Управление движением ЛА в отсутствие автопилота
В отсутствие автопилота (АП) движение описывается системой нелинейных дифференциальных уравнений, которые в векторной (сокращенной) форме имеют вид
 ,
,  (2.15)
(2.15)
где  – вектор скорости движения центра масс;
– вектор скорости движения центра масс;
 - вектор внешних сил;
- вектор внешних сил;
 - главный момент внешних сил;
- главный момент внешних сил;
 - кинематический момент системы;
- кинематический момент системы;
 – вектор угловой скорости ЛА.
– вектор угловой скорости ЛА.
Решение системы уравнений (2.15) для нахождения зависимостей выходных координат h, z, θ, Φ,υ,ψ, γ, L (см. рисунок 1.13 и 1.15) от отклонений рулевых органов связано со значительными трудностями. Однако сложное движение ЛА можно представить в виде ряда простых: плоского продольного движения (полет на заданной высоте, набор высоты, снижение), бокового движения (чистое рыскание, плоский и координированный развороты), - что значительно упрощает математическое описание движения и процесса управления.
1. Уравнения движения ЛА в связанной системе координат (рисунок 1.15) при плоском продольном движении в отсутствие возмущающих сил имеют вид
yз
А
D h
β x
0 xз
z L α
А'
zз
Рисунок 1. 13 – Земная система координат (прямоугольная)
yз
yсн
zсн αа xсн
υ
γ θ
xз
zз
0 xз
Φ xз
ψ
zз βс
xсн
Рисунок 1.15 – Системы координат, используемые при управлении ЛА
 ,
,
 ,
,
 , (2.16)
, (2.16)
 ,
,
 ,
,
где 
 - момент инерции и момент сил сопротивления ЛА;
- момент инерции и момент сил сопротивления ЛА;
 ,
,  - момент инерции и момент сил сопротивления руля высоты
- момент инерции и момент сил сопротивления руля высоты
 - сила тяги двигателей.
- сила тяги двигателей.
Из этих соотношений можно, опуская промежуточные выкладки [8], выразить функциональной зависимостью между углом тангажа и отклонением руля высоты (2.17), (2.18)
 , (2.17)
, (2.17)
где  -безразмерный коэффициент передачи руля высоты,
-безразмерный коэффициент передачи руля высоты,
 - постоянная времени обратная скорости нарастания наклона траектории;
- постоянная времени обратная скорости нарастания наклона траектории;
 - постоянная времени установления угла атаки;
- постоянная времени установления угла атаки;
 - коэффициент демпфирования.
- коэффициент демпфирования.
Функциональная связь между углом наклона траектории Δθ и отклонением руля высоты  в записывается в виде
в записывается в виде
 . (2.18)
. (2.18)
Здесь  - угол наклона траектории.
- угол наклона траектории.
Выражения (2.17) и (2.18), а также зависимость приращения высоты  от угла наклона траектории
от угла наклона траектории  , отображающая движение ЛА относительно земной поверхности, представлены на рисунке 2.23 в виде функционально-структурной схемы.
, отображающая движение ЛА относительно земной поверхности, представлены на рисунке 2.23 в виде функционально-структурной схемы.
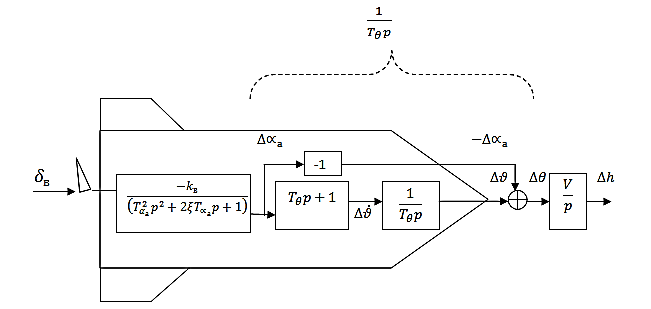
Рисунок 2.23 – Структурная схема ЛА при управлении рулем высоты (продольное движение)
В соответствии с функциями передачи данная структурная схема содержит колебательное звено и два идеальных интегратора. Управление высотой полета по данной схеме при пропорциональном отклонении рулей высоты  является неустойчивым, так как в контур управления входят два идеальных интегратора. Устойчивость может быть достигнута, если в закон управления рулями ввести производную от высоты или фазовое опережение, т.е.
является неустойчивым, так как в контур управления входят два идеальных интегратора. Устойчивость может быть достигнута, если в закон управления рулями ввести производную от высоты или фазовое опережение, т.е.  , или, охватив жесткой обратной связью один из интеграторов, понизить порядок астатизма контура управления.
, или, охватив жесткой обратной связью один из интеграторов, понизить порядок астатизма контура управления.
2. В случае плоского бокового движения функции передачи, описывающие связь курсового ψ и путевого Φ углов с отклонениями руля направления δн , имеют вид аналогичный уже приведенным выражениям,
 (2.19)
(2.19)
и
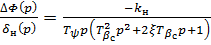 , (2.20)
, (2.20)
где  - постоянная времени обратная скорости нарастания курсового угла, а
- постоянная времени обратная скорости нарастания курсового угла, а  - постоянная времени установления угла скольжения.
