ПЕРЕХОДНЫЕ ПРОЦЕССЫ. Общие сведения
В предыдущих разделах изучались свойства и характеристики электроприводов в установившихся режимах, т.е. при выполнении условия

В настоящей главе рассматриваются неустановившиеся, или переходные, процессы, имеющие место при переходе привода из одного установившегося состояния в другое, совершающемся во времени. При этом

Можно назвать следующие причины возникновения переходных процессов: изменение Мс; изменение М, т.е. переход привода с одной характеристики на другую, имеющий место при пуске, торможении, реверсе, регулировании скорости, изменении какого-либо параметра привода.
Необходимость в анализе переходных процессов возникает в связи с тем, что производительность ряда ответственных механизмов (например, реверсивного прокатного стана) определяется быстротой протекания переходных процессов; качество выполнения многих технологических операций определяется переходными процессами (движение лифта, врезание резца в деталь и т.п.); механические и электрические перегрузки оборудования в большинстве случаев определяются переходными процессами.
Объектом исследования, как и прежде, будет упрощенная, идеализированная модель привода (рис. 5.1).
Основная задача при изучении переходных процессов сводится к определению зависимостей w(0, M(t) и /(/) для любых конкретных приводов в любых условиях.
При изучении переходных процессов мы будем полагать известными
следующие исходные данные:
|
начальное состояние: конечное состояние: 
и соответствующая ему характеристика  ;
;
характер изменения во времени фактора, вызвавшего переходный процесс;
параметры привода.
Всевозникающие на практике задачи в целях их упорядоченного изучения разделим на четыре большие группы.
1. Преобладающей инерционностью в приводе является механическая инерционность (J); электрические инерционности (L) малы или не проявляются. Фактор, вызывающий переходный процесс, изменяется скачкообразно (мгновенно), т.е. много быстрее, чем скорость.
Примеры задач, относящихся к этой группе: мгновенный наброс и сброс нагрузки, пуск, реверс, торможение, регулирование скорости асинхронных двигателей при питании от сети, если не учитывать индуктивности обмоток; то же для двигателей постоянного тока независимого возбуждения, если Ф = const,  то же для двигателей последовательного или смешанного возбуждения, если
то же для двигателей последовательного или смешанного возбуждения, если 
2. Преобладающая инерционность — механическая (J); индуктивности электрических цепей малы или не проявляются. Фактор, вызывающий переходный процесс, изменяется не мгновенно, т.е. темп его изменения соизмерим с темпом изменения скорости со («медленное» изменение воздействующего фактора).
Примеры: переходные процессы в системах управляемый преобразователь — двигатель постоянного тока, преобразователь частоты - асинхронный двигатель, если L = О,
3. Механическая и электрическая инерционности соизмеримы; фактор, вызывающий переходный процесс, изменяется мгновенно.
Примеры: переходные процессы в приводе постоянного тока при Ф = var; то же при Ф = const, не  , то же в системе источник тока —двигатель.
, то же в системе источник тока —двигатель.
4. Учитываются несколько инерционностей, фактор, вызывающий переходный процесс, изменяется не мгновенно. Эти наиболее сложные задачи, относящиеся к замкнутым системам регулирования, мы рассмотрим очень кратко — они детально изучаются в специальных курсах.
5.2. Переходные процессы при L = О и «быстрых» изменениях воздействующего фактора
 Все переходные процессы, относящиеся к первой группе, подчиняются уравнению движения. Искомые зависимости <в(0 и M(t) должны быть получены путем решения этого уравнения при заданных начальных условиях. Конкретные особенности привода отразятся в виде зависимостей М((о) и
Все переходные процессы, относящиеся к первой группе, подчиняются уравнению движения. Искомые зависимости <в(0 и M(t) должны быть получены путем решения этого уравнения при заданных начальных условиях. Конкретные особенности привода отразятся в виде зависимостей М((о) и  входящих в (5.1).
входящих в (5.1).
5.2.1. Переходные процессы при М = const, 
Начнем рассмотрение задач первой группы с простейшего случая, когда в переходном процессе М= const и 
Пусть привод (рис. 5.1) работал в точке  (рис. 5.2)
(рис. 5.2)
некоторой характеристики (она нас не интересует) и в момент времени / = О был мгновенно переведен на новую характеристику, показанную на рис. 5.2, а жирной линией.
Уравнение (5.1) — дифференциальное уравнение с разделяющимися переменными, и его решение имеет вид

