Алгоритмы трассировки печатных плат РЭС
Задача трассировки состоит в построении соединений между выводами элементов, размещенных в заданном монтажном пространстве, в соответствии с электрической принципиальной схемой устройства при учете конструктивных ограничений. Обычно трасса формируется в виде множества связанных отрезков, соединяющих точки электрической цепи. При решении задачи трассировки учитываются следующие критерии:
1) минимальная суммарная длина соединений;
2) минимальное число соединений, длина которых превышает заданное значение;
3) минимальное число переходов между слоями;
4) минимальное число слоев;
5) минимальные паразитные помехи;
6) максимальная удаленность трасс соединений;
7) число слоев не должно превышать заданного значения;
8) длина соединения не должна превышать заданного значения;
9) уровень помех, наводимых в каждой трассе, не должен превышать допустимого значения;
10) число соединений (паек) к одному выводу не должно превышать заданного значения.
При проектировании многослойных структур, как правило, отдельно решается задача оптимального расслоения, в которой минимизируется показатель
 (1)
(1)
где г - номер слоя; z - число слоев; М - число цепей в схеме;  - характеристика степени пересечения k-й и s-й трасс;
- характеристика степени пересечения k-й и s-й трасс;
 если трассы к и s не принадлежат слою r;
если трассы к и s не принадлежат слою r;
если трассы к и s принадлежат слою r.
Характеристика задается различными величинами, например: площадью перекрытия зон реализации цепей аr и as; числом пересечений полных подграфов цепей аr и as; числом пересечений минимальных связывающих сетей аr и as; числом выводов цепей аr и as, принадлежащих пересечению зон реализации этих цепей.
В общей проблеме автоматизации конструкторского проектирования трассировка соединений - это наиболее трудная задача, в которой прослеживается особенно тесная связь с конструктивно-технологической реализацией. Исходной информацией задачи трассировки в общем случае являются:
1) список цепей проектируемой схемы;
2) параметры конструкций элементов (форма и геометрические размеры);
3) параметры монтажного пространства (допустимые расстояния, форма соединений, число пересечений и т.п.);
4) данные по размещению элементов, (трассировка осуществляется между точками, координаты которых заданы в абсолютных или относительных единицах).
Задача трассировки имеет метрический и топологический аспекты. Метрический аспект связан с учетом конструктивных размеров элементов, соединений и монтажного пространства (размещения). Топологический аспект связан с учетом ограничений на число допустимых пересечений, число слоев схемы и т.д., т.е. связан с пространственным расположением отдельных частей и соединений схемы. Алгоритмические методы трассировки, несмотря на их многообразие, не гарантируют проведения 100% соединений. По способу построения трасс методы трассировки разделяют на конструктивные и итерационные.
В последовательных конструктивных алгоритмах трассы цепей проводят в определенном порядке, одну за другой. Обычно прокладку трасс начинают либо с самых длинных соединений, так как в сильно заполненном монтажном пространстве их труднее формировать, либо с самых коротких соединений, которые плотнее заполняют монтажное пространство. Проложенные трассы фиксируют и при дальнейшей трассировке рассматривают как препятствия, т.е. как занятые ячейки монтажного пространства. Таким образом, в последовательных алгоритмах осуществляется локальная оптимизация при прокладке каждой трассы, но в результате после проведения ряда трасс некоторые участки монтажного пространства могут блокироваться, что не позволяет выполнить трассировку автоматически.
В итерационных алгоритмах после прокладки всех трасс, которая осуществляется без учета взаимного влияния трасс, определяется функция качества трассировки как взвешенная сумма параметров трассы (длина, число пересечений, число перегибов). После оценки варианта трассировки наихудшие трассы удаляются, и процесс трассировки повторяется с учетом множества лучших соединений как препятствий.
Для решения задач трассировки разработаны также алгоритмы, в которых объединены последовательные и итерационные процедуры - “мешающие” трассы деформируются или удаляются, т.е. изменяется конфигурация уже проложенных соединений или очередность прокладки трасс.
На рис.1 приведена последовательность применения методов трассировки к различным типам схем и используемые алгоритмы.
