Особенности конструкции и работы реальных машин постоянного тока.
В настоящее время МПТ изготовляются на мощности от долей ватт до десятков мегаватт. Частота их вращения колеблется от нескольких оборотов до нескольких тысяч оборотов в минуту, а номинальное напряжение их доходит до 1500-3000 В. В основном МПТ в электроприводе используются как двигатели, однако в ряде случаев находят применение и генераторы в качестве индивидуальных источников питания в регулируемых электроприводах.
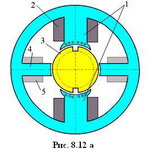
Основной магнитный поток в реальных МПТ создается главными полюсами 1 (см. рис. 8.12 а), являющимися частью неподвижного ферромагнитного магнитопровода – станины. На них располагается обмотка возбуждения 2. Для более равномерного распределения потока в воздушном зазоре машины главные полюса имеют полюсные наконечники специальной формы. В машинах относительно большой мощности на полюсных наконечниках делают пазы, в которые укладывают специальную обмотку, называемую компенсационной обмоткой (ее назначение будет пояснено ниже).
| ||
Рис. 8.12 а
| Рис. 8.12 б | Рис. 8.12 в |
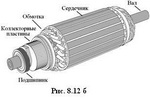
Подвижная часть МПТ – цилиндрический якорь 3 (в собранном виде он показан на рис. 8.12 б) набирается из листов электротехнической стали. На внешней поверхности он имеет пазы, в которые в два слоя укладывается якорная обмотка, состоящая из отдельных секций. Активные части каждой секции располагаются в двух пазах под разными полюсами, причем одну сторону секции укладывают в верхнем слое паза, а другую – в нижнем. По способу соединения секций между собой обмотки якорей делятся на петлевые, волновые и комбинированные. Принцип выполнения наиболее простой – петлевой обмотки – на примере двух соседних секций показан на рис. 8.13 а. Различают диаметральные обмотки, у которых расстояние между активными (расположенными в пазах) сторонами одного витка равно полюсному делению и укороченные, у которых оно меньше полюсного деления.
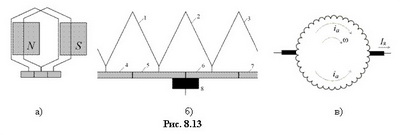
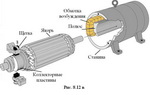
Выводы якорной обмотки присоединяются к коллекторным пластинам, вращающимся вместе с якорем. Щетки, располагаемые в специальных щеткодержателях (рис. 8.12 в), для улучшения электрического контакта плотно прижаты к коллекторным пластинам. Независимо от способа выполнения якорной обмотки, общий принцип подключения ее секций к коллекторным пластинам можно условно изобразить, как на рис. 8.13,б, где он показан для трех соседних секций, обозначенных 1, 2, 3 и четырех соседних коллекторных пластин, обозначенных 4, 5, 6, 7, соответственно. На рис. 8.13 б также условно показана щетка 8, относительно которой перемещаются коллекторные пластины.
Как видно, секции обмотки через коллекторные пластины соединяются последовательно, образуя кольцо. Таким образом, якорную обмотку МПТ можно схематически изобразить в виде замкнутой спирали, по поверхности которой скользят щетки (см. рис. 8.13 в). Щетки делят последовательно соединенные секции обмотки на параллельные ветви, как это видно из рис. 8.13 в где обмотка имеет одну пару (а=1) параллельных ветвей. В общем случае а=1,2,3,4… В симметричной обмотке сопротивления и токи всех параллельных ветвей равны между собой.
При перемещении пластин коллектора относительно щеток секции поочередно переходят из одной параллельной ветви в другую. Этот процесс, называемый коммутацией, приводит к поочередному изменению направления тока в секциях.
Более детально процесс коммутации можно проиллюстрировать на упрощенном варианте МПТ с четырехсекционной обмоткой на якоре и, соответственно, с четырьмя коллекторными пластинами. На рис. 8.14 а, рис. 8.15 а и рис. 8.16 а показано три последовательных характерных положения якоря относительно полюсов. Рис. 8.14 б, рис. 8.15 б и рис. 8.16 б, соответственно, условно показывают расположение секций якорной обмотки относительно щеток в этих положениях, а на рис. 8.14 в, рис. 8.15 в и рис. 8.16 в представлены эквивалентные электрические схемы якорной обмотки в этих же положениях якоря.