Постоянную интегрирования С найдем из начального условия — при


|
Окончательно будем иметь 

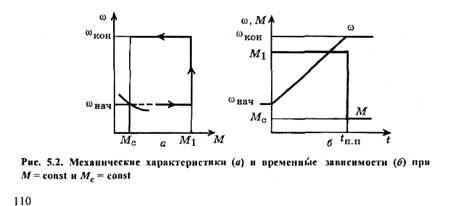 Графики переходного процесса приведены на рис. 5.2, б. Время переходного процесса /п п можно найти, подставив в (5.2 и решив
Графики переходного процесса приведены на рис. 5.2, б. Время переходного процесса /п п можно найти, подставив в (5.2 и решив
относительно t:
 Этот же результат, конечно, можно получить, решив (5.1) относительно dt и взяв определенный интеграл:
Этот же результат, конечно, можно получить, решив (5.1) относительно dt и взяв определенный интеграл:

Рассмотренный простейший случай имеет очень большое практическое значение, так как к нему может быть сведено в целях оценки времени и характера переходного процесса большое число конкретных задач.
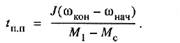
Пример.Рассмотрим прямой пуск короткозамкнутого асинхронного двигателя с известными механической характеристикой, моментом сопротивления  и моментом инерции J.
и моментом инерции J.
Схема, которая обычно используется для двигателей небольшой мощности (7—10 кВт), показана на рис. 5.3, а. Она содержит кроме двигателя М воздушный автоматический выключатель QF, трехфазный линейный контактор КМ, две кнопки — SB1 (пуск) и SB2 (стоп) с замыкающими и размыкающими контактами,
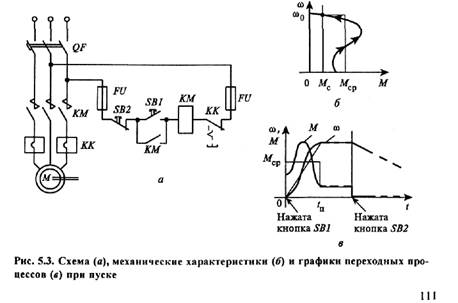 тепловое реле КК, плавкие предохранители FU. Контактор и тепловое реле обычно конструктивно объединены в одном аппарате — магнитном пускателе.
тепловое реле КК, плавкие предохранители FU. Контактор и тепловое реле обычно конструктивно объединены в одном аппарате — магнитном пускателе.
При включенном предварительно автоматическом выключателе нажатие на кнопку SB! приведет к срабатыванию контактора КМ, который силовыми замыкающими контактами подключит статор двигателя к сети, т.е. осуществит пуск привода, а вспомогательным замыкающим контактом заблокирует кнопку SBJ, оставив цепь катушки КМ замкнутой после отпускания кнопки.
 Нажатие на кнопку SB2 разорвет цепь катушки КМ, силовые контакты КМ отключат двигатель от сети, и он остановится под действием момента А/с. Отключение может осуществляться и контактом КК, если ток статора превысит допустимое значение на 30—40 % — так осуществлена защита от небольших перегрузок и обрыва фазы. От коротких замыканий защищает автоматический выключатель QF. Защита от самопроизвольного запуска после исчезновения и повторной подачи напряжения осуществляется контактором КМ — он может повторно включиться лишь при нажатии кнопки SB1.
Нажатие на кнопку SB2 разорвет цепь катушки КМ, силовые контакты КМ отключат двигатель от сети, и он остановится под действием момента А/с. Отключение может осуществляться и контактом КК, если ток статора превысит допустимое значение на 30—40 % — так осуществлена защита от небольших перегрузок и обрыва фазы. От коротких замыканий защищает автоматический выключатель QF. Защита от самопроизвольного запуска после исчезновения и повторной подачи напряжения осуществляется контактором КМ — он может повторно включиться лишь при нажатии кнопки SB1.
Мы подробно описали простейшую схему пуска асинхронного двигателя с короткозамкнутым ротором в связи с ее повсеместным применением. В справочниках можно найти варианты этой схемы с добавленными функциями — реверса, торможения и др.
Для оценки времени пуска можно воспользоваться механической характеристикой на рис. 5.3, 6 (жирная линия), аппроксимировав ее вертикальной и горизонтальной прямыми {тонкие линии), откуда получим
|
Зная /п, можно построить приближенные графики переходного процесса (тонкие линии на рис. 5.3, в). Эти графики будут отличаться от действительных (жирные линии на рис. 5.3, в), однако во многих случаях полученная оценка может быть весьма полезной.
5.2.2. Переходные процессы при  = const и моменте
= const и моменте  , линейно зависящем от
, линейно зависящем от  < О
< О
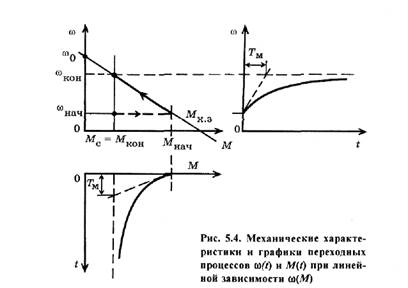
Пусть характеристики двигателя и механизма имеют вид, представленный на рис. 5.4. Уравнение линейной механической характеристики двигателя с отрицательной жесткостью может быть записано как
|
где  — жесткость механической характеристики; для линейной
— жесткость механической характеристики; для линейной
характеристики 
Подставив (5.5) в (5.1), после простых преобразований получим
Выражение в правой части, как следует из (5.4), представляет собой  Обозначив коэффициент перед производной через
Обозначив коэффициент перед производной через  , запишем:
, запишем:
 Теперь подставим в (5.1) вместо
Теперь подставим в (5.1) вместо  еевыражение из (5.4):
еевыражение из (5.4): 
и, использовав принятые выше обозначения, получим
Итак, мы обнаружили, что в рассматриваемом переходном процессе как для скорости, так и для момента справедливо уравнение вида  т.е. линейное неоднородное дифференциальное уравнение с постоянной правой частью.
т.е. линейное неоднородное дифференциальное уравнение с постоянной правой частью.
|
| Коэффициент при производной |
называют электромеханической постоянной времени.
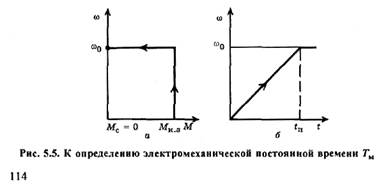
Для выяснения смысла этой величины рассмотрим условный привод с характеристикой, показанной на рис. 5.5, а. Определяя время разгона такого привода по (5.3)