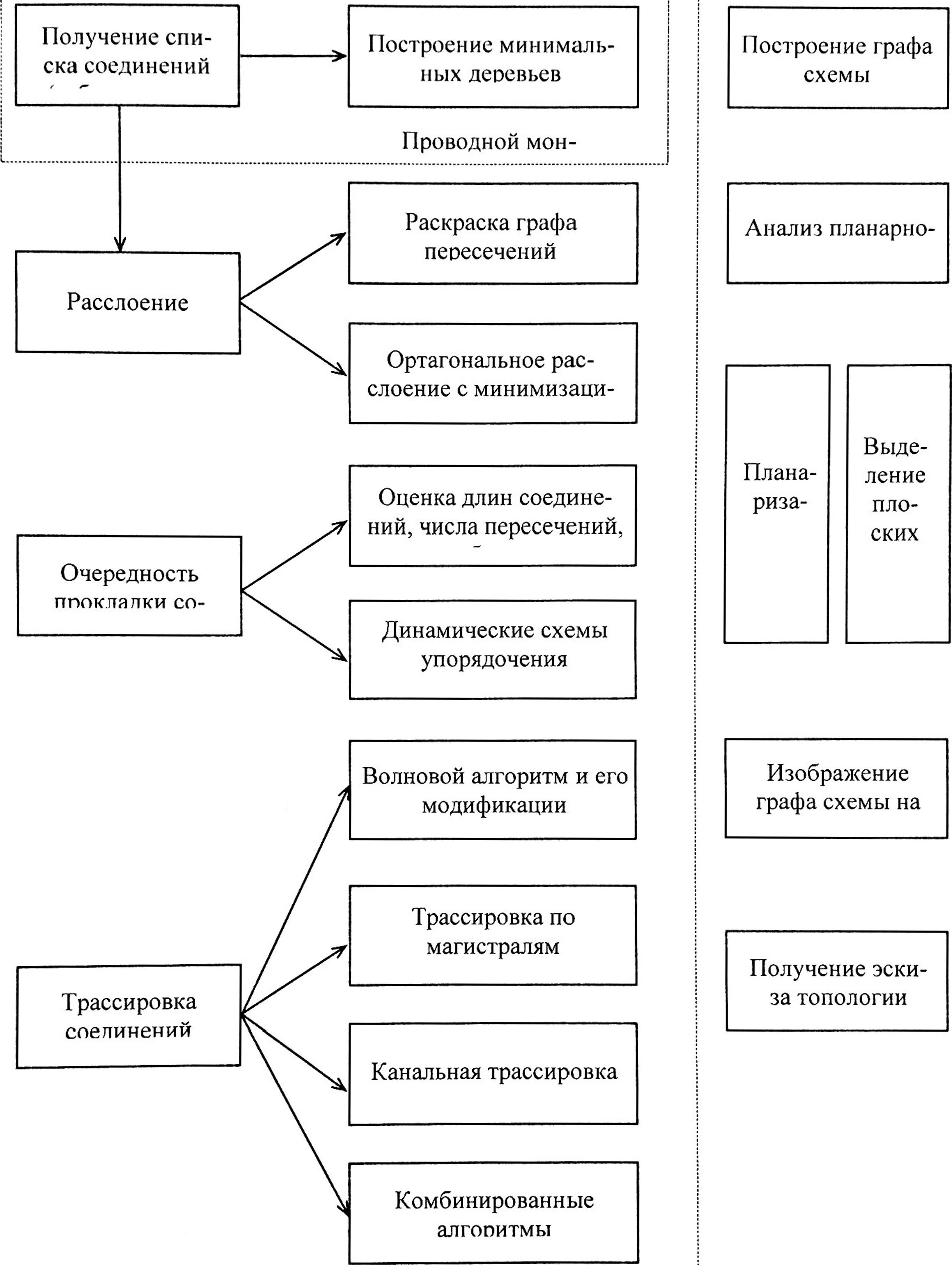 Рис. 1. Последовательность применения методов трассировки к различным типам схем и используемые алгоритмы:
а - схемы регулярные, многослойные, из однотипных элементов (печатный монтаж или многослойные ИС и БИС); б - схемы нерегулярные, из разнотипных элементов (однослойный монтаж на печатных платах, гибридные ИС)
Рис. 1. Последовательность применения методов трассировки к различным типам схем и используемые алгоритмы:
а - схемы регулярные, многослойные, из однотипных элементов (печатный монтаж или многослойные ИС и БИС); б - схемы нерегулярные, из разнотипных элементов (однослойный монтаж на печатных платах, гибридные ИС)
|
Примеры алгоритмов трассировки
Большинство известных универсальных алгоритмов трассировки основывается на волновом алгоритме определения пути (трассы соединений элементов), минимизирующем некоторую многомерную функцию качества этого пути. Идея волнового алгоритма иллюстрируется на рис. 2, где соединяются элементы А и В, расположенные в точках (1, 4) и (4, 7) регулярного монтажного пространства.
