Способы повышения точности частотных РВ
Точность измерения высоты частотными РВ зависит от многих факторов. К основным составляющим результирующей ошибки РВ относятся:
· методические ошибки, вызванные:
-периодичностью закона частотной модуляции;
-измерением средней Fpср, а не минимальной Fp0 частоты спектра разностного сигнала;
- неучетом влияния доплеровского смещения частоты при изменении профиля полета ЛА;
- дискретностью отсчета высоты;
· динамическая ошибка;
· флуктуационная ошибка;
· ошибка индикации (указателя высоты);
· аппаратурные ошибки, вызванные нестабильностью закона частотной модуляции и другие.
Аппаратурные ошибки частотного РВ возникают вследствие нестабильности девиации частоты Df и частоты модуляции Fм, нестабильности частоты генератора СВЧ колебаний. Уменьшение влияния таких ошибок достигается применением в РВ схем автокалибровки постоянной радиовысотомера, определяемой выражением
Ошибки индикации определяются классом точности указателя высоты и могут быть уменьшены при использовании индикаторов с цифровым отсчетом.
Флуктуационная ошибка измерения высоты обусловлена случайным характером сигнала разностной частоты и действием внутренних шумов приемника. Для уменьшения этой ошибки необходимо обеспечивать максимально возможное отношение сигнал/шум на входе измерителя разностной частоты, уменьшать полосу пропускания приемного тракта, добиваться уменьшения ширины спектра сигнала разностной частоты.
Периодический характер закона модуляции приводит к наличию зон обращения, что является причиной появления методической ошибки измерения высоты. Однако при условии tН << ТМ, которое обычно выполняется в РВ малых высот, данная ошибка весьма незначительна.
Во многих частотных РВ для измерения разностной частоты используется счетчик импульсов, формируемых из сигнала разностной частоты. Это приводит к появлению характерной для данного метода измерений методической ошибки дискретности счета, связанной с нарушением кратности периода модуляции Тм и периода сигнала разностной частоты Тр0 = 1/Fp0.
При измерении высоты полета Н изменяется разностная частота Fp0, а следовательно, и число формируемых импульсов N0. Счетчик фиксирует только целые числа импульсов, соответствующие определенным уровням высоты. В промежутках между этими уровнями РВ будет давать показания, соответствующие ближайшему целому значению. В этом и состоит причина появления методической ошибки, обусловленной дискретностью счета, когда измеряемый параметр (высота) изменяется непрерывно, а измеритель фиксирует только определенные её дискретные значения.
Величина ошибки дискретности отсчета высоты

Анализ данного выражения показывает, что методическая ошибка измерения высоты из-за дискретности отсчета зависит только от девиации частоты и уменьшается при увеличении Df. Однако при увеличении девиации частоты Df расширяется спектр сигнала разностной частоты, что приводит к увеличению флуктуационной ошибки. На практике Df = 25¸50 МГц, при этом методическая ошибка дискретности отсчета высоты составляет DН = 0,75¸1,5 м, т.е. является достаточно большой.
Для уменьшения методической ошибки дискретности отсчета, в современных РВ используется двойная частотная модуляция, когда по определенному закону изменяется параметр закона основной модуляции. При этом различают РВ с переменной средней частотой и с переменной девиацией частоты.
Закон изменения частоты излучаемых колебаний в РВ с переменной средней частотой имеет вид
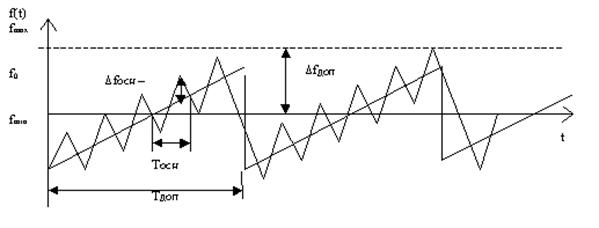
Средняя частота излучения f0 изменяется с частотой модуляции FмДОП и девиацией частоты DfДОП. Частота дополнительной модуляции FмДОП < FмОСН, при этом выполняются условия  ,
,  , где tн max- максимальная задержка сигнала при распространении от ЛА до земной поверхности и обратно.
