ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока находят широкое применение в электроприводах механизмов, где требуется широкое изменение частоты вращения. Как уже отмечалось, они используются в металлургической промышленности, станкостроении, системах автоматического регулирования, на электрическом транспорте, в авиации и автомобилестроении. Двигатели постоянного тока могут иметь мощность в пределах от нескольких ватт до нескольких тысяч киловатт. Двигатели постоянного тока классифицируют по способу включения обмотки возбуждения. Различают двигатели независимого, параллельного, последовательного и смешанного возбуждения. Электрические схемы этих двигателей аналогичны схемам соответствующих генераторов. В отличие от генератора, и ток якоря, и ток возбуждения в двигателях постоянного тока потребляется из сети.
Двигатель постоянного тока параллельного возбуждения. На рис. 6.1 представлена схема включения в сеть двигателя постоянного тока параллельного возбуждения.
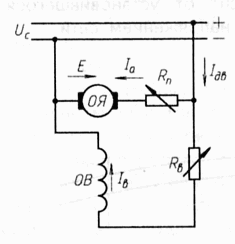
Рис. 6.1. Схема включения двигателя параллельного возбуждения в сеть
Обычно мощность сети постоянного тока много больше мощности двигателя, так что напряжение сети неизменно. Тогда обмотку параллельного возбуждения можно представить и как обмотку независимого возбуждения. Отметим, что в цепь якоря машин небольшой мощности (единицы кВт) обычно включают пусковое сопротивление RП, ограничивающее ток якоря в момент его включения в сеть.
Таким образом, ток двигателя IДВ будет складываться из тока якоря и тока возбуждения:
IДВ=Ia + IВ (6.1)
Поскольку ток возбуждения составляет 3...5% тока якоря, то иногда для практических расчетов принимают ток двигателя равным току якоря. Ток в цепи якоря будет определяться разностью напряжения сети и ЭДС якоря и сопротивлением якорной цепи:
1а = (U-E)/(Rа+ RП). (6.2)
Этот ток, взаимодействуя с магнитным полем машины, будет создавать вращающий электромагнитный момент, потребляя из сети мощность
P1 = U(Ia + IВ). (6.3)
Мощность P1,подводимая из сети, делится между цепью якоря Ра и цепью возбуждения РВ. Небольшая часть мощности, потребляемой цепью якоря, затрачивается на нагревание обмотки якоря РЭЛ. Остальная часть преобразуется в механическую мощность РМЕХ. Механическая мощность идет на покрытие мощности потерь в стали РС и мощности механических потерь РМП на трение в подшипниках, щеток на коллекторе и вентиляционные потери. Энергетическая диаграмма двигателя приведена на рис. 6.2.
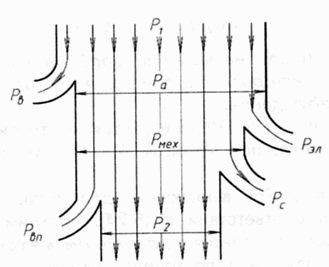
Рис. 6.2. Энергетическая диаграмма двигателя постоянного тока
Поскольку ЭДС Е в двигателе имеет направление, противоположное направлению тока якоря, то ее принято называть противоэлектродвижущей силой (противоЭДС). Она, как и ЭДС генератора, зависит от конструктивной постоянной машины СЕ, потока главных полюсов и частоты вращения n якоря:
Е= СЕ Ф n. (6.4)
Напряжение на зажимах якоря:
U=1а (Rа+ RП) + E (6.5)
Двигатель при подключении в сеть вращается и развивает на валу вращающий момент:
M= СМФ1а. (6.6)
Этот момент уравновешивает статический момент (момент сопротивления) на валу двигателя.
С учетом (6.4), уравнение баланса напряжений на якоре (6.5) примет вид:
U=1а (Rа+ RП) + СЕ Ф n, (6.7)
откуда можно получить зависимость частоты вращения от тока якоря:
n= (U- 1а (Rа+ RП))/СЕ Ф. (6.8)
Выражение (6.8) называется уравнением электромеханической характеристики двигателя постоянного тока независимого возбуждения.
При токе якоря равном нулю n=n0= U/СЕ Ф. Величина n0 называется частотой идеального холостого двигателя. При n=n0 Е = U.