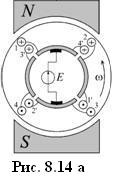
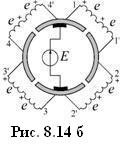
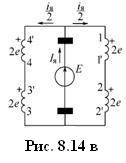
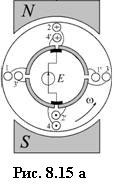
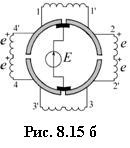
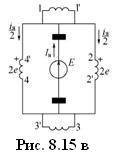

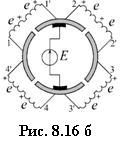
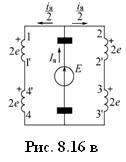
Как видно из рис. 8.15,а,б,в, в процессе перехода секций 1 и 3 из одной параллельной ветви в другую в течении некоторого интервала времени они оказываются закороченными через щетки (также, как и секция 2 на рис. 8.13,б). Чтобы короткое замыкание секций не вызывало чрезмерного увеличения тока в них, щетки стремятся располагать около геометрической нейтрали (на одинаковом расстоянии между соседними полюсами). В этом случае ЭДС, наводимая в секции при ее замыкании, минимальна. Однако, даже в этом случае в короткозамкнутой секции под действием этой ЭДС могут возникать чрезмерные токи, приводящие к искрению под щетками. Это ограничивает работоспособность щеточно-коллекторного узла. Наиболее опасен круговой огонь, охватывающий весь коллектор. Это приводит к оплавлению коллектора и выходу машины из строя.
Обратим внимание также на то, что в момент замыкания секции через щетку накоротко уменьшается суммарная ЭДС параллельных ветвей. Так в рассматриваемом выше примере МПТ с четырехсекционным якорем при его вращении ЭДС периодически уменьшается в два раза. В результате возникают пульсации мгновенной ЭДС якоря. Очевидно, амплитуда этих пульсаций снижается, а частота, наоборот, возрастает по мере увеличения числа секций якорной обмотки. Поскольку реально число секций якорной обмотки значительно больше четырех, поэтому пульсациями ЭДС, тока и т.п. вызванными коммутацией тока в якорной обмотке, обычно пренебрегают.
Для улучшения условий коммутации МПТ используются дополнительные полюса 4 на рис. 8.12 с соответствующей обмоткой, которые располагаются между главными полюсами. Поле, создаваемое дополнительными полюсами, снижает интенсивность поля в зоне коммутации, в результате чего снижается уровень наводимой в коммутируемой секции ЭДС и улучшается работа коллектора.
Для этого за главным полюсом данной полярности по направлению вращения МПТ в режиме генератора должен следовать добавочный полюс противоположной полярности, а в режиме двигателя – добавочный полюс той же полярности. Обмотка дополнительных полюсов включается последовательно с якорной обмоткой. В качестве дополнительных средств улучшения коммутации могут использоваться укорочение шага якорной обмотки, сдвиг щеток с геометрической нейтрали, а также применение щеток со специальными характеристиками.
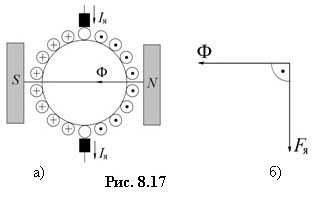
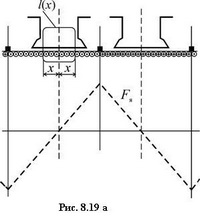
На рис. 8.17 показана МПТ с одной парой полюсов. В зависимости от мощности и назначения МПТ может иметь несколько пар главных полюсов. Тогда, соответственно, увеличивается количество дополнительных полюсов и щеток. Щетки всегда устанавливают таким образом, чтобы МДС обмотки якоря Fя действовала в направлении, перпендикулярном оси поля возбуждения (рис 8.17,а). Это положение щеток позволяет получить наибольший момент. Машина постоянного тока наглядно иллюстрирует принцип взаимно - перпендикулярных полей. Если рассматривать машину с точки зрения неподвижного наблюдателя, то главные полюса также неподвижны. В пространстве между ними находятся полюса от тока якоря, создающие перпендикулярное поле. Угол относительного смещения полей называется углом момента. В идеализированной МПТ он равен 90°, как это показано на векторной диаграмме на рис. 8.17,б.
