Системы стабилизации и автономного управления объекта наведения
Автономные системы наведения самолетов и ракет имеют сходный принцип построения. При автономном управлении координатор, как правило, воздействует на автопилот ЛА. На рисунке 4.3 в качестве примера приведена упрощенная функциональная схема системы автономного управления по заданному направлению (курсу или тангажу) [8]. Система управления содержит три основных контура: контур рулевого управления, контур стабилизации угловых движений ЛА относительно центра масс и контур управления движением центра масс в заданном направлении. Первые два
контура составляют автопилотный контур или автопилот и обеспечивают необходимые характеристики работы рулевого привода и угловой стабилизации при исполнении команд координатора, входящего в контур управления движением центра масс.
Задание и измерение угловых координат ЛА координатором осуществляется с помощью позиционных гироскопов.
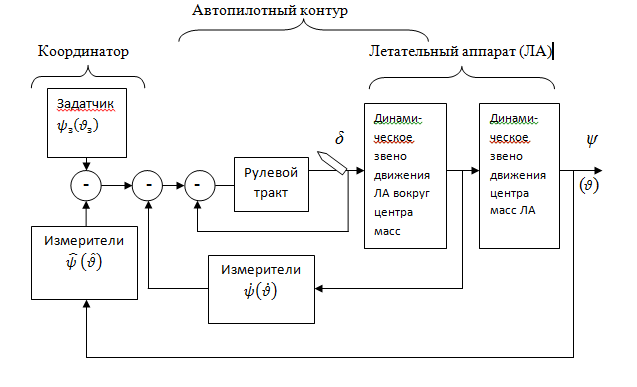
Рисунок 4.3 – Упрощенная функциональная схема автономного управления
Гироскоп в зависимости от способа установки на ЛА позволяет попарно измерять угол тангажа и курса, угол тангажа и крена, угол курса и крена.
С помощью двухстепенных гироскопов, называемых также прецизионными, или скоростными, можно измерять скорости вращения ЛА вокруг его осей. С помощью гироскопов других типов можно формировать сигналы, пропорциональные угловым ускорениям (демпфированный гироскоп), и получать сигналы, пропорциональные интегралу от угловых отклонений (интегрирующие гироскопы).
В силу возмущающих сил и моментов происходит уход главной оси гироскопа от первоначального, заданного направления (прецессия). Поэтому в процессе полета необходимо корректировать положение главной оси гироскопа. Кроме того, в условиях полета вокруг Земли необходимо, чтобы главная ось гироскопа была перпендикулярна плоскости горизонта. Это обеспечивается различного рода искусственными вертикалями и горизонталями.
Для ЛА и снарядов дальнего действия коррекция гироскопов обязательна. Для ЛА ближнего действия уходы гироскопов за время полета незначительны и коррекция может не производиться.
Управление по заданному курсу часто сочетается с управлением по заданному маршруту, когда система управления контролирует движение ЛА по линейным отклонениям от заданной линии наведения. На рисунке 4.4 (см. конец лекции, стр.18) представлена структурная схема автономного управления ЛА при полете на заданной высоте, что условно соответствует движению по заданному маршруту в вертикальной плоскости. Рисунок вынесен в конец лекции из-за его альбомной ориентации.
Контур управления состоит из координатора, автопилота и кинематического звена. Координатор включает в себя задатчики высоты  и измеритель высоты
и измеритель высоты  радиотехнического или барометрического типов. Автопилот предполагается линейным и состоящим из усилителя
радиотехнического или барометрического типов. Автопилот предполагается линейным и состоящим из усилителя  , рулевой машинки с функцией передачи
, рулевой машинки с функцией передачи  , скоростного и позиционного гироскопов, измеряющих скорость изменения тангажа
, скоростного и позиционного гироскопов, измеряющих скорость изменения тангажа  и сам тангаж
и сам тангаж  , и устройств в цепях дополнительных обратных связей
, и устройств в цепях дополнительных обратных связей  ,
, 

 , обеспечивающих устойчивость и требуемые переходные характеристики управления ЛА. Обратная связь через элемент
, обеспечивающих устойчивость и требуемые переходные характеристики управления ЛА. Обратная связь через элемент  (тахометрическая обратная связь) обеспечивает высокую пропорциональность скорости работы рулевой машинки входному сигналу усилителя. Через элемент
(тахометрическая обратная связь) обеспечивает высокую пропорциональность скорости работы рулевой машинки входному сигналу усилителя. Через элемент  осуществляется жесткая обратная связь по отклонениям руля высоты, которая исключает интегрирующий эффект рулевого привода, придавая контуру, охваченному этой связью, свойства апериодического звена с малой постоянной времени. Обратная связь через скоростной гироскоп и элементы
осуществляется жесткая обратная связь по отклонениям руля высоты, которая исключает интегрирующий эффект рулевого привода, придавая контуру, охваченному этой связью, свойства апериодического звена с малой постоянной времени. Обратная связь через скоростной гироскоп и элементы 
 обеспечивает быстроту и необходимые качества переходного процесса управления по тангажу.
