Стабилизация ЛА на траектории
Процессом управления ЛА называется удерживание его центра массы на заданной или вырабатываемой в процессе управления траектории. Как правило, процессу управления предшествует процесс стабилизации ЛА. Процессом стабилизации называется сохранение определенного углового положения ЛА относительно траектории полета. Устройство, стабилизирующее угловое положение ЛА, называется автопилотом. На рисунке 2.19 представлены структурные схемы стабилизации и управления ЛА. В отсутствие крена сильно оперенный ЛА может совершать прямолинейный полет без автопилота (рисунок 2.19,а), однако движение такого ЛА сильно зависит от внешних условий, и управление им затруднено. В сочетании с автопилотом (рисунок 2.19,б) ЛА может совершать устойчивый полет в заданном направлении или выполнять отдельные маневры (разворот, снижение, набор высоты и т.п.). Схема управления ЛА, представленная на рисунке 2.19,в, предусматривает возможность изменения текущих координат ЛА по командам, вырабатываемым на пункте управления.
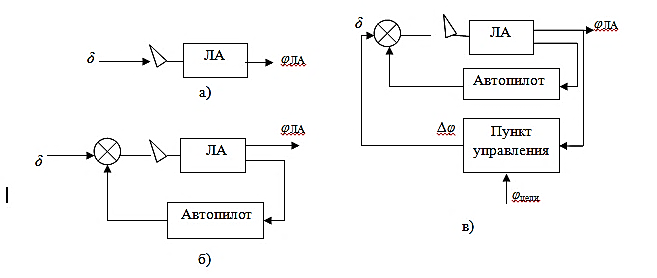
Рисунок 2.19 - Упрощенные схемы стабилизации и управления ЛА
Остановимся на стабилизации ориентации подробнее. Влияние случайных воздействий на корпус ЛА приводит к изменению его ориентации в пространстве, что изменяет величину и направление аэродинамической силы  и искривляет траекторию. Поэтому движение ЛА в атмосфере осуществляется путем воздействия на рули через систему стабилизации-ориентации (автопилот).
и искривляет траекторию. Поэтому движение ЛА в атмосфере осуществляется путем воздействия на рули через систему стабилизации-ориентации (автопилот).
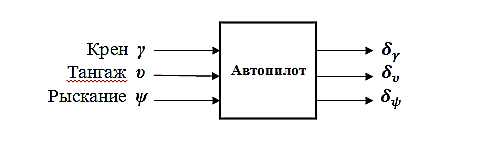
Рисунок 2.20 – Управляющие сигналы автопилота
Поскольку ориентация ЛА определяется значением трех углов поворота (рисунок 2.20) связанной системы координат относительно отсчетной, то автопилот (АП) должен представлять собой устройство с тремя входами и тремя выходами. Однако, из теории полета известно, если γ = 0, то взаимной связи между углами поворота по тангажу υ и рысканию ψ – нет. Это позволяет строить замкнутый контур автоматической стабилизации каждого из углов отдельно, путем раздельного измерения углового отклонения по каждой координате и воздействия полученным сигналом ошибки на соответствующий руль, т.е. АП распадается на отдельные устройства стабилизации. Сигналом рассогласования для каждого контура стабилизации является измеренный угол или угловая скорость [5].
На рисунке 2.21 приведена структурная схема АП по одной угловой координате, которая содержит динамические звенья, отображающие корпус ракеты, чувствительный элемент для измерения отклонений и рулевой тракт.
Влияние случайных возмущений на схему стабилизации (случайные воздействия на корпус, флюктуации тяги, вибрации деталей, люфты механизмов, шумы усилителей и др.) представлено на рисунке подключением источника аддитивных шумов (шумообразного изменения угла).
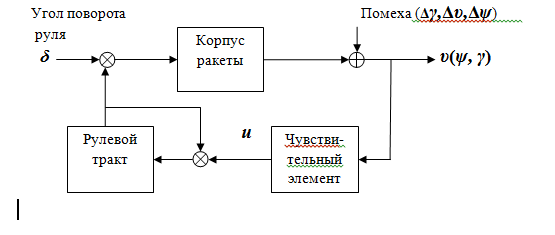
Рисунок 2.21 – Структурная схема АП
Рассмотрим каждое звено в отдельности.