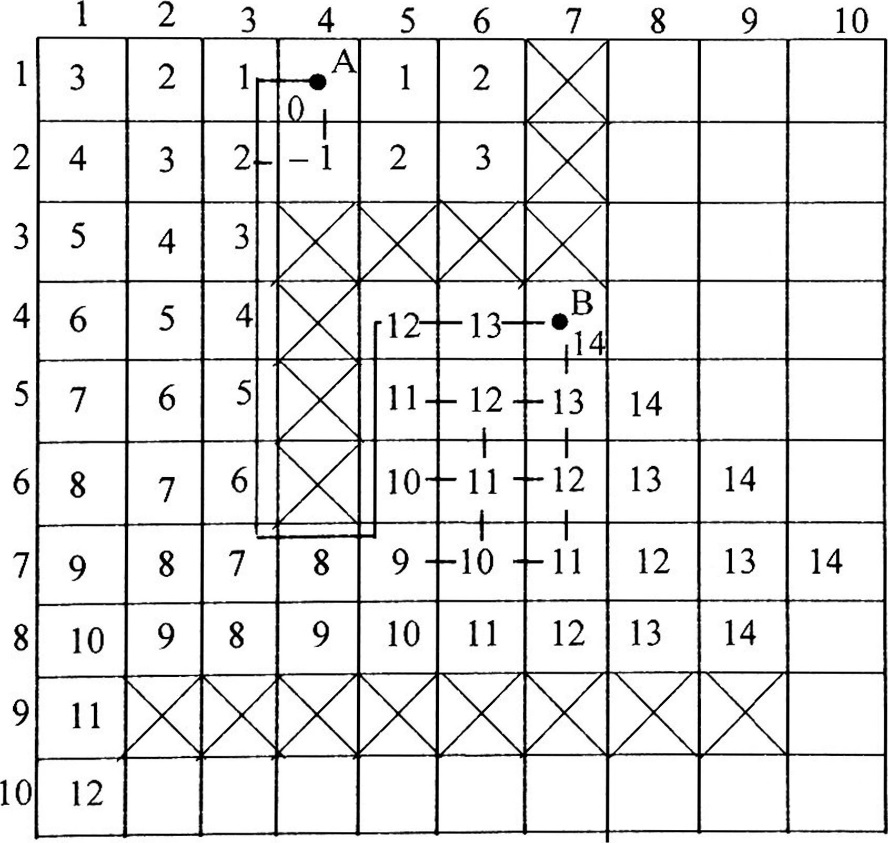
Рис. 2. Трассировка соединений волнового алгоритма при наличии препятствий
Цифрами 0, 1, 2, ..., 14 показаны “фронты” распространения волны от точки (1,4) - состояние 0, до тех пор пока она не достигается точки (4, 7) - состояние 14. Оптимальная трасса получается соединением точек в обратной последовательности 14-13-...-1-0, как трасса, имеющая минимальную длину, минимальное число изгибов и обеспечивающая максимальную плотность монтажа. Штрихами показаны трассы, имеющие ту же длину, но худшие по остальным критериям. Модификации волнового алгоритма направлены на повышение быстродействия и уменьшение требуемого объема памяти.