- постоянная времени установления угла скольжения.
Учитывая зависимость бокового отклонения ΔZ от путевого угла в виде 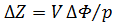 , построим структурную схему ЛА, отображающую его движение в горизонтальной плоскости (рисунок 2.24)
, построим структурную схему ЛА, отображающую его движение в горизонтальной плоскости (рисунок 2.24)
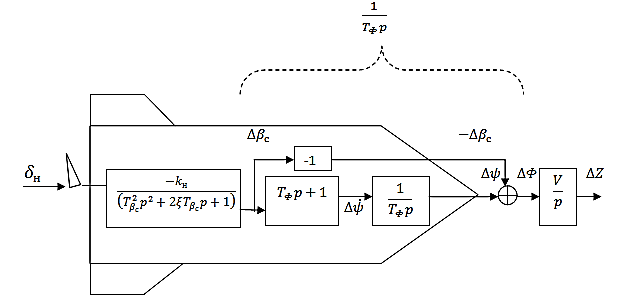
Рисунок 2.24 – Структурная схема ЛА при управлении рулем
направления (боковое движение)
Так же как и в предыдущем случае, схема содержит два интегратора и колебательное звено. Управление боковым движением при пропорциональном отклонении руля направления от бокового отклонения  связано с теми же трудностями, что и управление по высоте.
связано с теми же трудностями, что и управление по высоте.
В отсутствие автопилота, нейтрализующего, как правило, действие одного из интеграторов или придающего устойчивость ЛА другими способами, управление по данной схеме может осуществлять лишь опытный оператор (пилот), учитывающий производную от бокового отклонения и действующий в соответствии с законом

Наряду с функциями передачи ЛА по угловым координатам (2.17) -(2.20) можно составить функции передачи и по линейным координатам.
На рисунке 2.25 приведена структурная схема ЛА, учитывающая поперечное ускорение wп или перегрузку.
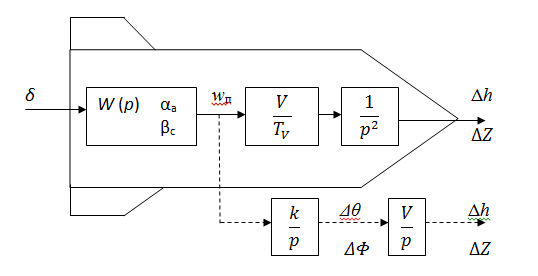
Рисунок 2.25 – Структурная схема ЛА с учетом перегрузок
Пунктиром показана структура по угловым координатам. При управлении ЛА в декартовой системе координат, схема, учитывающая перегрузки, более выгодна. Измерение последних осуществляется датчиками перегрузок, Управление ЛА при этом может производиться путем задания необходимой перегрузки, а не угловой координаты.
Движение ЛА вокруг продольной оси X, т.е. движения крена для разных аэродинамических схем, отличаются друг от друга. Для ЛА с аэродинамической симметрией (крестокрылый снаряд), у которого площадь крыльев мала, движение крена можно считать независимым от продольного и бокового движения. В этом случае зависимость крена от поворота элеронов характеризуется функцией передачи
 , (2.21)
, (2.21)
где  - постоянная времени ЛА при повороте его вокруг продольной оси.
- постоянная времени ЛА при повороте его вокруг продольной оси.
Движения крена у таких снарядов приводит к перекрестным связям между каналами продольного и бокового управления, а увеличение крена до 90о нарушает правильное управление, так как руль направления начинает выполнять функции руля высоты и наоборот. В связи с этим все снаряды снабжаются жесткими стабилизаторами крена или устройствами, сохраняющими правильное управление в вертикальной и горизонтальной плоскостях.
ЛА с аэродинамической несимметрией (плоскостная, самолетная схема) обладают способностью восстанавливать свое горизонтальное положение за счет момента, возникающего при скольжении, которое сопутствует крену. В этом случае зависимость крена  от
от  может носить или апериодический, или затухающий колебательный характер. Для обеспечения правильного координированного разворота (боковое движение без скольжения) в таких ЛА также применяются стабилизаторы крена. Они согласуют повороты элеронов и руля направления.
может носить или апериодический, или затухающий колебательный характер. Для обеспечения правильного координированного разворота (боковое движение без скольжения) в таких ЛА также применяются стабилизаторы крена. Они согласуют повороты элеронов и руля направления.
Дата добавления: 2017-09-01; просмотров: 1141;
Поиск по сайту
Узнать еще
- Cдвиг ветра. Воздействие на взлёт и посадку ВС. Рекомендации по выполнению полётов и управлению воздушным движением в условиях сдвига ветра.
- L 5.3 управление акциями по стимулированию продаж, в т.ч. размещение
- Автоматизированное управление работой АПГ
- Автоматизированное управление топливоподачей и топливоприготовлением.
- Автоматическое управление периодическими процессами хим. очистки воды.
- Автоматическое управление работой объектов
- Административно-территориальное управление в России. Создание федеральных органов.
- АНТИКРИЗИСНОЕ УПРАВЛЕНИЕ В БАНКЕ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