Подставив в (6.8) выражение для тока, выраженного через момент в соответствии с (6.6), получим зависимость n = f(M), которая называется уравнением механической характеристики двигателя постоянного тока:
n= U/ СЕ Ф - M (Rа+ RП)/СЕ СМФ2. (6.9)
При неизменных значениях напряжения, магнитного потока и сопротивления якорной цепи механическая характеристика (6.9) представляет собой уравнение прямой линии (рис. 6.3,а).
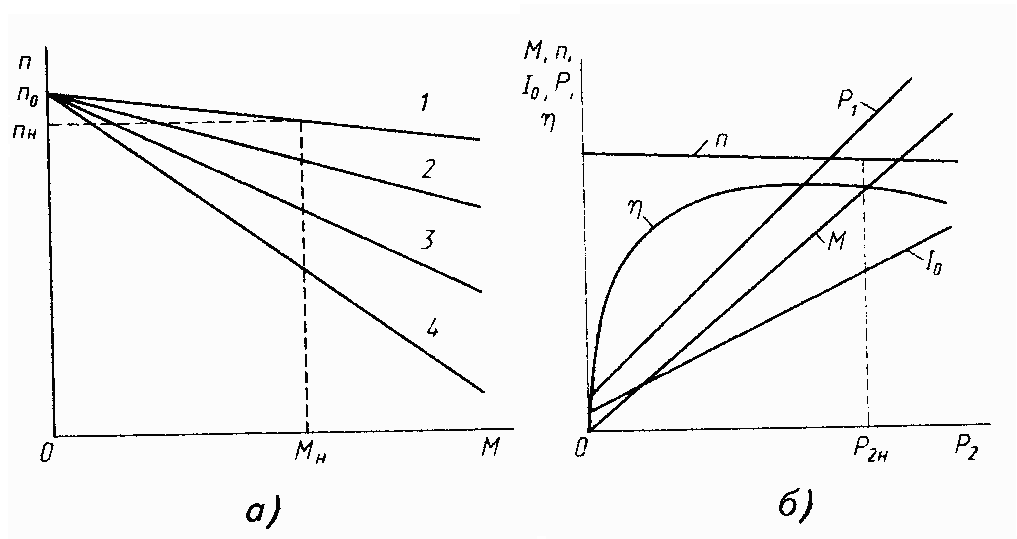
Рис. 6.3. Механические (а) и рабочие (6) характеристики двигателя постоянного тока с параллельным возбуждением
Величина Δn=(Rа+ RП)/СЕ СМФ2, зависящая от суммы сопротивлений Rа+ RП,определяет наклон механической характеристики к оси абсцисс. При отсутствии в цепи якоря добавочного сопротивления RП, и номинальном токе возбуждения механическая характеристика двигателя называется естественной характеристикой (1 на рис. 6.3, а). Номинальному моменту МН на естественной характеристике соответствует номинальная частота вращения nН. При включении добавочного реостата угол наклона этих характеристик возрастает тем больше, чем больше величина сопротивления, вследствие чего формируется семейство реостатных характеристик 2, 3, 4. Это позволяет получить новые значения частот вращения.
Реакция якоря, уменьшая несколько поток машины Ф при нагрузке, стремится придать естественной механической характеристике отрицательный угол наклона, при котором частота вращения n возрастает с увеличением момента М. Однако двигатель с такой характеристикой в большинстве электроприводов устойчиво работать не может. Поэтому современные мощные двигатели с параллельным возбуждением часто снабжают небольшой последовательной обмоткой возбуждения, которая придает механической характеристике необходимый наклон. МДС этой обмотки при номинальном токе составляет около 10% от МДС параллельной обмотки.
Регулировочный реостат RВ позволяет изменять ток возбуждения двигателя и его магнитный поток. При этом, как следует из (6.9), будет изменяться и частота вращения, причем будет возрастать и частота вращения идеального холостого хода. При номинальном напряжении на якоре (RП=0) и уменьшении магнитного потока (RВ >0) характеристики проходят тем выше естественной и круче ее, чем меньше магнитный поток. Однако существенное уменьшение магнитного потока не допускается, поскольку частота вращения двигателя резко возрастает (двигатель идет «вразнос»). При этом сильно увеличивается ток якоря и может возникнуть круговой огонь. Таким образом, обрыв цепи возбуждения крайне опасен.