замечаем, что оно выражается так же, как  В связи с этим можно считать, что электромеханическая постоянная времени
В связи с этим можно считать, что электромеханическая постоянная времени  представляет собой время, за которое привод разогнался бы вхолостую до
представляет собой время, за которое привод разогнался бы вхолостую до  под действием момента короткого замыкания. Другие выражения для Тм приведены в (5.9). В некоторых частных случаях оказывается удобным выражать Тм через параметры привода. Так, для двигателя постоянного тока
под действием момента короткого замыкания. Другие выражения для Тм приведены в (5.9). В некоторых частных случаях оказывается удобным выражать Тм через параметры привода. Так, для двигателя постоянного тока

|
| Подставив это выражение в (5.9), получим |

|
независимого возбуждения можно выразить жесткость характеристики как 
Правая часть уравнения (5.8) представляет собой конечное значение переменной, т.е. установившееся значение, которое будет достигнуто после окончания переходного процесса.

|
|
Решение (5.8) имеет видгде  — свободная и
— свободная и  — принужденная составляющие переменной х',
— принужденная составляющие переменной х',
р — корень характеристического уравнения 
А — постоянная, определяемая из начального условия: 
Итак,  окончательно имеем:
окончательно имеем:
 (5.10)
(5.10)
т.е. скорость и момент изменяются в переходном процессе от начальных до конечных значений по экспоненциальному закону с постоянной времени Тм (см. рис. 5.4).
Напомним некоторые важные свойства экспоненциальной функции.
1. Касательная в любой точке отсекает на линии установившегося состояния ,отрезок, равный 
2. За время  изменение величины составляет 0,632 полного изменения.
изменение величины составляет 0,632 полного изменения.
3. За время  «пленение составляет 0,95 полного. В дальнейшем мы будем считать, что процесс устанавливается за t = ЗГМ.
«пленение составляет 0,95 полного. В дальнейшем мы будем считать, что процесс устанавливается за t = ЗГМ.
Уравнение (5.10) позволяет решать любые задачи, относящиеся к рассматриваемому типу.
Пример 1. Рассчитать переходный процесс мгновенного наброса нагрузки от  на асинхронный короткозамкнутый двигатель с механической характеристикой, линейной на рабочем участке (рис. 5.6).
на асинхронный короткозамкнутый двигатель с механической характеристикой, линейной на рабочем участке (рис. 5.6).
Вычислим  :
:
|
Определим начальные и конечные значения