1. Звено «корпус ракеты» описывается передаточной функцией угла тангажа по углу отклонения руля высоты (звено ориентации)
 (2.5)
(2.5)
или такой же передаточной функцией для осесимметричных ракет по рысканию  .
.  - постоянная времени руля высоты. Вид передаточной функции по крену
- постоянная времени руля высоты. Вид передаточной функции по крену  несколько отличается от приведенных передаточных функций, однако звено стабилизации по крену большей частью не входит в контур радиоуправления ЛА, в связи с чем мы его рассматривать не будем.
несколько отличается от приведенных передаточных функций, однако звено стабилизации по крену большей частью не входит в контур радиоуправления ЛА, в связи с чем мы его рассматривать не будем.
В формуле (2.5) параметры функции передачи выражаются через силы и моменты, действующие на ракету в полете,  - коэффициент передачи угла тангажа по углу отклонения руля высоты.
- коэффициент передачи угла тангажа по углу отклонения руля высоты.
2. Рулевой тракт представляет собой силовой следящий привод с обратной связью, управляющий рулевыми машинами, которые отрабатывают измеренный угол поворота корпуса ракеты, воздействуя на соответствующие элементы рулевого устройства (для крылатых ракет – поворотные поверхности аэродинамических рулей, для баллистических ракет – газовые рули или двигатели ориентации).
Для поворота рулевых плоскостей ЛА используются электрические, гидравлические и пневматические рулевые машины.
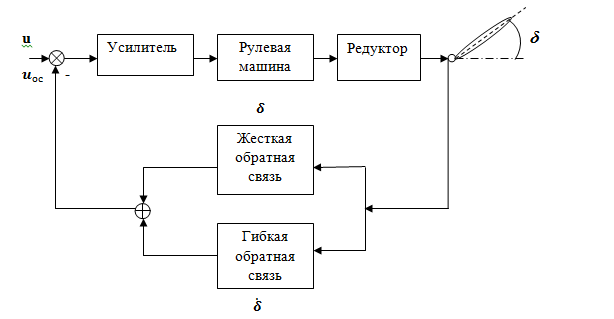
Рисунок 2.22 - Структурная схема рулевого тракта
Рулевые машины приводятся в движение выходным напряжением усилителя сигнала рассогласования, т.е. разностью между входным напряжением и напряжением обратной связи (ОС). Для усиления низкочастотного сигнала ошибки используются магнитные или полупроводниковые усилители, обеспечивающие требуемую выходную мощность.
Угол поворота руля δ измеряется потенциометричеким датчиком, напряжение которого используется для жесткой ОС. Корпус датчика крепится неподвижно относительно корпуса ракеты, а движок жестко связывается с валом руля. При повороте руля движок поворачивается и снимаемое напряжение оказывается пропорциональным углу поворота.
Скорость измерения угла поворота руля измеряется тахогенератором, т.е. генератором переменного или постоянного тока, вырабатывающим напряжение, пропорциональное скорости вращения ротора. Корпус генератора неподвижен, а вал ротора связывается с помощью зубчатой передачи с валом руля. Сигнал тахогенератора используется для демпфирования привода (гибкая ОС).
Передаточную функцию прямой цепи рулевого тракта, состоящей из электрической рулевой машины, нагруженной рулем, и усилителя, можно записать
 (2.6)
(2.6)
где  - постоянная времени рулевой машины, а
- постоянная времени рулевой машины, а  - коэффициент передачи, имеющий размерность град/В·с из-за наличия интегральной связи между входным напряжением и выходным углом поворота.
- коэффициент передачи, имеющий размерность град/В·с из-за наличия интегральной связи между входным напряжением и выходным углом поворота.