обеспечивает быстроту и необходимые качества переходного процесса управления по тангажу.
В качестве других стабилизирующих дополнительных обратных связей используются связи через датчики перегрузок , которые охватывают часть контура ЛА не только по угловым координатам, но и по линейным поперечным перемещениям, так как  .
.
Как видно из рисунка, общий контур управления по высоте, без учета обратной связи по тангажу, содержит два интегратора (  ) и неустойчив. Жесткая обратная связь по тангажу, действующая при полете с заданным тангажом
) и неустойчив. Жесткая обратная связь по тангажу, действующая при полете с заданным тангажом  , устраняет интегрирующие свойства ЛА по наклону траектории
, устраняет интегрирующие свойства ЛА по наклону траектории  и придает контуру управления по высоте устойчивость. Устойчивость общего контура может быть также получена за счет формирования сигнала рассогласования в виде
и придает контуру управления по высоте устойчивость. Устойчивость общего контура может быть также получена за счет формирования сигнала рассогласования в виде  . Однако дифференцирование сигналов измерителя высоты приводит к увеличению уровня его собственных и внешних шумов.
. Однако дифференцирование сигналов измерителя высоты приводит к увеличению уровня его собственных и внешних шумов.
Полезным для теории изучения АСУ является рассмотрение структурной схемы управления полетом ЛА по заданному маршруту при так называемом полярном управлении в горизонтальной плоскости, соответству-ющем условию  и
и  (рисунок 4.5)
(рисунок 4.5) 
При декартовом управлении схема повторяет рисунок 4.4. Измерение бокового отклонения  может производиться интегрирующими гироскопами или допплеровскими системами, определяющими боковой снос ЛА.
может производиться интегрирующими гироскопами или допплеровскими системами, определяющими боковой снос ЛА.
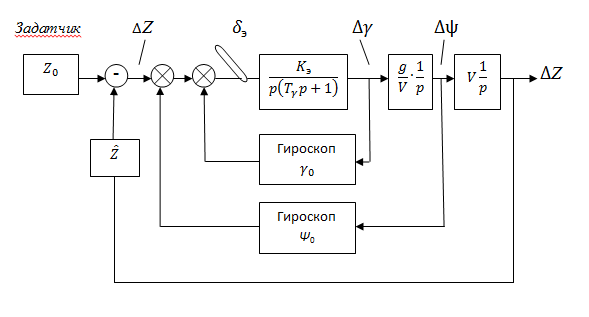
Рисунок 4.5 – Структурная схема стабилизации крена
и использование его при управлении боковым движением ЛА
Большой интерес при управлении подвижными объектами представляет использование инерциальных измерителей, определяющих как боковое уклонение, так и весь пройденный путь двукратным интегрированием соответствующих составляющих вектора ускорения  или перегрузок n:
или перегрузок n:
 . (4.1)
. (4.1)
Контур управления в этом случае замыкается через акселерометры, которые измеряют составляющие вектора ускорения, и вычислительное устройство, содержащее два интегратора. При измерении составляющих перегрузок датчики ускорений (акселерометры) должны устанавливаться на гиростабилизированных платформах. Сигналы акселерометров могут сами использоваться для стабилизации таких платформ.
Автономное наведение самолетов и вертолетов на малых и сверхмалых высотах может выполняться путем маневра в вертикальной плоскости в режиме следования рельефу местности (рис. 4.6,а), либо путем маневра в горизонтальной плоскости в режиме обхода препятствий (рис. 4.6,б).