|
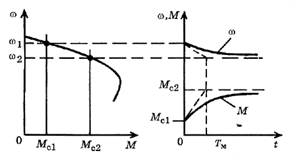
Рис. 5.6. Переходный процесс наброса нагрузки
Запишем по (5.10) уравнения переходного процесса
и построим графики(рис. 5.6).
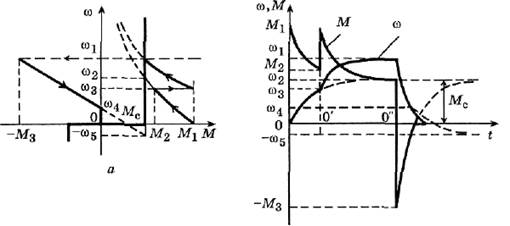
Пример2. Рассчитать переходный процесс пуска с одной ступенью пускового реостата и динамического торможения с самовозбуждением двигателя постоянного тока последовательного возбуждения;  реактивный.
реактивный.
Построим сначала пусковую диаграмму и тормозную характеристику (рис. 5.7, а) — см. § 3.3, 3.5. Если на рабочих участках характеристики близки к прямым, можно воспользоваться аналитическим решением задачи. В данном случае механические характеристики имеют разрывы (при  ) и изломы (при
) и изломы (при
 ), поэтому необходимо разделить весь процесс на участки таким образом, чтобы в пределах каждого участка функции
), поэтому необходимо разделить весь процесс на участки таким образом, чтобы в пределах каждого участка функции  и
и  были линейными и не имели изломов и разрывов.
были линейными и не имели изломов и разрывов.
В нашем случае таких участков будет четыре:
 (пуск на реостатной характеристике); ;пуск на естественной характеристике);
(пуск на реостатной характеристике); ;пуск на естественной характеристике);  (торможение с самовозбуждением);
(торможение с самовозбуждением);  ^торможение под действием
^торможение под действием  I.
I.
К первым трем участкам может быть применена формула (5.10), так как в пределах этих участков  — линейные функции; к IV участку, где
— линейные функции; к IV участку, где 
и Л/с = const, следует применить решение, полученное в п. 5.2.1, т.е. формулу (5.2).

Обратим внимание на то, что отсчет времени в уравнениях (5.2) и (5.10), которыми мы будем пользоваться, ведется от момент  в который произошло изменение, вызвавшее переходный процесс, поэтому, решая задачу по этапам,
в который произошло изменение, вызвавшее переходный процесс, поэтому, решая задачу по этапам,