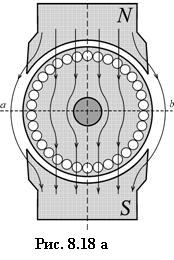
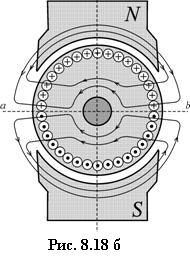
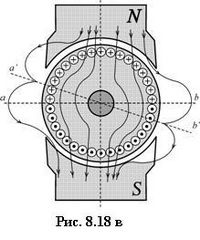
Необходимо однако отметить, что реально результирующий магнитный поток в воздушном зазоре МПТ создается не только главными полюсами, но и якорной обмоткой. На рис. 8.18,а и рис. 8.18,б условно показаны пути замыкания магнитных потоков, создаваемых в отдельности главными полюсами и якорной обмоткой, соответственно. Полярность полюсов и направления токов якоря показаны для случая вращения якоря в направлении по часовой стрелке в генераторном режиме и против часовой – в двигательном режиме работы машины. Взаимодействуя, поля якоря и возбуждения создают результирующее поле, характер которого условно показан на рис. 8.18,в. Как видно, под действием поля якоря результирующее поле изменяется, в результате чего ось симметрии результирующего поля a’b’ смещается на некоторый угол по отношению к оси симметрии машины ab. Влияние поля якоря на результирующее поле МПТ называется реакцией якоря. При расположении щеток на геометрической нейтрали (на линии ab) реакция якоря поперечная, поскольку ось поля якоря перпендикулярна оси основного поля.
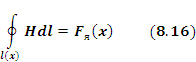
Для пояснения влияния реакции якоря на свойства МПТ рассмотрим это явление подробнее. Распределение поля в воздушном зазоре машины от тока якоря можно определить, рассмотрев упрощенный фрагмент линейной развертки её поперечного сечения с указанием направлений токов в обмотках якоря, как показано на рис. 8.19,а. На основании закона Ампера для любого замкнутого контура l(x), охватывающего проводники с током, имеем:
где x – текущая линейная координата.
В простейшем случае при бесконечно большой магнитной проницаемости магнитопровода можно считать, что в любой точке воздушного зазора левая часть интеграла в (8.16) равна произведению радиального размера зазора ld на напряженность магнитного поля в воздушном зазоре Hd. Правая же часть выражения (8.16) для различных контуров интегрирования, зависит от количества проводников, находящихся внутри контура интегрирования. При линейном распределении проводников по поверхности якоря число проводников, приходящееся на единицу длины окружности якоря, называемое обычно линейной нагрузкой, можно определить как:
где Ia – ток в проводниках, N – число проводников, D – диаметр якоря. Если поместить начало отсчета на ось симметрии полюса (см. рис. 8.19), МДС от тока якоря в точке, расположенной на расстоянии x от начала отсчета, может быть определена как:

Как видно, при достаточно большом числе проводников якорной обмотки можно считать, что создаваемая ею МДС вдоль окружности якоря распределена линейно. При этом максимум МДС приходится на геометрическую нейтраль, где установлены щетки.
| 
|
Примерное распределение индукции от якорной обмотки Вя показано на рис. 8.19,б. Заметим, что кривая Вя практически повторяет по форме Fя за исключением межполюсных промежутков, где ее снижение есть следствие увеличения воздушного зазора. С учетом распределения магнитной индукции поля возбуждения Вв, картина распределения результирующей индукции в зазоре машины ВΣ наиболее просто находится при отсутствии насыщения – суммированием ординат кривых Вя и Вв (см. рис. 8.19,б). Как видно, при нагрузке происходит искажение магнитного поля по отношению к режиму холостого хода. Под одним краем полюса оно ослабляется, под другим усиливается. В режиме генератора ослабление поля происходит на набегающем крае полюса, а усиление на сбегающем. В двигательном режиме картина обратная.
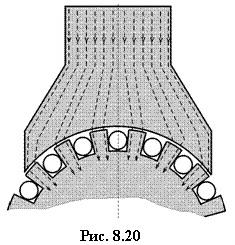
В идеальном случае без учета насыщения усиление и ослабление поля происходят в одинаковой степени, в результате чего магнитный поток сохраняет то же значение, что и при холостом ходе. Реально магнитная система насыщена. Более насыщена часть полюса с большей индукцией. Поскольку с насыщением магнитное сопротивление возрастает, результирующая индукция BΣ,н под этой частью полюса оказывается меньше суммы индукций полей возбуждения Вв и якоря Вя (см. рис. 8.20). В результате ослабление поля проявляется сильнее, чем усиление. Поэтому в насыщенной машине реакция якоря является размагничивающей. Это отрицательно сказывается на характеристиках машины.
