Регулирование скорости двигателя постоянного тока с независимым возбуждением
5.3.1. Преобразовательные устройства, применяемые при регулировании скорости двигателей
Как было рассмотрено выше, регулирование скорости возможно различными способами: изменением напряжения на якоре двигателя, изменением сопротивления в цепи якоря, изменением напряжения на обмотке возбуждения двигателя. Реостатное регулирование является не экономичным и по возможности используются другие, более экономичные способы регулирования скорости.
Регулирование скорости возможно при использовании преобразовательных устройств, которые позволяют изменять параметры энергии на своем выходе. Например, преобразователи для ДПТ позволяют менять значение напряжения на выходе, преобразователи для АД, кроме того, могут изменять частоту выходного напряжения. Первоначально в качестве управляемых преобразователей (управляемых выпрямителей для ДПТ) применяли электромашинные преобразователи. Такой преобразователь состоит из механически соединённых друг с другом АД и генератора постоянного тока независимого возбуждения. В настоящее время в связи с бурным развитием полупроводниковой техники ЭМП не используются ввиду экономической нецелесообразности.
Полупроводниковые преобразователи в настоящее время принято разделять на неуправляемые выпрямители (например, для питания обмотки возбуждения двигателя в однозонных САР), управляемые выпрямители, позволяющие изменять на выходе среднее значение напряжения; непосредственные преобразователи частоты, изменяющие частоту первой гармоники; частотные преобразователи, частота и напряжение на выходе которых меняется по какому-либо закону частотного управления.
5.3.2. Система генератор-двигатель
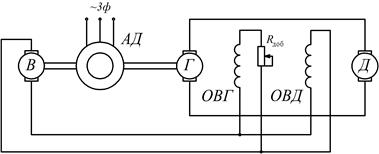
Рассмотрим основные свойства системы генератор-двигатель (Г-Д). Принципиальная схема системы Г-Д представлена на рис. 5.5. Она состоит из приводного двигателя Д (асинхронный или синхронный двигатель), который механически связан с генератором постоянного тока Г. Величина ЭДС генератора регулируется путем изменения напряжения на обмотке возбуждения генератора. Якоря генератора и двигателя электрически связаны друг с другом. Регулируемым параметром в данном случае выступает величина ЭДС двигателя. Для обеспечения магнитного потока в двигателе и генераторе используется возбудитель, который представляет собой ДПТ меньшей мощности  . В настоящее время в качестве возбудителей используются полупроводниковые преобразователи.
. В настоящее время в качестве возбудителей используются полупроводниковые преобразователи.
| 
|
| Рис. 5.5. Принципиальная схема системы Г-Д | Рис. 5.6. Механические характеристики системы Г-Д |
Из уравнения равновесия напряжений по второму закону Ома можно составить уравнение ЭДС
 ,
,
где  – ЭДС генератора,
– ЭДС генератора,  – сопротивления якоря генератора.
– сопротивления якоря генератора.
Подставив в это уравнение значения ЭДС  и тока двигателя
и тока двигателя  , можно найти уравнение механической характеристики системы Г-Д:
, можно найти уравнение механической характеристики системы Г-Д:
 .
.
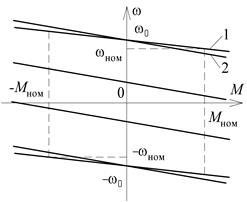
Вид механических характеристик представлен на рис. 5.6. Анализируя полученное уравнение МХ для системы ГД, можно заключить, что относительное падение напряжения в этой системе в вдвое выше (прямая 2 на рис. 5.6), чем у естественной характеристики двигателя (прямая 1 на рис 5.6). Обуславливается это наличием сопротивления генератора, которое примерно равно сопротивлению якоря двигателя, так как машины примерно одинаковой мощности.
Основным достоинством данного способа регулирования является высокая плавность регулирования скорости двигателя.
К недостаткам можно отнести следующее: в системе Г-Д происходит двукратное преобразование энергии: в приводном двигателе из электрическую в механическую, в генераторе из механической в электрическую, а также непосредственно в самом двигателе из электрической в механическую. Так как каждое устройство обладает своим КПД, становится очевидно, что в данной системе общий КДП, равный произведению КПД всех входящих в систему преобразовательный устройств  , не может иметь высокого значения.
, не может иметь высокого значения.
Кроме того, при работе ЭМП возникает дополнительный шум, ухудшающий условия работы персонала, повышаются расходы на обслуживание, а сама система обладает повышенными массогабаритными показателями, так как мощность приводного двигателя и генератора должны быть немного больше мощности двигателя. Ввиду указанных недостатков в настоящее время данная система вытеснена более совершенной системой регулирования скорости, называемой тиристорный преобразователь-двигатель (ТП-Д).
5.3.3. Система тиристорный преобразователь-двигатель
Развитие силовой электроники позволило создать и успешно развивать статические преобразователи, преобразующие переменное напряжение в регулируемое постоянное.
