АВТОМАТИЗАЦИЯ БУЛЬДОЗЕРОВ
Возросшие требования к качеству планировочных работ, особенно при сооружении земляного полотна дороги, вызвали ускоренную автоматизацию скреперов, бульдозеров и автогрейдеров, выполняющих эти работы. При этом основными направлениями автоматизации явились стабилизация требуемого углового положения рамы и ножа в поперечной и продольной плоскостях, управление подъемом отвала при перегрузке двигателя, управление скоростью для реализации имеющейся мощности и управление группой машин по направляющему лучу лазера. Наибольшее распространение среди землеройной техники имеют бульдозеры.
Автономная система автоматического управление рабочим органом бульдозера типа «Автоплан-10» (рис.202) состоит в общем случае из блоков управления 5 и перегрузки 4, пульта управления 3,
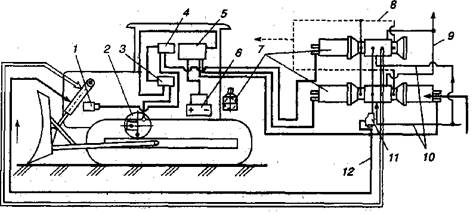 Рис.202. Электрогидравлическая схема системы «Автоплан-10» на бульдозере
Рис.202. Электрогидравлическая схема системы «Автоплан-10» на бульдозере
|
маятникового датчика углового положения отвала 2, датчика числа оборотов двигателя (тахогенератора) 1, реверсивных гидроэлектрозолотников 7, аккумуляторных батарей 6, обратного клапана с дросселем 11, агрегатов и приборов гидросистемы, а также трубопроводов (дренажного 5, слива рабочей жидкости в бак 9, подвода 10 и подачи 12 рабочей жидкости под давлением). Пульт, блоки управления и перегрузки, а также аккумуляторные батареи установлены в кабине машиниста. С помощью блока управления отвалу бульдозера задается требуемый угол продольного наклона, а сигнал датчика преобразуется в команду, на электромагниты реверсивного гидрозолотника. Пульт управления служит для обеспечения кнопочного дистанционного управления подъемом и опусканием отвала бульдозера. Реверсивный гидрозолотник осуществляет управление гидроприводом перемещения отвала в соответствии с командами блока управления и расположен позади корпуса бортовых фрикционов трактора. Маятниковый датчик углового положения установлен на одном из толкающих брусьев универсальной рамы бульдозера рядом с шарнирным соединением толкающей рамы. Он предназначен для подачи электрического сигнала в блок управления и представляет собой маятник, соединенный с подвижным контактом потенциометра.
Работа бульдозера с автоматическим управлением осуществляется следующим образом. В зависимости от уклона поверхности строящейся дороги или площадки на пульте управления задается необходимый угол наклона толкающего бруса, который соответствует положению режущей кромки ножа отвала относительно опорной поверхности гусениц. В процессе работы бульдозера гусеницы встречаются с неровностями площадки, а угол наклона толкающих брусьев при этом изменяется в обе стороны от горизонтали и вертикали. В этом случае маятниковый датчик посылает в блок управления электрические сигналы — импульсы тока об изменении угла наклона толкающего бруса рамы. В свою очередь импульсы, преобразованные в электрический ток, направляют его в электрозолотник, соленоид которого обеспечивает подачу рабочей жидкости гидросистемы в соответствующую полость рабочего гидроцилиндра. При этом шток гидроцилиндра перемещается, устанавливая отвал бульдозера в заданное для работы положение.
Указанная система стабилизации положения отвала обеспечивает надежность работы только при практически постоянной частоте вращения вала двигателя. При снижении частоты вращения вала двигателя, возникающей с увеличением усилий на отвале, механизм контроля системы отключает автомат стабилизации, подавая сигнал на выглубление отвала. После восстановления частоты вращения вала двигателя трактора до нормальной, контролируемой датчиком числа оборотов двигателя (тахогенератором, приводимым от работомера), вновь включается автомат стабилизации положения отвала, который принимает прежнее заданное положение. Скорость опускания отвала для заглубления регулируется обратным клапаном с дросселем, который служит и ограничителем. Предохранительный клапан рассчитан на давление 10 МПа и защищает систему от перегрузки. Работа гидропривода автоматической системы осуществляется от шестеренного насоса, установленного на тракторе.