, где tн max- максимальная задержка сигнала при распространении от ЛА до земной поверхности и обратно.
На выходе БС формируется сигнал разностной частоты Fр= fпрд – fпрм, несущий информацию о высоте:
 ,
,
где Н – высота полета;
Ти – период перестройки частоты ПРД в пределах полосы частотной модуляции Df.
В состав приемника, кроме БС, входят усилитель низкой частоты (УНЧ) и бинарный квантователь (БК).
Выходной сигнал БС усиливается УНЧ до уровня, необходимого для устойчивой работы схемы слежения за его частотой. При этом полезный сигнал фильтруется от шумов и помех, а необходимое значение коэффициента усиления устанавливается двоичным кодом, поступающим на соответствующий вход УНЧ из управителя и являющимся функцией измеряемой высоты. Такая АРУ необходима для предотвращения ухудшения с высотой отношения сигнал/шум.
БК контролирует выходной сигнал УНЧ, и если его уровень превышает пороговый, то подает на входы обнаружителя и дискриминатора импульсы, следующие с частотой Fр (т.е. преобразует выходной сигнал УНЧ в вид, необходимый для дальнейшей цифровой обработки).
В РВ предусмотрены два основных режима работы: поиск и слежение. Переходу в режим «слежение» предшествует переходный режим – «захват».
Обнаружитель контролирует преобразованный (импульсный) сигнал УНЧ и, если его уровень и спектральный состав соответствует допустимым значениям, замыкает кольцо слежения за частотой сигнала, отраженного от земной поверхности, подключив на вход управления выходной сигнал частотного дискриминатора.
В этом режиме управитель регулирует скорость перестройки модулятором частоты ПРД таким образом, чтобы среднее значение частоты разностного сигнала Fрср оставалось постоянным, равным переходной частоте дискриминатора Fр0 (которая приблизительно равна 30 кГц). При этом схема стабилизации (СС) девиации частоты Df, воздействуя на модулятор, поддерживает постоянство полосы модуляции ПРД и длительность импульсов Ти (формируемых схемой стабилизации), определяемая формулой:
 ,
,
где Тu - мера высоты Н.
В случае отсутствия на выходе УНЧ сигнала с нужными характеристиками (т.е. когда спектр сигнала разностной частоты и его средняя частота Fрср не совпадают с полосой пропускания УНЧ), обнаружитель организует поиск по частоте сигнала, отраженного от земной поверхности. При этом управитель периодически изменяет скорость перестройки частоты ПРД и усиление УНЧ от значений, соответствующих нулевой высоте, до соответствующих максимальной измеряемой высоте. При этом спектр сигнала разностной частоты перемещается по оси частот. Когда значительная часть мощности сигнала разностной частоты будет попадать в полосу пропускания УНЧ (которая формируется фильтрами верхних и нижних частот), то обнаружитель выдаст в преобразователь время-код (ПВК) и встроенную систему контроля (ВСК) сигнал «Захват», разрешающий обработку импульсов Ти с целью извлечения информации о высоте.
Для обеспечения постоянства девиации частоты (параметра РВ, влияющего на точность измерения высоты) служит блок высокодобротных резонаторов (БР), содержащий два резонатора. Один из них настроен на верхнюю частоту fн.в, другой – на нижнюю частоту fн.н. Разность частот настройки резонаторов определяет эталонную полосу частотной модуляции Df. При достижении частоты сигнала передатчика значений, близких к частотам настройки резонаторов, на их выходах образуются сигналы, которые поступают на схему стабилизации Df, где формируется измерительный интервал – импульс Тu, длительность которого определяется разностью времен срабатывания резонаторов.
ПВК преобразует длительность импульсов Тu в параллельный двоичный код, который в течение паузы между импульсами Тu передается в микропроцессорный вычислитель (МПВ), после чего микропроцессор производит установку нуля на выходе ПВК.