|
Таблица
следует на каждом этапе отсчет времени вести от своего начала; общее время переходного процесса определится, конечно, как сумма времен на этапах.
Для того чтобы воспользоваться уравнениями (5.2) и (5.10), следует определить входящие в них начальные и конечные значения величин и постоянные времени.
Начальные значения скорости очевидны из графика ω (М) — это фактические значения скорости в начале соответствующего этапа. При определении начальных значений момента следует помнить, что в рассматриваемых задачах мы пренебрегаем инерционностью электрических цепей и считаем, что ток, а следовательно, и момент изменяются мгновенно при изменении параметров привода, т.е. при переходе с характеристики на характеристику. На графике  это соответствует горизонтальным линиям — момент изменяется скачком при
это соответствует горизонтальным линиям — момент изменяется скачком при  = const. Поэтому в качестве начальных значений момента следует брать значения из графика
= const. Поэтому в качестве начальных значений момента следует брать значения из графика  получившиеся после соответствующего мгновенного изменения характеристики.
получившиеся после соответствующего мгновенного изменения характеристики.
В качестве конечных значений  и М при использовании уравнения (5.10) следует всегда брать координаты точки пересечения двух прямых
и М при использовании уравнения (5.10) следует всегда брать координаты точки пересечения двух прямых  и >
и >  , т.е. точки установившегося режима, независимо от того, будет достигнут этот режим фактически или нет. Это важное правило вытекает из того, что уравнение (5.10) есть решение уравнения (5.8) именно при указанных условиях. Постоянные времени определяются для каждого этапа по (5.9).
, т.е. точки установившегося режима, независимо от того, будет достигнут этот режим фактически или нет. Это важное правило вытекает из того, что уравнение (5.10) есть решение уравнения (5.8) именно при указанных условиях. Постоянные времени определяются для каждого этапа по (5.9).
Для рассматриваемой задачи начальные и конечные значения приведены в таблице (следует обратить внимание на подчеркнутые величины).
Данные таблицы позволяют записать уравнения для каждого из четырех этапов и построить графики (рис. 5.7, б).
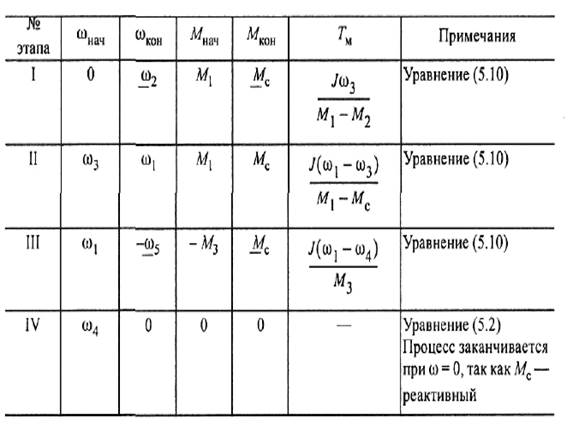
Пример 3.Рассчитать и построить кривые переходного процесса реверса двигателя постоянного тока независимого возбуждения, питающегося от сети U = = const, при активном и реактивном характере 
Решение, как всегда, начнем с построения графиков  (рис. 5.8, а); график
(рис. 5.8, а); график
реактивного  показан жирными штриховыми линиями.
показан жирными штриховыми линиями.
Рассмотрим сначала случай, когда момент  При этом переходный
При этом переходный
процесс протекает в один этап, а его уравнения, полученные из (5.10), имеют вид:
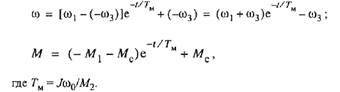
Соответствующие графики построены на рис. 5.8, б сплошными линиями.
При  изменяющем знак при со = 0, необходимо рассматривать
изменяющем знак при со = 0, необходимо рассматривать
два этапа:  На I этапе уравнения не будут
На I этапе уравнения не будут
отличаться от полученных ранее. Действительно, на этом этапе реактивный характер  не проявляется и он, как и в первом случае, способствует торможению привода. Этот результат соответствует правилу, изложенному в предыдущем примере.
не проявляется и он, как и в первом случае, способствует торможению привода. Этот результат соответствует правилу, изложенному в предыдущем примере.
На II этапе изменяется знак  и, в противоположность предыдущему случаю,
и, в противоположность предыдущему случаю,  оказывает тормозящее действие при разгоне привода в противоположную сторону. Уравнения для этого этапа имеют вид:
оказывает тормозящее действие при разгоне привода в противоположную сторону. Уравнения для этого этапа имеют вид:
Графики переходных процессов при реактивном  построены на рис. 5.8, б жирными штриховыми линиями. В момент времени
построены на рис. 5.8, б жирными штриховыми линиями. В момент времени  кривые терпят излом, темп процесса замедляется, что связано со скачкообразным уменьшением динамического момента, обусловленным изменением знака
кривые терпят излом, темп процесса замедляется, что связано со скачкообразным уменьшением динамического момента, обусловленным изменением знака 
Если требуется найти зависимость  следует воспользоваться известным соотношением
следует воспользоваться известным соотношением
|
5.2.3. Переходные процессы при  и моменте М, линейно
и моменте М, линейно
зависящем от ю, р1 > О
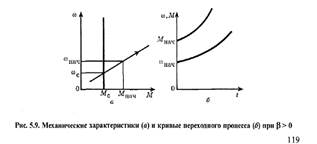
Рассмотренные выше переходные процессы при р < 0 соответствовали устойчивой точке установившегося режима  т.е. со и Л/, изменяясь, стремились к этой точке. Вместе с тем, иногда требуется рассчитывать переходные процессы при р > 0, что соответствует неустойчивой точке установившегося режима (рис. 5.9, а).
т.е. со и Л/, изменяясь, стремились к этой точке. Вместе с тем, иногда требуется рассчитывать переходные процессы при р > 0, что соответствует неустойчивой точке установившегося режима (рис. 5.9, а).
В этом случае уравнение механической характеристики привода запишется как

|
что приведет после подстановки этих выражений в (5.1) и выполнения преобразований к уравнению
|
(5.11)
где х — скорость или момент;  — скорость или момент, соответствующие точке установившегося режима (рис. 5.9, а).
— скорость или момент, соответствующие точке установившегося режима (рис. 5.9, а).
По сравнению с (5.8) в этом уравнении изменился знак перед производной, а в правой части стоит величина  не имеющая теперь смысла конечного значения переменной.
не имеющая теперь смысла конечного значения переменной.
Решим уравнение (5.11), как уравнение с разделяющимися переменными; кстати, мы могли бы решить этим приемом и уравнение (5.8):
Использовав начальные условия / = 0,  получим
получим

