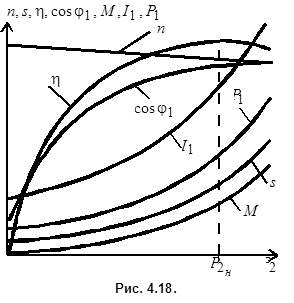
Рабочие характеристики асинхронного двигателя
Рабочими характеристиками называются зависимости частоты вращения n (или скольжения s), момента на валу М, тока статора  , КПД и
, КПД и  от полезной мощности
от полезной мощности  при
при  и
и  .
.
Рабочие характеристики можно получить опытным либо расчетным путем. Ниже приводится алгоритм расчета рабочих характеристик по схеме замещения. Задается скольжение s в рабочем диапазоне  . Для каждого значения s внутри этого диапазона рассчитываются следующие величины.
. Для каждого значения s внутри этого диапазона рассчитываются следующие величины.
1. Ток обмотки ротора и его фаза
 ;
;
 .
.
2. Ток намагничивания и его фаза
 ;
;
 .
.
3. Ток обмотки статора
 .
.
4. Потери
 .
.
Потери  принимаются постоянными, а потери
принимаются постоянными, а потери  зависят от тока нагрузки.
зависят от тока нагрузки.
|
5. Электромагнитный момент
 .
.
6. Полезная мощность на валу
 .
.
Потери  определяются из опыта холостого хода, а добавочные рассчитываются приближенно
определяются из опыта холостого хода, а добавочные рассчитываются приближенно  .
.
7. Потребляемая двигателем мощность
 .
.
8. Коэффициент мощности
 .
.
9. Коэффициент полезного действия
 .
.
Примерный вид рабочих характеристик показан на рис. 4.18. Асинхронные двигатели обладают достаточно жесткой скоростной характеристикой  . При переходе от холостого хода к режиму номинальной нагрузки скольжение возрастает незначительно (до 2-5%). С ростом нагрузки монотонно увеличиваются ток статора, потребляемая мощность и электромагнитный момент . КПД имеет максимум в зоне
. При переходе от холостого хода к режиму номинальной нагрузки скольжение возрастает незначительно (до 2-5%). С ростом нагрузки монотонно увеличиваются ток статора, потребляемая мощность и электромагнитный момент . КПД имеет максимум в зоне  , где потери постоянные
, где потери постоянные  равны потерям переменным
равны потерям переменным  . Коэффициент мощности в режиме холостого хода мал, обычно не более 0,2. С увеличением нагрузки
. Коэффициент мощности в режиме холостого хода мал, обычно не более 0,2. С увеличением нагрузки  потребляемая реактивная мощность меняется незначительно, поэтому
потребляемая реактивная мощность меняется незначительно, поэтому  растет, достигая значений
растет, достигая значений  для двигателей средней и большой мощности.
для двигателей средней и большой мощности.
4.9. Асинхронные короткозамкнутые двигатели с
улучшенными пусковыми свойствами
|
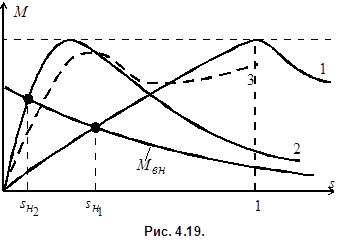
Многие электроприводы для достижения высокого быстродействия и надежности запуска требуют повышенного пускового момента, близкого к максимальному. Этой цели можно достичь, выполнив обмотку ротора с повышенным активным сопротивлением (кривая 1 рис. 4.19). Однако рабочая ветвь механической характеристики такого двигателя оказывается весьма «мягкой», поэтому в номинальном режиме двигатель будет работать с большим скольжением, что связано со значительными потерями и низкими энергетическими показателями. Для достижения высоких энергетических показателей желательно иметь «жесткую» механическую характеристику (кривая 2 рис. 4.19). Получить механическую характеристику, сочетающую положительные свойства характеристик 1 и 2, можно, если использовать поверхностный эффект в стержнях роторной обмотки для повышения активного сопротивления обмотки в начале пуска, когда частота тока в роторе  близка к частоте сети. По мере разгона двигателя частота тока в роторе падает, поверхностный эффект ослабляется и сопротивление ротора снижается. Вид механической характеристики такого двигателя представлен кривой 3 на рис. 4.19. Существует несколько конструктивных решений, обеспечивающих использование поверхностного эффекта.
близка к частоте сети. По мере разгона двигателя частота тока в роторе падает, поверхностный эффект ослабляется и сопротивление ротора снижается. Вид механической характеристики такого двигателя представлен кривой 3 на рис. 4.19. Существует несколько конструктивных решений, обеспечивающих использование поверхностного эффекта.
Дата добавления: 2017-11-21; просмотров: 2331;
Поиск по сайту
Узнать еще
- II. Физические характеристики участников коммуникации
- III. Схема замещения и векторная диаграмма асинхронного двигателя
- U – образные и рабочие характеристики синхронного двигателя
- U – образные характеристики синхронного генератора
- U-образные характеристики
- VII. Регулирование частоты вращения двигателя
- XIII. ЭНЕРГЕТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ОБОРУДОВАНИЯ
- Амплитудо-частотная и фазо - частотная характеристики усилителя .

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