Рабочие характеристики двигателя представляют собой зависимости потребляемой мощности Р1,тока якоря 1а,частоты вращения n, момента M и КПД η от мощности на валу двигателя Р2 при неизменных напряжении и токе возбуждения (U = const и 1В= const). Характеристики частоты вращения и момента являются линейными, а зависимости КПД, тока и мощности имеют характер, общий для всех электрических машин. Если в двигателе, обмотка якоря и обмотка возбуждения подключены к источникам питания с различными напряжениями, та его называют двигателем с независимым возбуждением. Механические и рабочие характеристики двигателя с независимым возбуждением аналогичны характеристикам двигателя с параллельным возбуждением, поскольку у них ток возбуждения не зависит от тока якоря.
Двигатель постоянного тока последовательного возбуждения. В этом двигателе обмотка возбуждения соединяется последовательно с обмоткой якоря, ток возбуждения равен току якоря 1В=1а , поэтому магнитный поток Ф является функцией тока якоря. Если ток якоря 1а < (0,8…0,9) IН, магнитная система машины не насыщена, магнитный поток пропорционален току якоря: Ф = kФ 1а . Коэффициент пропорциональности kФв большом диапазоне нагрузок остается практически постоянным. При дальнейшем возрастании тока якоря поток Ф растет медленнее, чем ток якоря. Таким образом, магнитный поток машины зависит от тока якоря, причем зависимость эта нелинейная. В соответствии с этим изменяются и характеристики двигателя.
Схема подключения к сети двигателя последовательного возбуждения с добавочным пусковым сопротивлением RП представлены на рис. 6.4, а.
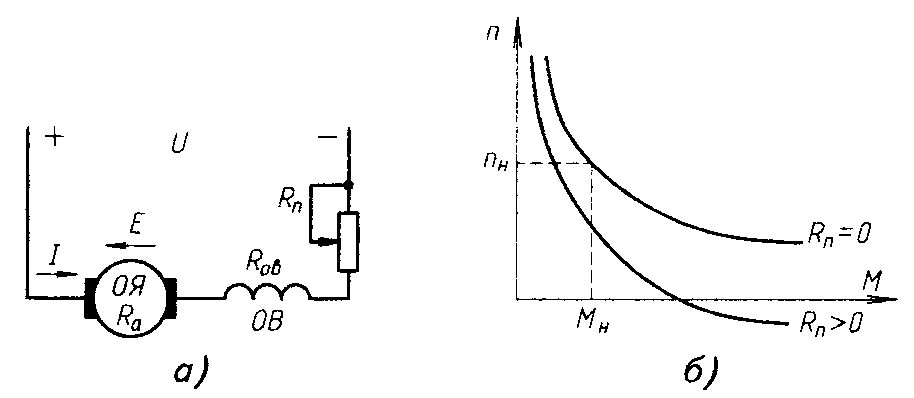
Рис. 6.4. Схема включения (а) и механические характеристики (б) двигателя постоянного тока последовательного возбуждения
Уравнение механической характеристики имеет вид:
n= U/ СЕ kФ 1а - M (Rа+ RП+ RВ)/СЕ СМ (kФ 1а)2 . (6.10)
Так как М= СМ Ф1а= СМ kФ 1а2, то выразив ток якоря через момент и подставив его в (6.10), получим:
n= U/ (kМ √М)-(Rа+ RП+ RВ)/kМ2 (6.11)
где kМ=√СМ.
Механическая характеристика двигателя мягкая, имеет форму гиперболы, асимптотически приближающуюся к оси частот вращения (рис. 6.4,б). Это означает, что при холостом ходе или малых нагрузках на валу частота вращения двигателя резко возрастает до недопустимых значений, двигатель идет «вразнос». Поэтому минимальная нагрузка такого двигателя должна быть не менее 20...30% номинальной.
Дата добавления: 2017-11-21; просмотров: 4068;
Поиск по сайту
Узнать еще
- I. Способы представления переменного синусоидального тока и напряжения.
- I. Установка для исследования сдвига фаз колебаний силы тока и напряжения с помощью компьютера и осциллографа-приставки
- II. Политическая карта Востока к началу XVII в.
- III. Периоды колонизации стран Востока
- IV. Расчёт простых цепей постоянного тока методом эквивалентных преобразований сопротивлений.
- RLC-контур с параллельным соединением элементов в цепи переменного тока.
- V-образные бензиновые двигатели KIA
- Авиационные двигатели.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
