Их достоинства и недостатки.
Кулачковые механизмы.
Кулачковые механизмы, подобно другим механизмам, служат для преобразования одного вида движения (на входе), изменяющегося по определённому закону, в другой вид движения (на выходе) иного закона с одновременным преобразованием передаваемых силовых параметров (сил, моментов).
Кулачковые механизмы обладают некоторыми важными свойствами, которых нет у рассматриваемых ранее рычажных механизмов. С их помощью можно легко получать прерывистые движения ведомого звена, то есть его движение с остановками, и практически любой закон движения ведомого звена, который определяется в основном профилем кулачка.
Кинематическая цепь простейшего кулачкового механизма состоит из двух подвижных звеньев (кулачка и толкателя), образующих высшую кинематическую пару, и стойки, с которой каждое из этих звеньев входит в низшую кинематическую пару.
Ведущим звеноммеханизма обычно является кулачок, который в большинстве случаев совершает непрерывное вращательное движение. Кулачок обладает сложным профилем, форма которого зависит от заданной схемы механизма и закона движения ведомого звена.
Ведомое звено, называемое толкателем, совершает возвратно-прямолинейное и возвратно-вращательное движение относительно стойки.
Виды кулачковых механизмов.
Их достоинства и недостатки.
На рис. 22.1 даны примеры механизмов. Кулачок I образует высшую кинематическую пару с толкателем 2 (см. рис. 22.1 а, б, г, е) или с роликом 4, шарнирно установленным на толкателе (см. рис. 22.1, в, д, ж, з, и) . Контакт звеньев может быть линейным или точечным. Постоянное соприкосновение элементов высшей кинематической пары осуществляется, как правило, под действием пружины (силовое замыкание). В некоторых механизмах на кулачке выполняют паз (см. рис. 22.1, з, и), внутри которого перемещаемся ролик толкателя (геометрическое замыкание); такие кулачки сложнее изготовить, они имеют большие габариты.
Обычно кулачок совершает вращательное движение, которое преобразуется в возвратно-поступательное прямолинейное или в возвратно-вращательное движение толкателя. В некоторых механизмах кулачок совершает возвратно-поступательное движение (см. рис. 22.1, ж). В плоских кулачковых механизмах, как правило, применяются дисковые кулачки (см. рис. 22.1, а, …, е, и), в пространственных - цилиндрические (см. рис. 22.1, з), конические, сферические, глобоидальные. Для снижения износа элементов высшей кинематической пары и для уменьшения потерь на трение – вместо заостренных толкателей (см. рис. 22.1, а) применяют толкатели с закругленным концом (см. рис. 22.1, б), плоские (см. рис. 22.1, е) или роликовые (см. рис. 22.1, в, д, ж, з, и) .
В плоских механизмах с прямолинейно движущимся толкателем последний может быть центральным (см. рис. 22.1, г, и) или внеосным (см. рис. 22.1, а, в).
Кулачковые механизмы широко используются в самых различных машинах, где требуется автоматически осуществлять согласованные движения выходных звеньев: в металлорежущих станках, в автоматах и автоматических линиях, для привода клапанов двигателей и других энергетических машин; во многих приборах и аппаратах. Однако основной недостаток кулачковых механизмов - возможность возникновения больших контактных напряжений в высшей паре, не позволяет применять их в главных кинематических цепях для передачи большой мощности. Поэтому кулачковые механизмы, как правило, используют во вспомогательных цепях, выполняющих функции управления, где передаваемые мощности невелики.
Наибольшее распространение получили кулачковые механизмы с прямолинейно движущимся роликовым толкателем (см. рис. 22.1, в) и с коромысловым роликовым толкателем (см. рис. 22.1, д).
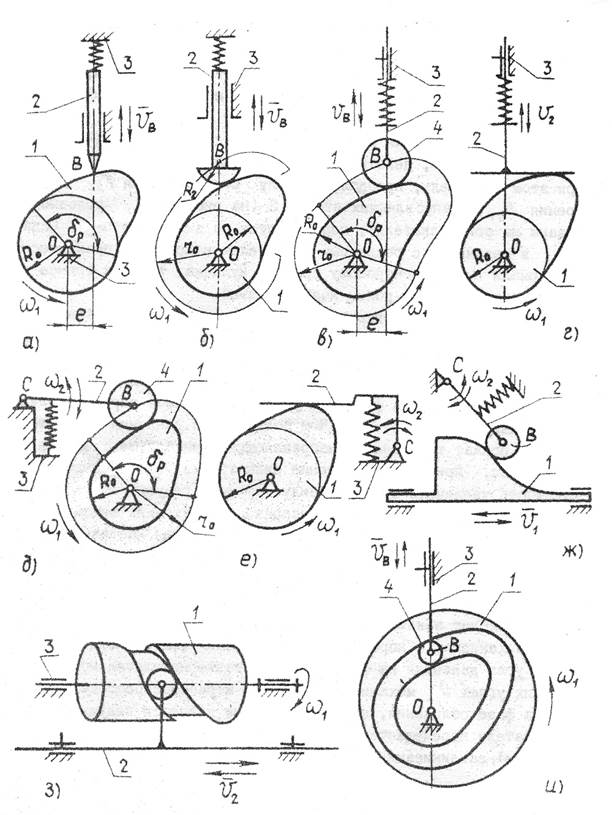 |
Рис. 22.1
Дата добавления: 2017-02-13; просмотров: 3737;
Поиск по сайту
Узнать еще
- АЦП последовательного счета с предварительным преобразованием напряжения во временной интервал: схема, работа, достоинства, недостатки.
- Вопрос 3. Преимущества и недостатки.
- ВОПРОС 41. РЕМЕННЫЕ ПЕРЕДАЧИ. ПРИНЦИП ДЕЙСТВИЯ И КЛАССИФИКАЦИЯ. ПРЕИМУЩЕСТВА И НЕДОСТАТКИ.
- Достоинства архитектуры с микроядром
- Достоинства и недостатки
- Достоинства и недостатки
- Достоинства и недостатки древесины как строительного материала
- Достоинства и недостатки железобетонных конструкций

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
