Регулирование скорости изменением частоты тока питающей сети
Частотное регулирование на основе тиристорных преобразователей частоты все ши
ре применяется на судах мирового флота, особенно на специализированных – контейнеро-
возах, судах для транспортировки тяжеловесных грузов и т.п..
Этот вид регулирования – наиболее плавный и экономичный, с диапазоном регули-
рования до 12:1 и выше.
Изменение частоты тока питающей сети влияет на два важных параметра асинхрон
ного двигателя:
1. угловую скорость ω = 2πf  ( 1 – s ) / р;
( 1 – s ) / р;
2. критический ( максимальный ) момент двигателя М  = с
= с  .
.
Как следует из приведенных соотношений, при увеличении частоты тока угловая
скорость увеличивается прямо пропорционально частоте, а критический момент уменьша-
ется обратно пропорционально квадрату частоты, что может привести к опрокидыванию
асинхронного двигателя ( см. ниже ).
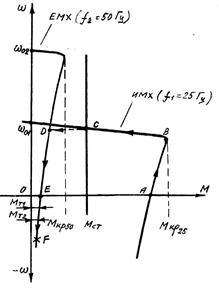
Рис. 245. Механические характеристики асинхронного двигателя при изменении частоты тока питающей сети: искусственная ( ИМХ ) при частоте f = 25 Гц;
естественная ( ЕМХ ) при частоте f  = 50 Гц
= 50 Гц
Рассмотрим регулирование скорости изменением частоты тока питающей сети от
значения f = 25 Гц до значения f = 50 Гц ( рис. 245 ).
Пусть двигатель работает в точке «С» на искусственной механической характери-
стике при частоте f = 25 Гц. Этой характеристике соответствует критический момент
М  и угловая скорость идеального холостого хода ω
и угловая скорость идеального холостого хода ω  .
.
При скачкообразном увеличении частоты тока в 2 раза, т.е. до значения f = 50 Гц ,
критический момент уменьшится в 4 раза ( М  = 0,25 М ), а угловая скорость иде-
= 0,25 М ), а угловая скорость иде-
ального холостого хода увеличится в 2 раза, до значения ω  .
.
При этом двигатель при постоянстве скорости перейдет из точки «С» в точку «D».
Этой точке соответствует электромагнитный момент, меньший тормозного статического М  . Поэтому двигатель станет тормозиться по участку «DE» характеристики, и в точке
. Поэтому двигатель станет тормозиться по участку «DE» характеристики, и в точке
«Е» остановится.
При реактивном статическом моменте ( насосы, вентиляторы и т.п. ) переходный процесс в точке «Е» закончится, т.е. двигатель после остановки ротора в точке «Е» оста
нется стоять под током.
При активном статическом моменте ( грузовые лебедки и краны, брашпиль ) пере-
ходный процесс в точке «Е» не закончится, двигатель после кратковременной остановки ротора в точке «Е» реверсирует и под действием статического момента М , созданного подвешенным грузом ( или судовым якорем ), станет разгоняться в обратном направле-
нии.
Привод перейдет в режим тормозного спуска, при котором электромагнитный мо-
мент двигателя направлен на подъем, а фактически происходит спуск груза ( якоря ).
При этом скорость спуска будет непрерывно увеличиваться, т.к. по мере разгона
привода значение тормозного электромагнитного момента двигателя непрерывно умень-
шается ( М  < М
< М  ). Если привод своевременно не остановить, произойдет авария.
). Если привод своевременно не остановить, произойдет авария.
Поэтому для электроприводов грузоподъемных и якорно-швартовных механизмов
при регулировании скорости одновременно, в равной степени, изменяют как частоту тока, так и напряжения питающей сети.
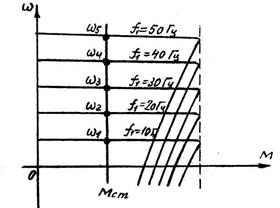
Рис. 246. Механические характеристики асинхронного двигателя при одновременном изменении частоты тока и напряжения питающей сети: естественная при частоте f = 50 Гц; искусственные при частотах f = 10, 20, 30 и 40 Гц
Тогда критический момент двигателя М = с = const ( cм. рис. 246 ), поэтому
нет опасности опрокидывания двигателя..
Особенности регулирования:
1. регулирование плавное, при помощи тиристорных преобразователей частоты;
2. при увеличении только частоты тока, например, в процессе разгона двигателя,
уменьшается критический момент, что может привести к опрокидыванию ТАД и аварии;
3. для грузоподъемных и якорно-швартовных механизмов при регулировании ско-
рости изменяют в одинаковой степени как частоту тока, так и напряжение.
Это позволяет сохранить постоянным критический момент двигателя и тем самым избежать опрокидывания привода.
Дата добавления: 2020-02-05; просмотров: 788;
Поиск по сайту
Узнать еще
- google_protectAndRun("ads_core.google_render_ad", google_handleError, google_render_ad); Великие географические открытия Запада и Востока ч.1
- А параметр этого потока
- А) Деградация почв и определение ее скорости
- Аварийные радиосети
- Автоматизация процесса назначения IP-адресов узлам сети - протокол DHCP
- Автоматизация процесса назначения IP-адресов узлам сети – протокол DHCP
- Автоматическая подстройка частоты
- Автоматическое ограничение повышения частоты

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