Введение ОС по углу и скорости изменения угла дает нам передаточную функцию цепи ОС в виде:
 (2.7)
(2.7)
 и
и  ;
;
 - напряжение обратной связи на входе усилителя;
- напряжение обратной связи на входе усилителя;  - добротность привода управления рулем.
- добротность привода управления рулем.
Передаточная функция замкнутого контура рулевого тракта оказывается равной
 , (2.8)
, (2.8)
где

 ;
; 
- соответственно коэффициент усиления, постоянная времени и коэффициент затухания.
Коэффициент затухания является функцией добротности привода, которая может быть изменена подбором масштаба напряжений гибкой и жесткой ОС, существенно влияя на характер переходного процесса.
3. Чувствительными элементами для измерения углового отклонения от начальной ориентации ЛА являются гироскопические датчики углов. Каждый такой датчик представляет собой свободный гироскоп, т.е. гироскоп с тремя степенями свободы ( прочесть устройство гироскопов самостоятельно [5,с.278]).
Измерение углов с помощью свободных гироскопов производится практически безынерционно, т.е. передаточная функция датчика имеет вид
 , (2.9)
, (2.9)
Здесь  (или
(или  )- отношение напряжения на движке потенциометра гироскопа к соответствующему углу поворота
)- отношение напряжения на движке потенциометра гироскопа к соответствующему углу поворота  (
(  ).
).
4. Чувствительным элементом для измерения угловой скорости поворота ЛА является дифференцирующий гироскоп (гиротахометр (ГТ)). Это устойчивое колебательное звено
 . (2.10)
. (2.10)
Если угловая скорость ракеты невелика по сравнению с собственной частотой гиротахометра (υ΄ ≈ ψ΄ « 1/Tтг), то он может быть представлен дифференцирующим звеном с передаточной функцией
 . (2.11)
. (2.11)
При использовании обоих чувствительных элементов передаточная функция цепи обратной связи контура стабилизации (автопилота), образуемая потенциометрами свободного гироскопа – датчика угла и гиротахометра угловой скорости, является суммой передаточных функций (2.9) и (2.10), взятой с соответствующим масштабным множителем Q.
 . (2.12)
. (2.12)
Изменяя масштабный множитель  , определяющий добротность привода, можно менять ЛАХ цепи ОС, охватывающей звено ориентации ракеты, т.е. ЛАХ АП, добиваясь необходимого качества переходного процесса, а в стационарном режиме – точности стабилизации.
, определяющий добротность привода, можно менять ЛАХ цепи ОС, охватывающей звено ориентации ракеты, т.е. ЛАХ АП, добиваясь необходимого качества переходного процесса, а в стационарном режиме – точности стабилизации.
Составляя по полученным выражениям передаточную функцию замкнутой системы автоматического регулирования углового положения, можно определить запас устойчивости, найти коэффициенты динамических ошибок и вычислить случайные ошибки стабилизации.
Передаточная функция контура стабилизации угла по отклонению руля в соответствии со схемой на рисунке 2.21 имеет вид
 (2.13)
(2.13)
где передаточные функции определены формулами, выведенными выше.
Функция передачи разомкнутого контура стабилизации имеет вид
 , (2.14)
, (2.14)
где  и
и  - полиномы, причем степень полинома в знаменателе выше, чем степень полинома
- полиномы, причем степень полинома в знаменателе выше, чем степень полинома  при наличии в составе АП свободного гироскопа, следовательно, контур стабилизации характеризуется астатизмом 1-го порядка и динамическая ошибка при прямолинейном полете отсутствует.
при наличии в составе АП свободного гироскопа, следовательно, контур стабилизации характеризуется астатизмом 1-го порядка и динамическая ошибка при прямолинейном полете отсутствует.