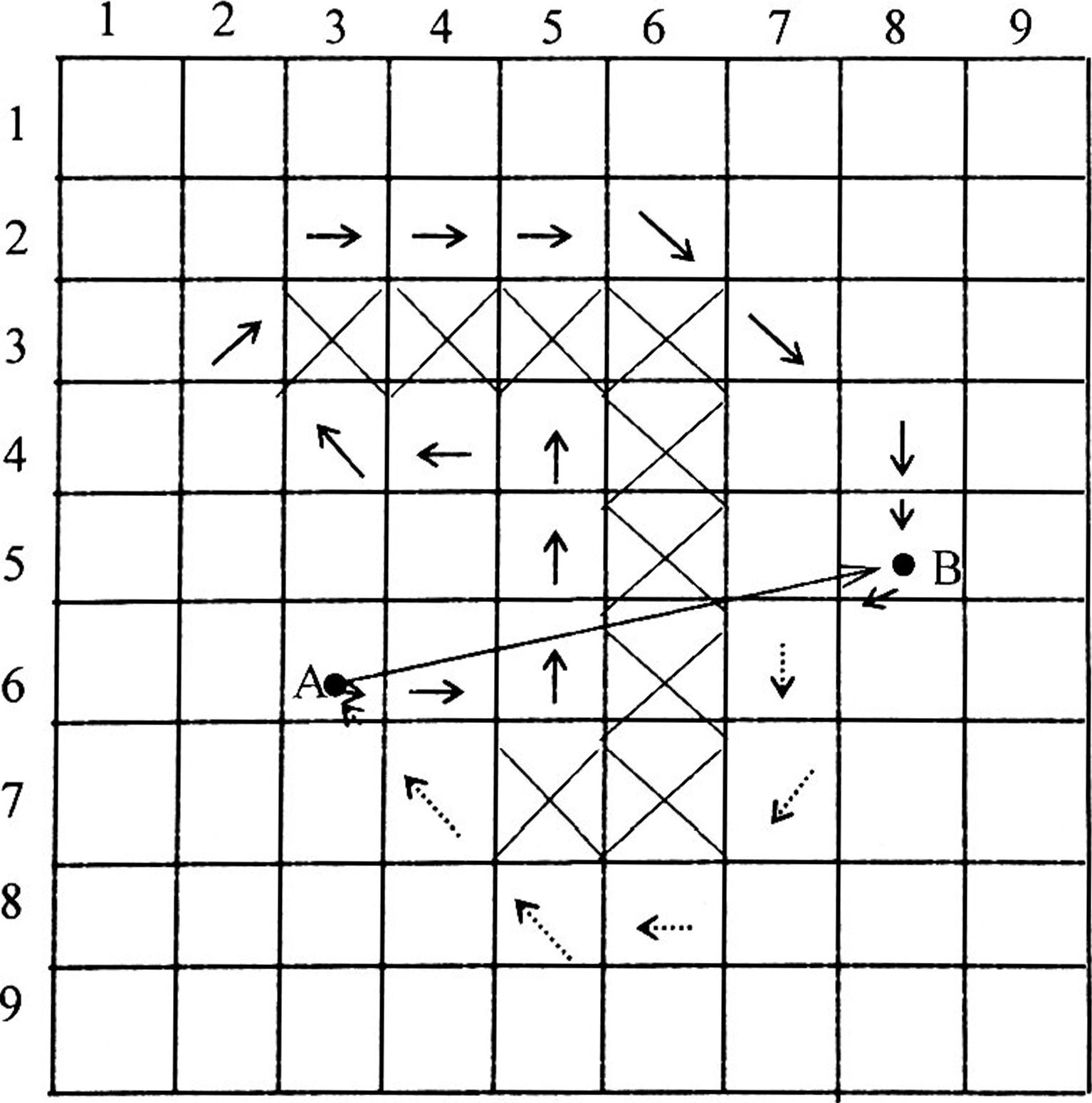
Трассировка с использованием другого эвристического алгоритма - лучевого - показана на рис. 3. Между соединяемыми точками А (6, 3) и В (5, 8) проводится луч. При переходе к следующей точке монтажного пространства определяется направление трассы, минимально отличающейся от направления луча с учетом указанного на диаграмме приоритета (нумерация направлений) и необходимости обхода препятствий, образованных занятыми позициями.
|
Рис. 3. Трассировка соединений лучевым алгоритмом при наличии препятствий
Штриховой линией отмечен оптимальный путь (его длина в два раза меньше первого), проложенный при проведении луча от В к А, т.е. в обратном направлении.
Следует отметить, что приведенные при рассмотрении постановки задачи трассировки критерии оптимальности вводятся не для управления процессом трассировки, а лишь для оценки качества полученного решения.