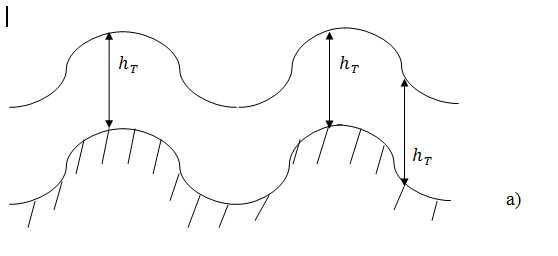
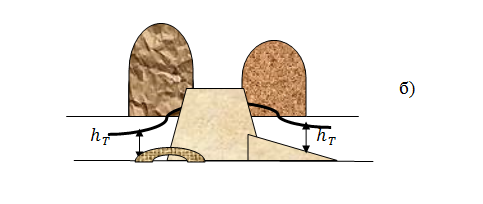
Рисунок 4.6 – Наведение: а) в режиме следования рельефу местности;
б) в режиме обхода препятствий
В обоих этих случаях высока опасность столкновения с Землей. Это обусловлено тем, что реакция самолета на изменение высоты запаздывает из-за инерционности САУ, самого самолета и специфики управления подъемной силой. В связи с этим в системах маловысотного полета обычно используется управление по закону
 , (4.2)
, (4.2)
где  - требуемое значение высоты,
- требуемое значение высоты,  - высота над упрежденной точкой по направлению полета, которую будет иметь ЛА при условии сохранения направления полета, имеющегося на данный момент времени (рис. 4.7). Эта точка отстоит от ЛА на определенное расстояние, которое зависит от скорости полета, его инерционных свойств и специфики управления подъемной силой.
- высота над упрежденной точкой по направлению полета, которую будет иметь ЛА при условии сохранения направления полета, имеющегося на данный момент времени (рис. 4.7). Эта точка отстоит от ЛА на определенное расстояние, которое зависит от скорости полета, его инерционных свойств и специфики управления подъемной силой.
Управление по дальности базируется на контроле текущего расстояния  до цели, где
до цели, где  - координаты текущего положения ОУ,
- координаты текущего положения ОУ,
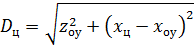 . (4.3)
. (4.3)
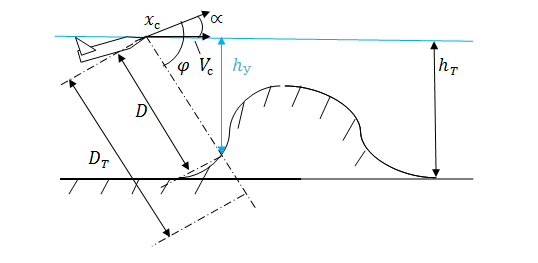
Рисунок 4.7 – Условия маловысотного полета
На основании вычисленных значений осуществляется изменение режима работы системы наведения (изменение высоты и скорости полета, включение БРЛС, оптико-электронной станции или других датчиков, переход в режим самонаведения и т.д.).
Приложение 1
Мобильный ракетный комплекс береговой обороны "Club-M"
Мобильный ракетный комплекс "Калибр-М" (экспортное обозначение Club-M) предназначен для организации противокорабельной обороны и придания боевой устойчивости объектам прибрежной зоны, а также поражения широкой номенклатуры стационарных (малоподвижных) наземных целей в любое время суток в простых и сложных метеоусловиях. Разработан в ОАО "ОКБ "Новатор" (г.Екатеринбург).
В состав комплекса "Калибр-М" входят:
самоходная пусковая установка (СПУ),
транспортно-заряжающие машины (ТЗМ),
крылатые ракеты 3М-54Э, 3М-54Э1 и 3М14Э в транспортно-пусковых контейнерах (ТПК),
машина технического обеспечения, машина связи и управления, оборудование обеспечения и хранения ракет.



Ракета 3М-14Э оснащается комбинированной системой наведения. Управление ракетой в полете - полностью автономное. Бортовая система управления построена на базе автономной инерциальной навигационной системы АБ-40Э (разработчик - Государственный НИИ Приборостроения). В состав системы управления ракеты входит радиовысотомер типа РВЭ-Б (разработчик - УПКБ "Деталь") и приемник сигналов системы спутниковой навигации (ГЛОНАСС или GPS). Радиовысотомер обеспечивает полет в режиме огибания рельефа за счет точного выдерживания высоты полета: над морем - не более 20 м, над сушей - от 50 до 150 м (при подходе к цели - снижение до 20 м).
Полет ракет проходит по заранее заложенному маршруту, в соответствии с данными разведки относительно положения цели и наличия средств противовоздушной обороны. Ракеты способны преодолевать зоны развитой системы ПВО противника, что обеспечивается предельно малыми высотами полета (с огибанием рельефа местности) и автономностью наведения в режиме "молчания" на основном участке. Коррекция траектории полета ракеты на маршевом участке осуществляется по данным подсистемы спутниковой навигации и подсистемы коррекции по рельефу местности. Принцип работы последней основан на сопоставлении рельефа местности конкретного района нахождения ракеты с эталонными картами рельефа местности по маршруту ее полета, предварительно заложенными в память бортовой системы управления. Навигация производится по сложной траектории, ракета имеет возможность обходить сильные зоны ПВО/ПРО противника или сложные по рельефу участки местности - путем ввода в полетное задание координат так называемых пунктов поворота маршрута (до 15 опорных точек).
