Методы классификации систем.
В настоящее время существует достаточно много методов классификации систем управления. Отметим некоторые из них.
Наиболее общая классификация с позиций методов исследования систем, учитывающая способы математического описания, характер передачи сигналов, и характер протекания процессов в системах, приведена на рис. 1.3.6.
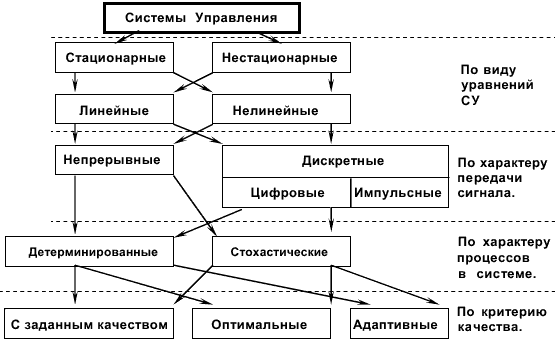
Рис. 1.3.6.
Классификация систем по свойствам в установившемся режиме. По виду зависимости регулируемой величины от внешнего воздействия различают статические и астатические системы.
В статических системах регулируемая величина y(t) при постоянном задающем (возмущающем) воздействии по окончании переходного процесса принимает значение, пропорциональное воздействию, т.е. между входной и выходной величинами устройства имеется строго определенная функциональная связь y=f(u), которую принято называть статической характеристикой. В режиме холостого хода управляемая величина пропорциональна значению задающего воздействия uз, а наклон статической характеристики не зависит от uз. Обычно uз выбирают таким образом, чтобы управляемая величина точно соответствовала требуемому значению при номинальной нагрузке. Примером статической системы автоматического управления может служить электронный стабилизатор напряжения источника питания.
В астатических системах при внешнем воздействии по окончании переходного процесса значение регулируемой величины устанавливается равным заданному, т.е. система в установившемся режиме стремится к нулевому значению между заданным и текущим значением регулируемой величины. Если отклонение управляемой величины в установившемся режиме не зависит от возмущающего воздействия, то система является астатической к этому возмущающему воздействию. Если оно не зависит от задающего воздействия, то система астатическая по отношению к задающему воздействию.
По характеру работы функциональных узлов в составе систем управления выделяют линейные и нелинейные системы.
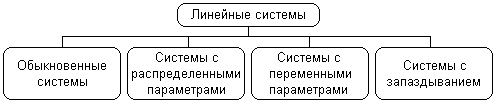
Рис. 1.3.7.
В линейных системах между выходными и входными величинами существуют функциональные зависимости и выполняется принцип суперпозиции (реакция системы на сумму воздействий равна сумме реакций на каждое воздействие в отдельности). Процессы в системах описываются дифференциальными уравнениями. В зависимости от вида дифференциального уравнения линейные системы подразделяются на типы, приведенные на рис. 1.3.7.
В нелинейных системах хотя бы в одном звене системы нарушается принцип суперпозиции (линейность статической характеристики). В уравнениях динамики нелинейных систем присутствуют нелинейные функции (произведение переменных или их производных, степени переменных и т.п.). Возможности и качество управления в нелинейных системах значительно выше, чем в линейных.
Реальные системы управления обычно являются нелинейными и расчет систем достаточно сложен. С учетом хорошей разработанности теории линейных систем, нелинейные системы стремятся привести к линейным, используя методы линеаризации.
По степени использования информации во входных воздействиях системы делятся на адаптивные и неадаптивные.
Адаптивные системы обладают способностью приспосабливаться к изменению внешних условий и воздействий, а также повышать качество управления по мере накопления информации. Неадаптивные системы такими способностями не обладают и имеют постоянную настройку под определенные внешние условия и воздействия с ограниченным диапазоном их вариаций.
В последние десятилетия интенсивно разрабатывается новый класс систем управления - интеллектуальные системы управления (ИСУ). ИСУ строятся как самообучающиеся, самонастраивающиеся системы с гибкими процедурами принятия решений. Они способны формировать новые знания в процессе управления и функционирования, выступать в качестве экспертных систем, встроенных в контур управления, и работать в интерактивном режиме с лицом, принимающим решения.
