одним из следующих способов:
- непосредственно с помощью таблицы изображений – в простейших случаях;
- разложением H(s) на сумму табличных изображений;
- с помощью теорем разложения.
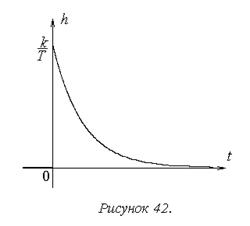
Найдем переходную характеристику дифференцирующего звена с замедлением.
Передаточная функция звена  .
.
Найдем изображение переходной характеристики:
и воспользуемся следующей строкой из таблицы изображений.
| Оригинал | Изображение |

| 
|
Преобразуем имеющееся изображение к табличному виду:
и с учетом линейности преобразования Лапласа получим искомую характеристику:
 .
.
График переходной характеристики показан на рисунке 42.
Найдем переходную характеристику интегрирующего звена с замедлением.
Передаточная функция звена  .
.
Найдем изображение переходной характеристики:
 .
.
Поскольку такое изображение в таблицах, как правило, отсутствует, разложим изображение на сумму:
 .
.
Приведя разложение к общему знаменателю
и приравняв числители полученного и исходного выражений, получим уравнения для коэффициентов:
AT+C=0,
A+BT=0,
B=k,
откуда A= -kT,  .
.
Слагаемые в разложении соответствуют следующим строкам таблицы изображений.
| Оригинал | Изображение |
| 1(t) | 
|