ПРИЛОЖЕНИЕ 1
Часто под автопилотом понимают (от Авто... и франц. pilote — водитель)
устройство для автоматического управления летательным аппаратом (самолётом, вертолётом, управляемым снарядом и др.). Это некоторое нарушение строгих понятий радиоуправления. Но, наверное, эта терминология и понятия имеют право на жизнь. Идея и схема А. были предложены К. Э. Циолковским в 1898. Впервые полёт самолёта, автоматически управляемый А. фирмы Сперри (США), был продемонстрирован на Всемирной выставке в Париже в 1914. Отечественный А. с пневматической исполнительной системой (АВП-1) был создан в 1932. Первоначально А. предназначался только для стабилизации угловых движений самолёта (движения относительно центра масс), что давало возможность выдерживать заданный режим полёта самолёта без участия лётчика. Усовершенствование А. позволило создать автоматизированную систему, которая производит управление летательным аппаратом не только относительно его центра масс, но также и его центром масс. Это дало возможность автоматизировать все режимы полёта летательного аппарата от взлёта до посадки. Такие А. автоматически управляют и рулями летатательного аппарата, и его двигателями. Они делают возможными полёты различных классов беспилотных летательных аппаратов (ракеты, самолёты-снаряды, искусственные спутники Земли и т.д.).
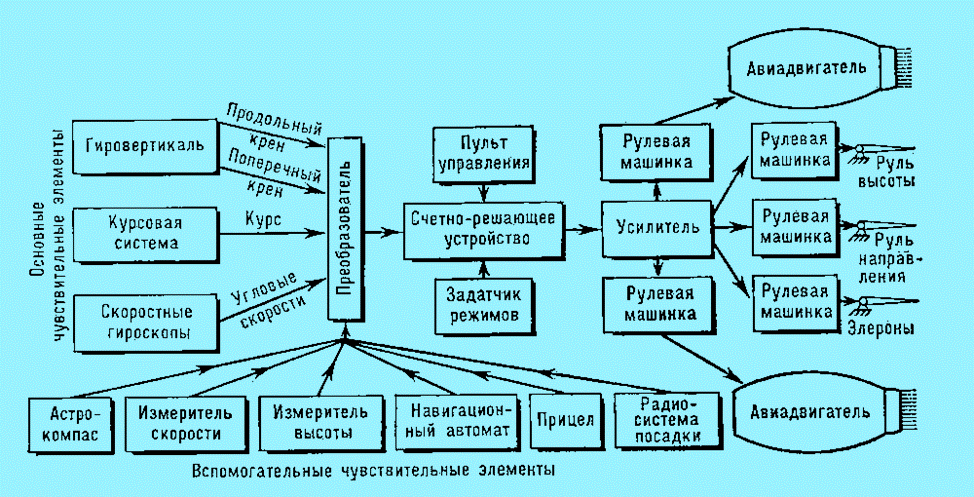
Рисунок П.1 – Структурная схема автопилота
А. на самолёте состоит из ряда подобных по принципу действия автоматов (курса, продольно-поперечных кренов, скорости, высоты и др.), совместная работа которых управляет полётом и стабилизует его (рис.). Чувствительные элемент каждого автомата измеряет один, определённый для него параметр режима полёта (например, или высоту, или курс), называется параметром регулирования, и вырабатывает сигнал, пропорциональный текущему значению параметра. Задатчик режимов полёта вырабатывает сигналы, каждый из которых соответствует требуемому значению определенного параметра регулирования. Эти сигналы сравниваются в вычислительном устройстве. Их разность (рассогласование) после усиления поступает на рулевую машинку А., отклоняющую соответствующий руль самолёта или орган управления двигателем. Так происходит изменение режима полёта. Когда этот режим достигает заданного, сигнал рассогласования исчезает, рулевая машинка прекращает движение и наступает положение равновесия. Устойчивость систем автоматического управления летательными аппаратами достигается как регулированием по производным от регулируемых параметров, так и отрицательной обратной связью соответствующих видов. Кроме автоматов, в А. входят системы управления и регулировки. Необходимую для работы А. энергию в виде электроэнергии или воздуха и масла под давлением доставляет двигатель самолёта.
Лит.: Боднер В. А., Теория автоматического управления полётом, М., 1964.