Классификация по типам управления приведена на рис. 1.3.8.
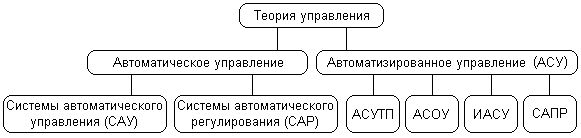
Рис. 1.3.8.
Процесс управления без участия человека, называется автоматическим. Устройство, обеспечивающее автоматическое управление объектом, называется системой автоматического управления (САУ). В тех случаях, когда система обеспечивает стабилизацию управляемой величины в заданных пределах, она называется системой автоматического регулирования (САР).
Под автоматизированным понимается управление объектом в системе с разомкнутой обратной связью с участием человека в выработке управляющих воздействий. Системы, реализующие такое управление, называются автоматизированными системами управления (АСУ). Если объекты управления относятся к типу технических, то системы управления называются автоматизированными системами управления технологическими процессами (АСУТП). Если объект управления является объектом производственно-экономического или социального характера, то система управления им относится к автоматизированным системам организационного управления (АСОУ).
В последние годы все более широко внедряется интегрированное управление, реализуемое интегрированными автоматизированными системами управления (ИАСУ). В ИАСУ объектами управления являются технические, производственно-экономические, организационные и социальные системы. ИАСУ создаются и функционируют на основе ЭВМ и экономико-математических методов, которые используются для управления техническими объектами, технологическими процессами, для планирования, контроля, анализа и регулирования производства в целом.
Систему автоматизированного проектирования (САПР) можно определить как интегрированную автоматизированную систему управления, объектом управления которой является процесс выбора проектно-конструкторских решений на основе экономико-математических моделей изделий, конструкций, архитектурно-планировочных вариантов и т.п.
Классификация по алгоритмам функционирования. Каждая система характеризуется алгоритмом функционирования – совокупностью предписаний, определяющих характер изменения управляемой величины в зависимости от воздействия. По алгоритмам функционирования системы делятся на стабилизирующие, программные, следящие и преобразующие системы.
Стабилизирующие системы обеспечивают поддержание с необходимой точностью (стабилизацию) одной или нескольких управляемых величин при произвольно меняющихся возмущающих воздействиях. Задающее воздействие системы - постоянная величина, т.е. u(t) = const.
Программные системы управляют изменением управляемой величины с необходимой точностью в соответствии с составленной программой, если она заранее известна в виде временной функции. Изменение управляемой величины по программе достигается добавлением к стабилизирующей системе программного устройства ПУ, изменяющего задающее воздействие u(t) во времени по определенному закону. Примерами программных систем являются системы управления химическими процессами, программного управления станками, системы программного управления выводом спутников Земли на расчетные орбиты.
Следящие системыосуществляют изменение управляемой величины не по заранее заданной программе, а произвольно. Например, антенна радиолокатора поворачивается, следуя за самолетом, траектория движения которого заранее неизвестна, т.е. «следит» за ним. Задающие воздействия и управляемые величины следящих систем могут иметь разнообразный характер по своей физической природе.
Преобразующие системы. Алгоритм системы - преобразование с необходимой точностью задающего воздействия (совокупности задающих воздействий) в управляемую величину (совокупность управляемых величин) в соответствии с некоторой функцией преобразования. Преобразующая система должна возможно более точно воспроизводить на своем выходе не само задающее воздействие (как следящая система), а некоторую величину, связанную с управляющим воздействием функций преобразования. К преобразующим системам относятся, например, интегрирующие, дифференцирующие, экстраполирующие и другие системы автоматического управления.
Дата добавления: 2020-03-21; просмотров: 801;
Поиск по сайту
Узнать еще
- DSM — система классификации Американской психиатрической ассоциации
- I. Гидрометаллургические методы
- I. Задачи Единой всероссийской спортивной классификации
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- I. СТРУКТУРА СОВРЕМЕННЫХ НАЛОГОВЫХ СИСТЕМ.
- II. Методы исследования истории медицины.
- II. Пирометаллургические методы.
- II.II. Репродуктивные методы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