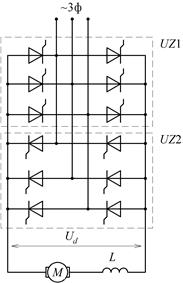
Изменение величины постоянного напряжения осуществляется регулированием угла открывания вентилей в проводящей части переменного напряжения. Выпрямленное напряжение содержит постоянную  и переменную составляющие. Наличие пульсаций выпрямленного напряжения ухудшает условия коммутации двигателей и увеличивает потери в них, поэтому на выходе выпрямителя часто устанавливают фильтр, представляющий собой реактор, включаемый последовательно с цепью якоря и обладающий таким реактивным сопротивлением, которое позволяет обеспечить допустимый уровень пульсаций тока в якоре двигателя. Другим средством уменьшения пульсаций является использование схем повышенной пульсности, что позволяет значительно уменьшить пульсации тока выпрямленного напряжения и тока, однако требует больших затрат на оборудование. Схема реверсивного ТП представлена на рис. 5.7.
и переменную составляющие. Наличие пульсаций выпрямленного напряжения ухудшает условия коммутации двигателей и увеличивает потери в них, поэтому на выходе выпрямителя часто устанавливают фильтр, представляющий собой реактор, включаемый последовательно с цепью якоря и обладающий таким реактивным сопротивлением, которое позволяет обеспечить допустимый уровень пульсаций тока в якоре двигателя. Другим средством уменьшения пульсаций является использование схем повышенной пульсности, что позволяет значительно уменьшить пульсации тока выпрямленного напряжения и тока, однако требует больших затрат на оборудование. Схема реверсивного ТП представлена на рис. 5.7.
Уравнение электромеханической характеристики для системы ТП-Д имеет следующий вид:
 ,
,
где  – среднее значение выпрямленного напряжения при холостом ходе выпрямителя и полностью открытых тиристорах (
– среднее значение выпрямленного напряжения при холостом ходе выпрямителя и полностью открытых тиристорах (  );
);  – действующее значений переменного напряжения;
– действующее значений переменного напряжения;  – число фаз выпрямителя;
– число фаз выпрямителя;  - эквивалентное сопротивление якорной цепи;
- эквивалентное сопротивление якорной цепи;  – активное и реактивное сопротивления трансформатора;
– активное и реактивное сопротивления трансформатора;  - активное сопротивление сглаживающего реактора.
- активное сопротивление сглаживающего реактора.
Механическую характеристику системы ТП-Д можно получить из электромеханической, выразив значение тока через момент двигателя,
 .
.
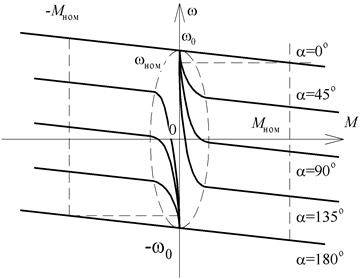
Вид МХ представлен на рис. 5.8. Характеристики имеют меньшую жесткость по сравнению с естественной МХ за счет дополнительных сопротивлений в якорной цепи. При различных углах включения наклон характеристик остаётся неизменным.
Характеристики системы ТП-Д с раздельным управлением комплектами в зоне малых нагрузок являются нелинейными. Нелинейность характеристик приводит к наличию дополнительных звеньев в системах регулирования, призванных выполнить линеаризацию МХ системы.
При наличии двух комплектов мостов ТП появляется возможность рекуперации энергии в сеть. Более того, такие преобразователи обладают бо’льшим быстродействием. Коэффициент полезного действия ТП составляет 0,9-0,94 для мощностей порядка 50-100 кВт, что существенно превосходит КПД системы Г-Д.
Таким образом, к достоинствам системы ТП-Д можно отнести широкий диапазон регулирования скорости, жесткость МХ, высокий КПД, небольшие массогабаритные показатели и невысокие эксплуатационные расходы, высокая надежность, более высокое быстродействие в сравнении с системой Г-Д.
Недостатком таких систем являются пульсации выпрямленного напряжения, снижение коэффициента мощности, обусловленное уменьшением угла управления тиристорами. Приближенно считают, что  .
.
В настоящее время система ТП-Д является основным видом регулируемого электропривода постоянного тока, применяемым в широком диапазоне мощностей: от привода металлорежущих станков до привода крупных прокатных станов.
| 
|
| Рис. 5.7. Схема реверсивного ЭП системы ТП-Д | Рис. 5.8. Механические характеристики системы ТП-Д |
Дата добавления: 2017-11-21; просмотров: 1862;
Поиск по сайту
Узнать еще
- I. Двигатель параллельным возбуждением
- I. Способы представления переменного синусоидального тока и напряжения.
- I. Установка для исследования сдвига фаз колебаний силы тока и напряжения с помощью компьютера и осциллографа-приставки
- I.5.3 КОСМИЧЕСКИЕ СКОРОСТИ
- II. Политическая карта Востока к началу XVII в.
- III. Периоды колонизации стран Востока
- III. Схема замещения и векторная диаграмма асинхронного двигателя
- IV. Расчёт простых цепей постоянного тока методом эквивалентных преобразований сопротивлений.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