|
Графики  соответствующие(5.12), показаны на рис.5.9, б.
соответствующие(5.12), показаны на рис.5.9, б.
5.2.4. Переходные процессы, когда  и М - линейные функции
и М - линейные функции 

|
Полученные в пп. 5.2.2 и 5.2.3 результаты можно распространить на случай, когда Л/и  —линейные функции скорости.
—линейные функции скорости.
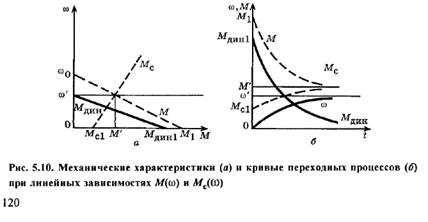
Пример4. Пусть требуется рассчитать переходный процесс пуска привода, если характеристики двигателя и нагрузки заданы, как показано на рис. 5.10, а штриховыми линиями. Заменим эти характеристики одной — зависимостью динамического момента  от скорости. Эта зависимость линейна, так
от скорости. Эта зависимость линейна, так
|
как линейны  и
и  — сплошная линия на рис. 5.10, а. Теперь, восполь-
— сплошная линия на рис. 5.10, а. Теперь, восполь-
зовавшись полученными ранее результатами, можно получить зависимости  и
и  При этом
При этом  =0,
=0,  :
:  =
=  ,= 0
,= 0
кривые построены на рис. 5.10, б сплошными линиями, если необхо-
димо, можно построить и графики  и
и  так как известны начальные
так как известны начальные
и конечные величины (рис. 5.10, а) и определена  Эти графики показаны на рис. 5.10, б— штриховые кривые.
Эти графики показаны на рис. 5.10, б— штриховые кривые.
5.3. Переходные процессы при 1=0 и «медленных» изменениях воздействующего фактора
К задачам данной группы ранее были отнесены переходные процессы в системе преобразователь — двигатель (  . Фактор, вызывающий
. Фактор, вызывающий
переходный процесс, изменяется не мгновенно), мп его изменения соизмерим с темпом изменения скорости привода в переходном процессе); учитывается только механическая инерция в приводе (J), индуктивности в цепях двигателя малы или не проявляются.
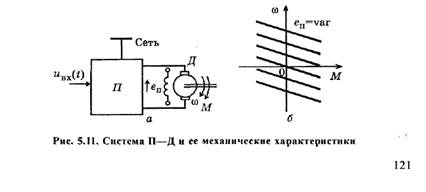
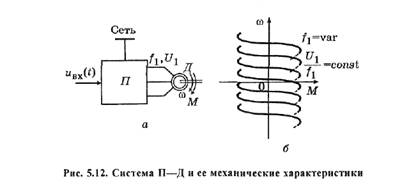
Типичные структуры системы П—Д и соответствующие механические характеристики показаны на рис. 5.11 и 5.12.
Роль преобразователя /7 в схеме на рис. 5.11, как отмечалось, может играть генератор (система Г—Д) или тиристорные преобразователь (  ). Фактор, вызывающий переходный процесс в этих системах, — изменение входного сигнала
). Фактор, вызывающий переходный процесс в этих системах, — изменение входного сигнала  , приводящее к изменению ЭДС преобразователя
, приводящее к изменению ЭДС преобразователя 
Роль преобразователя  в схеме на рис. 5.12 играет статический ПЧ. Фактор, вызывающий переходный процесс в этих системах, — изменение входного сигнала ивх, приводящее к изменению частоты и напряжения на выходе преобразователя.
в схеме на рис. 5.12 играет статический ПЧ. Фактор, вызывающий переходный процесс в этих системах, — изменение входного сигнала ивх, приводящее к изменению частоты и напряжения на выходе преобразователя.
Как и прежде, целью изучения переходных процессов в системе  будет определение зависимостей
будет определение зависимостей  и иногда ,
и иногда ,  при известных ус-
при известных ус-
ловиях переходного процесса и параметрах привода.
Введем ряд условий и допущений.
1. Механические характеристики привода  i известны, линейны(по крайней мере, на рабочих участках) и параллельны друг другу, т.е.выражаются уравнением (5.4):
i известны, линейны(по крайней мере, на рабочих участках) и параллельны друг другу, т.е.выражаются уравнением (5.4):
где  — жесткость характеристик.
— жесткость характеристик.
2. Известны или могут быть определены зависимости  или
или 
т.е. закон изменения во времени фактора, вызывающего переходный процесс. Так как  или
или  однозначно связаны со скоростью идеального холостого хода привода
однозначно связаны со скоростью идеального холостого хода привода 
—- для схемы на рис. 5.11,  — для схемы на рис. 5.12,
— для схемы на рис. 5.12,
то известен закон изменения во времени 
3. Известны начальное  и конечное
и конечное  состояния привода, момент инерции
состояния привода, момент инерции  и момент сопротивления
и момент сопротивления 
4. Преобразователь  обладает двусторонней проводимостью, т.е. характеристики
обладает двусторонней проводимостью, т.е. характеристики  могут располагаться во всех квадрантах плоскости
могут располагаться во всех квадрантах плоскости 
Рассмотрим прежде всего качественные отличия переходных процессов в системе  от изученных ранее случаев, когда
от изученных ранее случаев, когда  или
или  изменялись мгновенно, т.е. мгновенно устанавливалась соответствующая новая механическая характеристика, а изменение скорости
изменялись мгновенно, т.е. мгновенно устанавливалась соответствующая новая механическая характеристика, а изменение скорости  \ момента
\ момента  в переходном процессе происходило согласно именно этой характеристике. Переходный процесс определялся статической механической характеристикой привода.
в переходном процессе происходило согласно именно этой характеристике. Переходный процесс определялся статической механической характеристикой привода.
 В рассматриваемых далее задачах
В рассматриваемых далее задачах  ли
ли  изменяются, как указывалось, не мгновенно, т.е. переход привода с одной характеристики на другую происходит постепенно, одновременно с изменением скорости, в результате чего соответствие между скоростью
изменяются, как указывалось, не мгновенно, т.е. переход привода с одной характеристики на другую происходит постепенно, одновременно с изменением скорости, в результате чего соответствие между скоростью  и моментом
и моментом  в каж-
в каж-
дый момент времени определяется не статической механической характеристикой, а другой, отличной от нее характеристикой, которую мы далее будем называть динамической. Механической характеристикой или просто динамической характеристикой.
В качестве примера на рис. 5.13 показаны статическая характеристика асинхронного двигателя при номинальной частоте I, по ко-
торой будет происходить пуск при мгновенном приложении к двигателю напряжения такой частоты, и динамическая характеристика 2, соответствующая пуску двигателя путем
плавного изменения частоты от нуля до номинальной по некоторому закону.
Динамические характеристики определяются темпом изменения фактора, вызывающего переходный процесс, и параметрами привода, могут очень сильно отличаться от статических характеристик и даже иметь совсем другую форму.
Легко обнаружить связь зависимостей  с динамической
с динамической
характеристикой привода: исключив время t из уравнений  мы получим динамическую характеристику.
мы получим динамическую характеристику.
 Уравнения, описывающие переходные процессы Из уравнения механической характеристики
Уравнения, описывающие переходные процессы Из уравнения механической характеристики  получим
получим