Микропроцессор в процессе работы выполняет следующие функции:
- после включения электропитания РВ загружает в оперативную память все необходимые константы и проводит самоконтроль;
- прием из ПВК измеренного текущего значения высоты и установленной остаточной высоты в параллельном двоичном коде;
- фильтрацию текущего значения высоты от ошибок, вызванных доплеровским смещением частоты. Усреднение результата по нескольким периодам модуляции передатчика для уменьшения методической погрешности измерений, не зависящей от уровня сигнала;
- вычисление текущего значения истинной высоты (вычитание остаточной высоты из измерений);
- обмен по прерыванию информацией с выходным преобразователем (ПКК) параллельного кода в последовательный трехуровневый;
- самоконтроль и проверку правильности функционирования ПКК.
ПКК собирает информацию, необходимую для формирования выходного 32-разрядного слова, соответствующим образом группируя ее, и передает на входы внешних устройств (индикатора высоты, САУ и др.).
ВСК собирает информацию мониторов, контролирующих состояние основных узлов радиовысотомера, и формирует соответствующие значения разрядов информационного слова, сигнализируя потребителям информации исправен радиовысотомер или нет, находится ли он в режиме измерения высоты или проводится контроль.
Кроме этого, приемопередатчик РВ обеспечивает выдачу информации об измеряемой высоте в виде постоянного напряжения, формируемого преобразователями длительности импульсов Тu в напряжения Uн1 и Uн2, а также разовые сигналы, которые схема выдачи разовых сигналов (СРС) выдает, как только аналоговое напряжение становится меньше значения соответствующего опорного напряжения.
ВСК контролирует также коэффициент пропорциональности между длительностью сигнала Тu и значением аналогового напряжения. Если все устройства приемопередатчика и антенны работают нормально, ВСК выдает сигнал «Исправность», а если при этом обнаружитель выдает сигнал «Захват», то выдается также сигнал «Разрешение использования информации».
Реле, управляемое сигналом «Исправность», подключает аналоговый сигнал высоты Вых. Нув к входу указателя высоты.
Как было указано выше для перевода радиовысотомера из режима поиска сигнала в режим слежения и обратно в блоке существует отдельное функциональное устройство - обнаружитель, решающее задачу обнаружения сигнала разностной частоты на фоне шумов тракта его приема и обработки. При этом задачу обнаружения сигнала целесообразно решать, анализируя сигналы на выходе дискриминатора и приемника.
В режиме поиска спектр сигнала разностной частоты не совпадает с частотой настройки дискриминатора и на выходе дискриминатора присутствуют только шумы. Обнаружитель должен иметь такие параметры, чтобы не происходило ложного обнаружения наличия сигнала по шумам на выходе дискриминатора (такое событие в теории оптимального обнаружения называется ложная тревога). В тоже время из-за наличия шумов обнаружитель может не определить факт наличия сигнала на выходе дискриминатора (такое событие в теории оптимального обнаружения называется пропуск цели) и радиовысотомер будет продолжать находиться в режиме поиска сигнала.
Таблица 1.1
| Техническая характеристика | РВ-3 | РВ-15 (А-031) | РВ-5М | РВ-85 |
| Диапазон измеряемых высот, м | 0...300 | 0...1500 | 0...750 | 0...1500 |
| Погрешность измерения высоты (2s), м | 1м, Н<10м 10%Н, Н>10 м | 0,6 м, Н<10 м 6%Н, Н>10 м | 0,6 м, Н<60 м 6%Н, | 0,45 м, Н<10 м 2%Н, Н>10 м |
| Средняя частота передатчика, МГц | ||||
| Девиация частоты, МГц | ||||
| Мощность передатчика, Вт | 0,5 | 0,1 | 0,15 | 0,5 |
| Чувствительность приемника, дБ/Вт | -90 | -85 | -87 | - |
| Масса, кг | 11,3 | 5,0 | 6,0 |
Дата добавления: 2020-02-05; просмотров: 1047;
Поиск по сайту
Узнать еще
- II. Бесполые способы размножения.
- III. Способы формирования фонда капитального ремонта
- А) Способы изображения пространственного строения энантиомеров
- Автоматический контроль точности размеров и формы деталей. Разновидности контроля. Использование информации, полученной при контроле,
- Автоматический метод достижения точности размеров
- Автоматическое ограничение повышения напряжения
- Автоматическое ограничение повышения частоты
- Административно - правовой и гражданско-правовой способы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
