Адаптивный высокочастотный фильтр
Использование в адаптивном фильтре весового коэффициента для подавления низкочастотного дрейфа на входе системы является частным случаем режекции сигнала на нулевой частоте. На рисунке 19.5 приведена схема только с одним весовым коэффициентом, так как не нужна подстройка фазы сигнала. Эталонным сигналом может быть постоянный сигнал единичной амплитуды.
Передаточную функцию тракта прохождения сигнала от входа до выхода устройства подавления можно получить следующим образом. Из рисунка 19.5 видно, что ук = wк, поэтому для алгоритма наименьших квадратов в этом случае
yk+1 = yk + 2μεk = yk + 2μ(dk - yk). (19.25)
Находим z-преобразование от (19.25) и получаем для установившегося режима
 (19.26)
(19.26)
Подставим теперь в (19.26) Y(z) =D(z)- E(z) и получим
 . (19.27)
. (19.27)
Из равенства (19.27) следует, что фильтр с весовым коэффициентом смещения представляет собой высокочастотный фильтр с нулем на окружности единичного радиуса на нулевой частоте и полюсом на действительной оси на расстоянии 2μ влево от нуля. Отметим, что это соответствует одночастотному режекторному фильтру (19.19) с ω0 = 0 и С = 1. Частота, на которой мощность режектируемого сигнала уменьшается вдвое, равна ω = 2μ радиан.
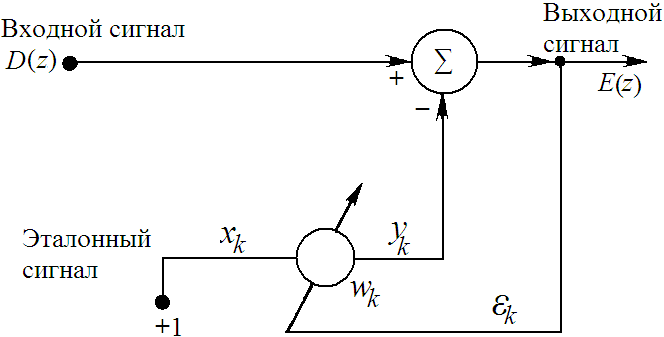
Рис. 19.5. Схема адаптивного высокочастотного фильтра, полученного путем установления на эталонном входе постоянного единичного сигнала
В адаптивном высокочастотном фильтре исключается не только постоянное смещение, но и медленно меняющийся дрейф во входном сигнале. Более того, хотя это здесь и не показано, в этом случае одновременно осуществляется подавление низкочастотной случайной помехи при постоянном эталонном сигнале.
Дата добавления: 2017-10-04; просмотров: 1892;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