ПРИЛОЖЕНИЕ 2
Забегая вперед, введем понятие автономного управления. Деление систем управления на автономные и неавтономные возможно по двум признакам — аппаратурному и информационному. При делении по аппаратурному признаку автономными считаются такие системы, в которых вся аппаратура, предназначенная для управления полетом летательного аппарата, расположена на борту этого аппарата. При делении по информационному признаку к автономным относятся такие системы, в которых после пуска (старта) летательного аппарата никакая дополнительная информация о положений или параметрах движения цели (пункта назначения) и КП не учитывается при образовании команд управления. Автономное управление вследствие его информационной автономности непригодно для наведения на цели, расположение или параметры движения которых известны до пуска аппарата недостаточно точно или могут после пуска существенно измениться. Например, автономное управление не может обеспечить наведение снаряда на самолет противника, но пригодно для наведения баллистической ракеты на наземную цель, геоцентрические координаты которой до пуска снаряда известны.
Автономное управление может быть программным или самонастраивающимся. При программном управлении летательный аппарат должен двигаться по программной (номинальной) траектории, т. е. траектории, выбранной до пуска аппарата и зафиксированной соответствующим программным механизмом, установленным на его борту. При этом задача управления сводится к измерению отклонений аппарата от номинальной траектории и ликвидации этих отклонений. Однако программное управление в общем случае не является оптимальным. Типичная функциональная схема системы автономного программного управления изображена на рис.П.2 .
| Рисунок П.2- Автономная система управления |
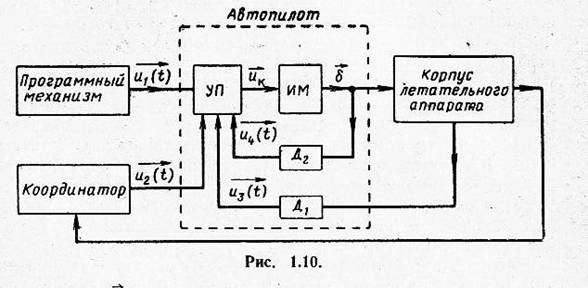
Автопилот, состоящий из усилителя-преобразователя УП, исполнительного механизма (рулевых машин) ИМ и датчиков обратных связей Д 1и Д 2, вырабатывает требуемые отклонения δ рулевых органов на основе поступающих на входы усилителя-преобразователя данных. Здесь U1-
совокупность данных, поступающих от программного механизма и задающих требуемый закон движения аппарата. U2 — совокупность данных, определяющих фактический закон движения центра масс (координаты, скорость, ускорение) аппарата. Устройство, вырабатывающее эти данные, называется координатором. В ряде случаев в усилитель-преобразователь вводятся также данные о текущем времени, скоростном напоре и др. В усилителе-преобразователе входные данные усиливаются и преобразуются в команды управления таким образом, чтобы обеспечить достаточный запас устойчивости и высокое качество регулирования. Закон преобразования данных может быть достаточно сложным и требовать применения в блоке УП электронной вычислительной машины.
Убери из системы координатор и программный механизм и автопилот ни на что не способен. Таким образом с точки зрения теории радиоуправления часто автономный закон управления подменяют понятием автопилот.
Приложение 3
ГИРОСКОП
навигационный прибор, основным элементом которого является быстро вращающийся ротор, закрепленный так, что ось его вращения может поворачиваться. Три степени свободы (оси возможного вращения) ротора гироскопа обеспечиваются двумя рамками карданова подвеса. Если на такое устройство не действуют внешние возмущения, то ось собственного вращения ротора сохраняет постоянное направление в пространстве. Если же на него действует момент внешней силы, стремящийся повернуть ось собственного вращения, то она начинает вращаться не вокруг направления момента, а вокруг оси, перпендикулярной ему (прецессия).