В ряде случаев делается попытка учесть последующие шаги трассировки и организовать параллельную трассировку всех соединений. Примером являются алгоритмы, использующие канальное представление магистралей межсоединений.
На рис. 4. показана сеть вертикальных В1, В2, В3 и горизонтальных Г1, Г2, Г3 каналов, на которых приведено соединение двух элементов. Монтажное пространство с двумя слоями горизонтальной и вертикальной коммутации и возможностью введения контактных переходов в точках сопряжения горизонтальных и вертикальных слоев типична для устройств, реализуемых на двусторонних печатных платах, а также для больших гибридных и интегральных и монолитных интегральных схем. В алгоритмах, использующих представление о каналах, трассировка осуществляется в два этапа: предварительная, с целью распределения трасс по каналам при равномерной их разгрузке, и окончательная, в процессе которой уточняется расположение соединений на магистралях каналов.
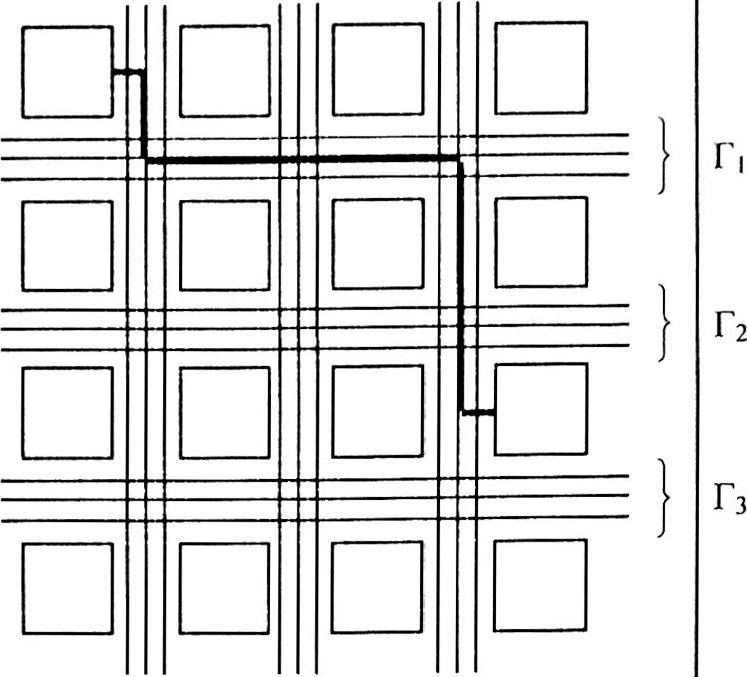
Рис. 4. Трассировка соединений с использованием каналов
Особый тип алгоритмов предназначен для трассировки соединений на плоскости без пересечений. Они используются при проектировании однослойного монтажа при наличии в устройстве разнотипных по форме и размерам элементов.
В связи с тем, что ни один из известных алгоритмов не гарантирует полной трассировки при автоматизированном проектировании, считается целесообразным, чтобы в развитых системах автоматизированного конструкторского проектирования было несколько различных программ трассировки и имелась возможность их совместного использования при решении одной задачи. Оставшиеся непроложенными после трассировки соединения дорабатываются конструкторами вручную или в диалоговом режиме взаимодействия с ЭВМ.
Следует отметить, что при использовании САПР время проектирования топологии устройств, содержащих 20 ... 30 ИС, сокращается приблизительно на порядок, а для БИС практически нет другого способа достижения высокого качества проекта и его документации. Однако большим недостатком современных систем автоматизированного конструкторского проектирования является необходимость огромного объема исходной информации, которая может готовиться порядка нескольких недель для БИС с уже разработанной логической схемой. Для преодоления этого недостатка необходимы создание САПР, соединяющих все этапы проектирования РЭА и имеющих интегрированную базу данных, содержащую инвариантную информацию, пополняемую в процессе разработки, а также стандартизация наиболее рациональных схемотехнических и конструктивных решений.
1.
| <== предыдущая лекция | | | следующая лекция ==> |
| Рессорное подвешивание | | | Основные этапы моделирования |
Дата добавления: 2017-04-05; просмотров: 5291;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
