Понятие об обратной связи
Автоматические системы в зависимости от выполняемой ими задачи могут быть разделены на системы автоматического контроля, автоматического управления и автоматического регулирования технологических процессов. Они представляют собой устройства, состоящие из различных звеньев. Автоматическая система может быть представлена в виде блок-схемы. Система реагирует на измерительный сигнал, поступающий от объекта контроля – детали – через обратную связь. Воспринимающими элементами измерительных систем для контроля размеров деталей являются измерительные стержни, измерительные губки, рычаги и др.
Простейшая блок-схема обратной связи: Станок — приспособление — инструмент — деталь.

Структурная схема системы автоматического регулирования с обратной связью.
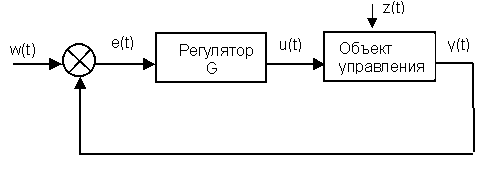
Здесь w(t) - алгоритм функционирования системы; u(t) - управляющее воздействие; z(t) - внешние возмущающие воздействия; y(t) - выходная переменная; e(t) = w(t) - y(t) - отклонение выходной переменной y(t) от желаемого значения w(t).
Выходной переменной может быть, например, скорость вращения обрабатываемой детали. Целью управления может быть изменение выходной переменной по заданному закону w(t). Для этого нужно свести к минимуму ошибку управления e(t).
Эта задача решается автоматическим регулятором G, который описывается законом регулирования u(t) = G[e(t)].
Выбор закона регулирования является основным звеном в процессе проектирования системы автоматического регулирования. Синтез оптимального регулятора, дающего максимальные показатели качества представляет собой сложную задачу. Однако во многих случаях для автоматизации производственных процессов могут быть использованы простейшие линейные регуляторы.
Задающий элемент служит для установки значения величины, характеризующей управляемый процесс, закона ее изменения или порядка воздействия на управляемый процесс. Задающими элементами автоматических измерительных систем являются, например, регулировочные винты неподвижных контактов преобразователей, определяющие предельные размеры контролируемой детали или заданную величину окончательного размера детали, обрабатываемой на станке, и др.
Элемент сравнения осуществляет сравнение величин воздействия, полученных от воспринимающего и задающего элементов, и передает сигнал на преобразующий элемент.
Преобразующий элемент осуществляет преобразование воздействия (сигнала), полученного от элемента сравнения и передает его на измерительный и исполнительный элементы. Преобразующим элементом системы, например, является электрическая цепь датчика, вырабатывающая сигнал о достижении деталью предельного или заданного размера.
Измерительный элемент воспринимает преобразованные воздействия контролируемого объекта и фиксирует числовые значения изменений контролируемой величины на показывающем, регистрирующем или цифровом отсчетном устройстве.
Исполнительный элемент воздействует на рабочие органы управляемого объекта, осуществляя конечное преобразование энергии, получаемой от преобразующего элемента.
Таким образом, реализуется система активного контроля с автоматической подналадкой станка выполняет задачу регулирования процесса. Контролируется размер обработанной детали и в зависимости от его значения, при необходимости, путем передачи воздействий от исполнительного элемента на корректирующий блок осуществляется подналадка станка. Функциональная блок-схема такой системы имеет замкнутую цепь воздействий с обратной связью и является схемой простой системы автоматического регулирования по отклонению размера.

Дата добавления: 2016-06-15; просмотров: 2418;
Поиск по сайту
Узнать еще
- I. Выборы: понятие, значение и виды.
- I. Политический режим: понятие, сущность и основные типы.
- I. Понятие и типы политических партий.
- I. Понятие политического лидерства.
- I. Понятие политической власти.
- I. Понятие, происхождение и признаки государства.
- II. Обратная аффирентная связь. Понятие о РК.
- II. Понятие и виды элиты.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