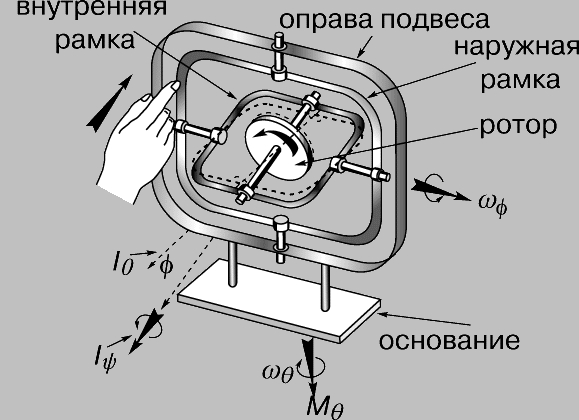
Рис. П.3.1. ГИРОСКОП С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ (с двумя рамками карданова подвеса), кинематическая схема. Iψ - ось собственного вращения ротора, вдоль которой направлен его кинетический момент; Iо - опорное направление кинетического момента; ϕ - угол отклонения внутренней рамки карданова подвеса; ωϕ - угловая скорость поворота внутренней рамки подвеса (прецессия); Mθ - момент возмущающей внешней силы; ωθ - угловая скорость поворота внешней рамки подвеса (нутация).
В хорошо сбалансированном (астатическом) и достаточно быстро вращающемся гироскопе, установленном на высокосовершенных подшипниках с незначительным трением, момент внешних сил практически отсутствует, так что гироскоп долго сохраняет почти неизменной свою ориентацию в пространстве. Поэтому он может указывать угол поворота основания, на котором закреплен. Именно так французский физик Ж. Фуко (1819-1868) впервые наглядно продемонстрировал вращение Земли. Если же поворот оси гироскопа ограничить пружиной, то при соответствующей установке его, скажем, на летательном аппарате, выполняющем разворот, гироскоп будет деформировать пружину, пока не уравновесится момент внешней силы. В этом случае сила сжатия или растяжения пружины пропорциональна угловой скорости движения летательного аппарата. Таков принцип действия авиационного указателя поворота и многих других гироскопических приборов. Поскольку трение в подшипниках очень мало, для поддержания вращения ротора гироскопа не требуется много энергии. Для приведения его во вращение и для поддержания вращения обычно бывает достаточно маломощного электродвигателя или струи сжатого воздуха.
Применение. Гироскоп чаще всего применяется как чувствительный элемент указывающих гироскопических приборов и как датчик угла поворота или угловой скорости для устройств автоматического управления. В некоторых случаях, например в гиростабилизаторах, гироскопы используются как генераторы момента силы или энергии.
Основные области применения гироскопов - судоходство, авиация и космонавтика (см. ИНЕРЦИАЛЬНАЯ НАВИГАЦИЯ). Почти каждое морское судно дальнего плавания снабжено гирокомпасом для ручного или автоматического управления судном, некоторые оборудованы гиростабилизаторами. В системах управления огнем корабельной артиллерии много дополнительных гироскопов, обеспечивающих стабильную систему отсчета или измеряющих угловые скорости. Без гироскопов невозможно автоматическое управление торпедами. Самолеты и вертолеты оборудуются гироскопическими приборами, которые дают надежную информацию для систем стабилизации и навигации. К таким приборам относятся авиагоризонт, гировертикаль, гироскопический указатель крена и поворота. Гироскопы могут быть как указывающими приборами, так и датчиками автопилота. На многих самолетах предусматриваются гиростабилизированные магнитные компасы и другое оборудование - навигационные визиры, фотоаппараты с гироскопом, гиросекстанты. В военной авиации гироскопы применяются также в прицелах воздушной стрельбы и бомбометания. Гироскопы разного назначения (навигационные, силовые) выпускаются разных типоразмеров в зависимости от условий работы и требуемой точности. В гироскопических приборах диаметр ротора составляет 4-20 см, причем меньшее значение относится к авиационно-космическим приборам. Диаметры же роторов судовых гиростабилизаторов измеряются метрами.