Наведение на конечном участке траектории осуществляется при помощи помехозащищенной активной радиолокационной головки самонаведения АРГС-14Э, эффективно выделяющей слабозаметные малоразмерные цели на фоне подстилающей поверхности. Головка АРГС-14Э диаметром - 514мм и весом 40кг разработана в ОАО "НПП Радар ММС" (г.Санкт-Петербург), имеет угол обзора по азимуту (пеленгу) ±45°, по углу места - от +10° до -20°. Дальность обнаружения типовой цели около 20км. Исключительная маневренность позволяет с высокой точностью вывести ракету на цель.
Российско-индийское совместное предприятие "БраМос" создало сверхзвуковую крылатую ракету, которую возможно применять в высокогорье. Об этом, как сообщает ИТАР-ТАСС, в ходе салона МАКС-2011 заявил президент совместного предприятия Сиватхану Пиллаи. По его словам, новая ракета способна вести полет с огибанием рельефа местности. Мы впервые в мире сделали подобную ракету и по пускам показывали очень хорошие результаты", - отметил Пиллаи. Ранее испытательные пуски ракеты были произведены в горах и в пустынной местности. Минимальная высота полета новой сверхзвуковой ракеты составляет десять метров, что значительно усложняет задачу по ее перехвату. Отвечая на вопрос, сколько ракет "БраМос" уже принято на вооружение ВМС, ВВС и Сухопутных войск Индии, Пиллаи сказал: "Сотни". Сверхзвуковая ракета "БраМос", в основе разработки которой лежит российская ракета "Яхонт", может развивать скорость, превышающую скорость звука в 2,5-2,8 раз. Помимо высокой скорости, к преимуществам ракеты относится и ее универсальность в применении. Так, "БраМос" может быть создана в модификациях для морского, подводного, воздушного и берегового базирования. Первый испытательный пуск ракеты был осуществлен в 2001 году.

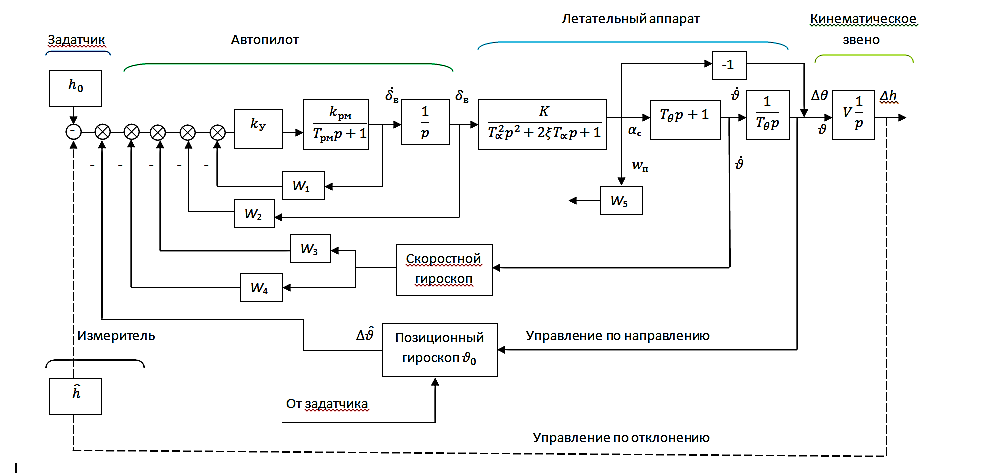
Рисунок 4.4 – Структурная схема системы управления ЛА с автопилотом по тангажу и высоте
[1] В директорном режиме исполнительские функции управления осуществляет человек. Он сам перемещает органы управления, но при этом исполняет команды бортовой вычислительной машины. Команды выдаются посредством директорных сигналов; они указывают летчику направление и амплитуду перемещения органа управления. В данном случае автоматизирован (точнее, полуавтоматизирован) сбор пилотажных сигналов (полуавтоматизировано восприятие), их обобщение и принятие решения о способах исполнения действия. В отличие от директорного режима в автоматическом человек освобожден от физических воздействий на органы управления (исполнительские операции выполняет автомат).
Дата добавления: 2017-09-01; просмотров: 4847;
Поиск по сайту
Узнать еще
- CRM - стратегия управления взаимоотношениями с клиентом
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