Подставляя полученное выражение в уравнение движения (5.1), после элементарных преобразований имеем
 (5.13)
(5.13)
Коэффициент при производной,  как и раньше, — электромехани-
как и раньше, — электромехани-
ческая постоянная времени  Правая часть уравнения представляет собой скорость
Правая часть уравнения представляет собой скорость  соответствующую моменту сопротивления
соответствующую моменту сопротивления  однако в рассматриваемом случае
однако в рассматриваемом случае  а значит, и
а значит, и  не постоянные величины, а известные функции времени
не постоянные величины, а известные функции времени  Таким образом, уравнение (5.13) имеет вид
Таким образом, уравнение (5.13) имеет вид
 (5.14) 123Решение этого дифференциального уравнения определит искомую зависимость '
(5.14) 123Решение этого дифференциального уравнения определит искомую зависимость ' 
Для получения зависимости  удобно воспользоваться непосредственно уравнением движения
удобно воспользоваться непосредственно уравнением движения  , подставив в него производную найденной функции
, подставив в него производную найденной функции 
 (5.15)
(5.15)
Правая часть уравнения (5.14), вообще говоря, может иметь любой вид. Закон  для безынерционного преобразователя формируется на
для безынерционного преобразователя формируется на
его входе; при инерционном преобразователе закон  связан со свой-
связан со свой-
ствами преобразователя. В ряде случаев закон  формируется таким
формируется таким
образом, чтобы получить требуемый закон 
5.3.2. Уравнения переходных процессов при линейном законе изменения 
Получим решение уравнения (5.14) для одного важного вида функции  для линейного изменения
для линейного изменения  во времени:
во времени:
 (5.16)
(5.16)
Такая функция может быть сформирована при безынерционном преобразователе с помощью задатчика интенсивности.
Мы используем здесь общее уравнение прямой, не накладывая пока никаких ограничений на величины  чтобы, рассматривая частные
чтобы, рассматривая частные
случаи, можно было пользоваться полученным общим результатом.
Уравнение (5 Л 4) с учетом (5.16) имеет вид
 (5-17)
(5-17)
Решение будем искать, как и прежде, в виде суммы свободной (Осв и принужденной  составляющих:
составляющих:


Свободная составляющая, т.е. решение однородного уравнения, полученного из (5.17), имеет вид
Принужденную составляющую будем искать, учитывая (5.16), в виде
так как после затухания свободной составляющей скорость будет линейно изменяться во времени. Подставив  получим;
получим;

или

Подставим теперь 

Постоянную А найдем, использовав начальные условия: при / = О
откуда

Окончательно будем иметь:
 (5-18)
(5-18)
Перейдем теперь к рассмотрению некоторых конкретных переходных процессов в системе 
5.3.3. Пуск вхолостую
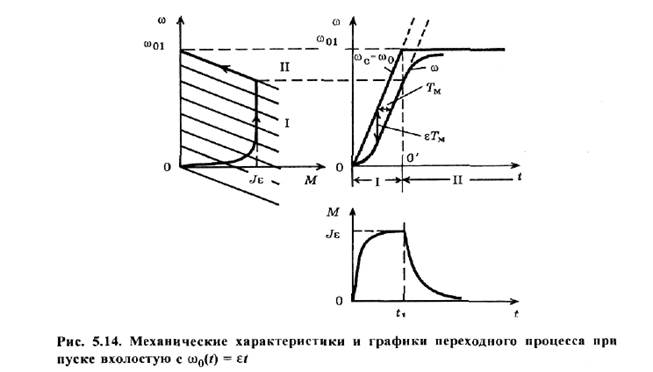
Будем полагать, что закон изменения во времени фактора, вызывающего переходный процесс,  или в общем случае
или в общем случае  имеет вид, представленный на рис. 5.14 справа вверху. Так как
имеет вид, представленный на рис. 5.14 справа вверху. Так как  (пуск вхолостую), то
(пуск вхолостую), то  будет совпадать с
будет совпадать с  см. уравнение (5.13), т.е. а- 0 и
см. уравнение (5.13), т.е. а- 0 и

где  ускорение, характеризующее темп изменения
ускорение, характеризующее темп изменения  при при
при при  Излом функции
Излом функции  при
при  свидетельствует о том, что переходный
свидетельствует о том, что переходный
процесс состоит из двух этапов и его необходимо рассчитать отдельно для каждого.
 Приняв, что при
Приняв, что при  и подставив в (5.18)
и подставив в (5.18)
 получим
получим
 (5.19) 125
(5.19) 125
Воспользовавшись уравнением (5.15), найдем закон изменения момента во времени:
 (5.20)
(5.20)
Проанализируем полученные уравнения. Ускорение привода определится как
и при  Этот результат очевиден: при
Этот результат очевиден: при  I,
I,
т.е.  привод не развивает момента и в соответствии с урав-
привод не развивает момента и в соответствии с урав-
нением движения (5.1) 
 т.е. скорость изменяется в том же темпе,
т.е. скорость изменяется в том же темпе,
что и фактор, вызывающий переходный процесс. Из уравнения (5.19) следует, что при 
 (5.19а)
(5.19а)
Графики шс(0 и со(0 представлены на рис. 5.14. Кривая <о{/) сдвинута вправо относительно кривой шс(0 на величину Тм; в каждый момент времени при  ~ разница между
~ разница между  и со составляет
и со составляет 
Момент в соответствии с (5.20) возрастает по экспоненциальному закону (рис. 5.14) и при  достигает значения
достигает значения
 (5.20а)
(5.20а)
Это соотношение позволяет оценить допустимое значение е. Действительно, если считать, что в переходном процессе  то
то

В частности, можно найти минимальное время пуска привода, при котором момент не превысит допустимого значения:

Если положить, что  что справедли-
что справедли-
во для электрической машины средней мощности общего назначения, то
получим
 , а значит, и
, а значит, и  или
или  имеют постоянное значение. Переходный процесс в этом случае ничем не отличается от рассмотренных ранее переходных процессов, отнесенных к первой группе задач. Если отсчитывать время от
имеют постоянное значение. Переходный процесс в этом случае ничем не отличается от рассмотренных ранее переходных процессов, отнесенных к первой группе задач. Если отсчитывать время от  то скорость
то скорость  и момент М будут изменяться в соответствии с уравнением (5.10); в качестве
и момент М будут изменяться в соответствии с уравнением (5.10); в качестве