ОСНОВНЫЕ ПОНЯТИЯ
Гироскопический эффект создается той же самой центробежной силой, которая действует на юлу, вращающуюся, например, на столе. В точке опоры юлы о стол возникают сила и момент, под действием которых ось вращения юлы отклоняется от вертикали, а центробежная сила вращающейся массы, препятствуя изменению ориентации плоскости вращения, вынуждает юлу вращаться и вокруг вертикали, сохраняя тем самым заданную ориентацию в пространстве. Таким вращением, называемым прецессией, ротор гироскопа отвечает на приложенный момент силы относительно оси, перпендикулярной оси его собственного вращения. Вклад масс ротора в этот эффект пропорционален квадрату расстояния до оси вращения, поскольку чем больше радиус, тем больше, во-первых, линейное ускорение и, во-вторых, плечо центробежной силы. Влияние массы и ее распределения в роторе характеризуется его "моментом инерции", т.е. результатом суммирования произведений всех составляющих его масс на квадрат расстояния до оси вращения. Полный же гироскопический эффект вращающегося ротора определяется его "кинетическим моментом", т.е. произведением угловой скорости (в радианах в секунду) на момент инерции относительно оси собственного вращения ротора. Кинетический момент - векторная величина, имеющая не только численное значение, но и направление. На рис. 1 кинетический момент представлен стрелкой (длина которой пропорциональна величине момента), направленной вдоль оси вращения в соответствии с "правилом буравчика": туда, куда подается буравчик, если его поворачивать в направлении вращения ротора. Прецессия и момент силы тоже характеризуются векторными величинами. Направление вектора угловой скорости прецессии и вектора момента силы связано правилом буравчика с соответствующим направлением вращения.
ГИРОСКОП С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
На рис. П.3.1 дана упрощенная кинематическая схема гироскопа с тремя степенями свободы (тремя осями вращения), причем направления вращения на ней показаны изогнутыми стрелками. Кинетический момент представлен жирной прямой стрелкой, направленной вдоль оси собственного вращения ротора. Момент силы прикладывается нажатием пальца так, что он имеет составляющую, перпендикулярную оси собственного вращения ротора (вторую силу пары создают вертикальные полуоси, закрепленные в оправе, которая связана с основанием). Согласно законам Ньютона, такой момент силы должен создавать кинетический момент, совпадающий с ним по направлению и пропорциональный его величине. Поскольку же кинетический момент (связанный с собственным вращением ротора) фиксирован по величине (заданием постоянной угловой скорости посредством, скажем, электродвигателя), это требование законов Ньютона может быть выполнено только за счет поворота оси вращения (в сторону вектора внешнего момента силы), приводящего к увеличению проекции кинетического момента на эту ось. Этот поворот и есть прецессия, о которой говорилось ранее. Скорость прецессии возрастает с увеличением внешнего момента силы и убывает с увеличением кинетического момента ротора.
В системах стабилизации и управления широкое применение получили ГУ, предназначенные для определения угловых скоростей и угловых ускорений объекта. Подобные устройства относятся к типу дифференцирующих гироскопов. Одной из разновидностей дифференцирующего гироскопа является гиротахометр (ГТ), который при отклонении рамки гироскопа от исходного положения налагает на нее момент, пропорциональный углу отклонения и стремящийся вернуть ее в первоначальное положение. В наиболее точных ГТ используются поплавковый и другие подвесы с малым трением. В корабельных системах стабилизации ГТ применяются для определения угловых скоростей качки и рыскания. Использование сигналов от ГТ позволяет улучшить динамические свойства следящих приводов стабилизации ИУ.

| <== предыдущая лекция | | | следующая лекция ==> |
| Многоступенчатая экстракция. | | | Принципы построения и области применения автономных систем управления |
Дата добавления: 2017-09-01; просмотров: 3410;
Поиск по сайту
Узнать еще
- IV.Стабилизация нефти.
- Временная стабилизация внутренней жизни.
- ВЫДЕЛЕНИЕ И СТАБИЛИЗАЦИЯ ФЕРМЕНТОВ
- Его точки описывают траектории, параллельные некоторой неподвижной плоскости.
- Зависимость от предшествующей траектории развития
- Импорт институтов и смена траектории институционального развития
- Комбинированная стабилизация режима.
- Кривизна траектории.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