| 
|
|
|
|
В результате получим:
 .
.
Для построения характеристики сначала рассмотрим графики двух слагаемых полученного выражения, которые помогают получить итоговый график (рисунок 43).
В наиболее сложных случаях для нахождения оригинала по изображению используют теоремы разложения.
Найдем переходную характеристику колебательного звена с передаточной функцией  .
.
Найдем изображение переходной характеристики:
 .
.
Воспользуемся одной из теорем разложения:
для изображения вида  оригинал имеет форму
оригинал имеет форму  , где si – корни полинома Y3.
, где si – корни полинома Y3.
В рассматриваемом примере  ,
,  , корни полинома Y3:
, корни полинома Y3:  .
.
Производная Y3:  .
.
Перейдем к оригиналу:
 .
.
Теперь учтем теорему Эйлера  и соответственно
и соответственно  и продолжим преобразование выражения для переходной характеристики:
и продолжим преобразование выражения для переходной характеристики:
и окончательно
 .
.
График характеристики отображает незатухающий колебательный процесс.
Получение переходной функции интегрированием весовой характеристики.
Такая возможность является следствием (6.1) и свойств весовой характеристики, которые будут рассмотрены ниже.
Получение переходной функции на основе анализа преобразования звеном входного сигнала.
Данный способ удобен в ряде частных случаев и основан на представлении звена или системы в виде последовательной или параллельной цепи из простейших звеньев. Например, изодромное звено с передаточной функцией  может быть представлено параллельным соединением безынерционного и идеального интегрирующего звеньев (рисунок 44).
может быть представлено параллельным соединением безынерционного и идеального интегрирующего звеньев (рисунок 44).
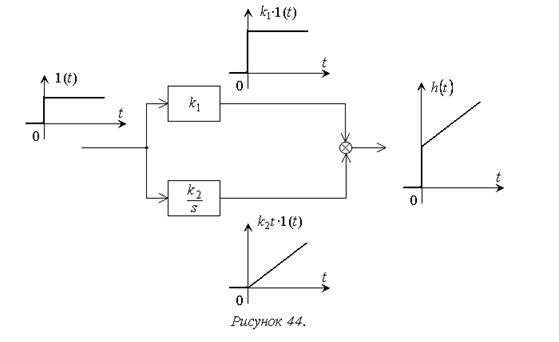
Первое звено масштабирует входной сигнал, второе интегрирует. Результирующая передаточная функция получается суммированием выходных сигналов этих звеньев:
 .
.
Обсудим свойства звена или системы, которые отражает и позволяет анализировать переходная характеристика, на примере апериодического звена 1-го порядка. Полученная для него переходная характеристика (рисунок 41) показывает, что апериодическое звено 1-го порядка воспроизводит входной сигнал. Но это происходит с замедлением – по окончании переходного процесса. То есть данное звено характеризуется инерционностью.
На рисунке 45а показаны варианты этой же переходной характеристики для двух различных значений постоянной времени.
Таким образом, при увеличении значения постоянной времени переходный процесс замедляется. Постоянная времени характеризует инерционность динамического звена.
На рисунке 45б отображено влияние на процесс в звене коэффициента передачи.
Теперь проведем краткий анализ динамических свойств типовых звеньев, отражаемых переходной характеристикой.
На рисунке 46 показаны переходные характеристики типовых позиционных звеньев.
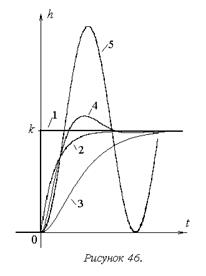
На основе их сравнительного анализа можно сделать следующие выводы:
1. Общим свойством звеньев данной группы является пропорциональность выходного сигнала входному, обеспечиваемая по окончании переходного процесса. Именно это свойство является единственным для идеального звена данной группы – безынерционного (1).
2. Общее отличие всех звеньев от безынерционного состоит в наличии переходного процесса, вызванном их инерционностью. Различия же между звеньями внутри группы определяются количеством и соотношением постоянных времени, то есть характером инерционности.
Так процесс в звеньях второго порядка – апериодическом 2-го порядка (3), колебательном (4) и консервативном(5) – в отличие от апериодического звена 1-го порядка (2), начинает развиваться не мгновенно, так как здесь и начальная скорость изменения сигнала – нулевая.
Кроме того, в зависимости от соотношения постоянных времени у звеньев второго порядка наблюдается различный характер процесса.
Динамические свойства, отражаемые переходной характеристикой, определили названия типовых динамических звеньев.
На рисунке 47 показаны переходные характеристики типовых интегрирующих звеньев.
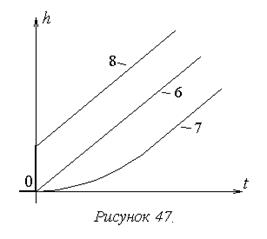
На основе их сравнительного анализа можно сделать следующие выводы:
1. Общее свойство звеньев данной группы отражается характеристикой идеального интегрирующего звена (6) – в установившемся процессе выходной сигнал пропорционален интегралу входного.
2. У остальных звеньев данной группы проявляются дополнительные динамически свойства: инерционность у интегрирующего звена с замедлением (7) и противоположный эффект у изодромного звена (8), приводящий к тому, что процесс в данном звене ускоряется по сравнению с процессом в идеальном звене. Формально такая разница в динамических свойствах отражается расположением постоянной времени в передаточной функции: в знаменателе при наличии инерционности и в числителе в противоположном случае.
На рисунке 48 показаны переходные характеристики типовых дифференцирующих звеньев.
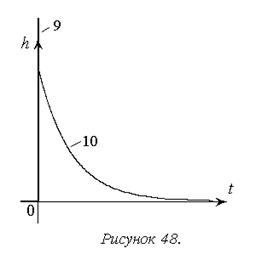
На основе их сравнительного анализа можно сделать следующие выводы:
1. Общее свойство звеньев данной группы отражается характеристикой идеального дифференцирующего звена (9) – в установившемся процессе выходной сигнал пропорционален производной входного.
2. Наличие инерционности у дифференцирующего звена с замедлением (10) приводит к переходному процессу.
Весовая характеристика (весовая функция, функция веса) – это реакция звена или системы на входной сигнал в виде d-функции (функции Дирака).
Вспомним основные свойства d-функции:
 ,
,  ,
,  .
.
Рассмотрим наиболее удобные способы (методы) получения весовой характеристики.
Операторный метод.
Воспользуемся определениями передаточной функции и весовой характеристики с учетом известного изображения по Лапласу d-функции  :
:
 .
.
Следовательно, передаточная функция является изображением по Лапласу функции веса.
Найти весовую характеристику колебательного звена.
Передаточная функция звена  , причем
, причем  и корни знаменателя комплексные.
и корни знаменателя комплексные.
Обратимся к таблице изображений.
| Оригинал | Изображение |

| 
|
Преобразуем передаточную функцию звена к табличному виду
и запишем результат:
 .
.
График весовой характеристики показан на рисунке 50.
Получение весовой функции дифференцированием переходной характеристики.
Следствием полученного выше соотношения  является следующая связь между весовой и переходной функциями:
является следующая связь между весовой и переходной функциями:
 .
.
Вернемся к последнему примеру.
Переходная характеристика апериодического звена 2-го порядка была получена выше:
.
Продифференцируем ее:
 .
.
С учетом тождественного равенства нулю d-функции при всех  упростим полученное выражение:
упростим полученное выражение:
 .
.
График весовой функции показан на рисунке.
Получение весовой функции на основе анализа преобразования звеном входного сигнала - способ аналогичен получению переходной функции.
| <== предыдущая лекция | | | следующая лекция ==> |
| Подготовка основания под насыпь и укладку материалов в дренажные | | | Методы воспроизводства молоди карпа в прудовых хозяйствах. Выращивание товарного карпа в прудовых хозяйствах. |
Дата добавления: 2020-03-21; просмотров: 1453;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- CASE-технология создания информационных систем
- DSM — система классификации Американской психиатрической ассоциации
- F45.38 другие органы или системы
- I Этапы развития САSЕ-систем
- I. История возникновения и развития классно-урочной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