Система «Копир-Автоплан», используемая в работе бульдозеров, позволяет контролировать положение рабочего органа по внешним жестким направляющим (трос, бордюр и т. п.). В настоящее время наиболее совершенной системой автоматического управления бульдозеров является система «Комбиплан‑10ЛП» с лазерными приборами (рис.203). Эта система позволяет изменять и стабилизировать угловое положение отвала в продольной и поперечной плоскостях с помощью датчиков, установленных на отвале и раме машины, а также защищать двигатель от перегрузок. При этом для соблюдения машиной
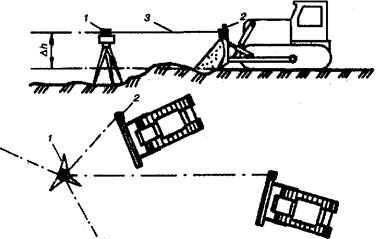 Рис.203. Система лазерного контроля планирования поверхности земли бульдозером: 1 — лазерный нивелир; 2 — приемник; 3 — лазерная плоскость
Рис.203. Система лазерного контроля планирования поверхности земли бульдозером: 1 — лазерный нивелир; 2 — приемник; 3 — лазерная плоскость
|
заданного направления движения и регулирования положения рабочего органа по высоте используют лазерные устройства. Они включают в себя лазерный нивелир (излучатель), устанавливаемый на площадке, и фотоприемное устройство ФПУ, контролирующее положение отвала относительно луча лазера, установленное на отвале бульдозера. Глубина резания в продольной плоскости задается из кабины путем установки ФПУ на требуемую высоту Н. Отклонение положения ФПУ от заданного при проходе машины по неровностям вызывает появление сигнала ΔН, воздействующего на механизм перемещения ФПУ, который восстанавливает требуемое положение рабочего органа на эту величину.
К достоинствам этих систем следует отнести возможность осуществлять управление не только одной машиной, но и группой машин на значительных линейных расстояниях и площадях при оптимальных рабочих скоростях. При этом точность планировки грунта по продольному профилю с системой автономного автоматического управления положением отвала составляет ±50мм, а по лучу лазера—±30 мм.
При работе землеройно-транспортных машин цикличного действия машинисту приходится производить многократные включения и выключения привода рабочего органа. В среднем за смену он более 1000 раз изменяет положение отвала бульдозера. Это затрудняет рациональную загрузку двигателя. Поэтому стабилизация нагрузки двигателя путем изменения толщины срезаемой стружки грунта по мере его набора рабочим органом бульдозера или скрепера возможна только при автоматизации указанного процесса.
Автоматическое регулирование работы двигателя включает в себя две параллельные и в то же время зависимые системы, представленные на рис.204 в виде упрощенной блок-схемы:
а) регулирование частоты вращения вала двигателя с помощью центробежного регулятора, увеличивающего подачу топлива при изменении этой частоты; и б) регулирование частоты вращения вала двигателя в функции изменения нагрузки.
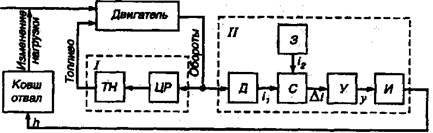 Рис.204. Блок-схема системы стабилизации загрузки двигателя
Рис.204. Блок-схема системы стабилизации загрузки двигателя
|
В первой системе цепь регулирования частоты вращения вала двигателя состоит из центробежного регулятора оборотов ЦР и топливного насоса ТН, которые регулируют подачу топлива в цилиндры двигателя. Вторая система регулирования включает в себя следующие основные элементы и принципы их действия:
• датчик (тахогенератор) Д, сигнал которого i1 пропорционален частоте вращения двигателя;
• задающий элемент З, подающий постоянный электрический сигнал i2 пропорциональный заданным номинальным частотам вращения вала двигателя;
• сравнивающее устройство С, в котором производится алгебраическое сложение сигналов от датчика и задающего элемента и полученная разность представляет собой управляющий сигнал Δi;
• усилитель У, усиливающий управляющий сигнал до величины y, способный управлять механизмом подъема-опускания рабочего органа;
• исполнительный механизм И, преобразующий управляющее воздействие в механическое перемещение рабочего органа h и предоставляющий собой два гидроцилиндра двустороннего действия с электрогидравлическим золотниковым устройством.
Автоматически перемещая рабочий орган машины по вертикали, исполнительный механизм тем самым регулирует толщину стружки грунта, которая определяет нагрузку на двигатель.
В связи с тем, что требования к нагрузке двигателя во время работы остаются постоянными, рассмотренная система автоматического регулирования является стабилизирующей.
Благодаря автоматизированной системе управления производительность бульдозеров увеличивается в среднем на 15%.
Дата добавления: 2017-10-04; просмотров: 1862;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