Из рис. 8.19 также следует, что точки, где кривая индукции BΣ проходит через ноль смещаются относительно геометрической нейтрали, определяя положение так называемой физической нейтрали. В генераторном режиме физическая нейтраль смещается относительно геометрической нейтрали в сторону вращения якоря, в двигательном режиме – в противоположную сторону. Для снижения проявления поперечной реакции якоря служит специальная компенсационная обмотка, включаемая как и обмотка дополнительных полюсов последовательно с якорной обмоткой. Поток, создаваемый ею, направлен встречно потоку якоря и компенсирует его.
При сдвиге щеток с геометрической нейтрали в МПТ появляется продольная реакция якоря. Ее появление можно объяснить тем, что МДС якоря Fя в этом случае можно условно разложить на две составляющих: одна из которых направлена по геометрической нейтрали и образует поперечную реакцию якоря, а другая – по оси главных полюсов и есть продольная реакция якоря. В зависимости от направления сдвига щеток она может быть размагничивающей или намагничивающей, т.е. ослабляющей или усиливающей поле возбуждения. Тем не менее, в подавляющем числе случаев можно считать, что входящий в выражения (8.10) и (8.14) поток Ф создается только обмоткой возбуждения, т.е. реакция якоря не проявляется, а коммутация секций якорной обмотки происходит мгновенно.
Также необходимо иметь в виду, что при зубчатой конструкции магнитопровода якоря из-за экранирующего действия зубцов внешнее поле в области пазов с проводниками обмотки якоря резко ослаблено и большая часть магнитного потока, создаваемого полюсами, замыкается через зубцы, как это условно показано на рис. 8.20. Поэтому реально развиваемый электромагнитный момент имеет две составляющие. Причем только меньшая его часть возникает непосредственно в результате взаимодействия тока якоря и магнитного потока. Большая же часть электромагнитного момента есть результат взаимодействия полей от обмотки якоря и обмотки возбуждения и приложена к боковым поверхностям зубцов. Заметим, что эта же особенность справедлива для всех индуктивных электрических машин, проводники в которых расположены в пазах. Тем не менее, в сумме эти две составляющие образуют результирующий момент, значение которого для МПТ определяется в соответствии с выражением (8.14).
Из сказанного следует, что отмеченные выше особенности реальных конструкций и работы МПТ не изменяют общего вида выражений для ЭДС (8.10) и электромагнитного момента (8.14), полученных для ее простейшей модели. Они отражаются только на коэффициенте пропорциональности k, входящем в выражения для ЭДС (8.10) и электромагнитного момента (8.14). При числе активных проводников обмотки N, числе параллельных ветвей a и числе пар главных полюсов р общее выражение для этого коэффициента имеет вид:
Как видно, он выражается через конструктивные параметры МПТ, поэтому его обычно называют конструктивным коэффициентом.
Свойства МПТ в значительной степени зависят от суммарного сопротивления якорной цепи Rя. Из изложенного выше следует, что оно обуславливается в общем случае сопротивлениями трех обмоток – якорной, компенсационной и дополнительных полюсов. В нем также обычно учитывают переходное сопротивление щеточно-коллекторного узла. В общепромышленных МПТ обычного исполнения суммарное сопротивление якорной цепи Rя невелико, как правило, менее одного Ома. Причем, оно тем меньше, чем больше мощность машины.
Дата добавления: 2021-09-25; просмотров: 514;
Поиск по сайту
Узнать еще
- Cпецифика логопедической работы в остром периоде
- H. Разработка мер по повышению качества работы органа здравоохранения
- I. Специфические особенности процесса воспитания в сравнении с процессом обучения.
- II раздел. Организация работы логопеда в группе для детей с ОНР
- II.1.5. ОСОБЕННОСТИ РАЗВИТИЯ ЛИЧНОСТИ И ЭМОЦИОНАЛЬНО-ВОЛЕВОЙ СФЕРЫ
- III.1.4. ОСОБЕННОСТИ РАЗВИТИЯ ПОЗНАВАТЕЛЬНОЙ СФЕРЫ У ДЕТЕЙ С НАРУШЕНИЯМИ СЛУХА
- III.1.5. ОСОБЕННОСТИ РАЗВИТИЯ ЛИЧНОСТИ И ЭМОЦИОНАЛЬНО-ВОЛЕВОЙ СФЕРЫ
- III.2.5. ОСОБЕННОСТИ РАЗВИТИЯ ЛИЧНОСТИ И ЭМОЦИОНАЛЬНО-ВОЛЕВОЙ СФЕРЫ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
