Балансировка роторов при различных видах неуравновешенности
1. Статическая неуравновешенность
Статическая неуравновешенность свойственна такому ротору, центр масс S которого не находится на оси вращения, но главная центральная ось инерции (I - I) которого параллельна оси вращения. В этом случае `ест ¹ 0, и главный вектор дисбалансов `Dст ¹ 0. Главный момент дисбалансов ротора `MD = 0. Статическая нуравновешенность выражается только главным вектором дисбалансов. Он направлен радиально и вращается вместе с ротором.
|
Примером может служить коленчатый вал одноцилиндровой машины, ротор крыльчатки со смещенной осью вращения.
 ;
;

 .
.
Величина  может значительно превышать G , если будут значительными w или ест. Например: если G =10 H. m = G/g = 1кг, ест. = 0,1 мм, w = 100 рад/с, то = 104 × 1 × 0,1 = 103 Н, т.е. в 1000 раз больше статической нагрузки ротора на его опоры.
может значительно превышать G , если будут значительными w или ест. Например: если G =10 H. m = G/g = 1кг, ест. = 0,1 мм, w = 100 рад/с, то = 104 × 1 × 0,1 = 103 Н, т.е. в 1000 раз больше статической нагрузки ротора на его опоры.
Статическая неуравновешенность может быть устранена, если к ротору прикрепить добавочную массу mк, так называемую корректирующую массу. Ее нужно разместить с таким расчетом, чтобы  . Корректирующая масс определяется: mk = Dk / eК, где величиной eКзадаются из соображений удобства размещения противовесов. Направление вектора `DК противоположно направлению `Dст. Центр корректирующей массы должен находиться на линии действия вектора `Dст, а вектор `eК должен быть направлен в сторону противоположную `ест.
. Корректирующая масс определяется: mk = Dk / eК, где величиной eКзадаются из соображений удобства размещения противовесов. Направление вектора `DК противоположно направлению `Dст. Центр корректирующей массы должен находиться на линии действия вектора `Dст, а вектор `eК должен быть направлен в сторону противоположную `ест.
Однако статическую балансировку не всегда конструктивно удается выполнить одной корректирующей массой. Так для конструкции одноколенчатого вала применяют две плоскости коррекции, а пространство между этими плоскостями оставляют свободным для движения шатуна. В этом случае  .
.
Обычно  , а
, а  .
.
2. Моментная неуравновешенность
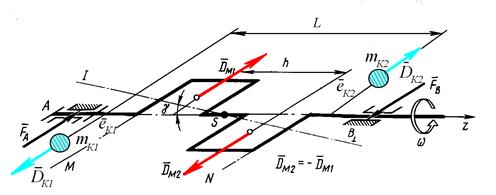
Моментная неуравновешенность имеет место в том случае, когда центр масс S находится на оси вращения, а главная центральная ось инерции I-I наклонена к оси вращения ротора под углом g (рис. 11. 4)
В этом случае `ест = 0, следовательно `Dст = 0, так что моментная неуравновешенность выражается только лишь главным моментом дисбалансов `MD, т.е. парой дисбалансов `Dм1 и `Dм2, которая вращается вместе с ротором. Примером может служить двухколенчатый вал, для которого `MD =`MD × h. Опоры А и В нагружены парой сил (`FA , `FB), векторы которых вращаются вместе с валом.
|
Рис. 11. 4
Так как пара сил уравновешивается только парой, то устранить моментную неуравновешенность можно в том случае, если применить не менее чем две корректирующие массы. Их расположение в плоскостях коррекции и их величины должны быть такими, чтобы дисбалансы корректирующих масс mК1 и mК2 составили бы именно пару `DК1 и `DК2 .Массы выбираются и размещаются так, чтобы момент их дисбалансов `MDК был по величине равен, а по направлению противоположен моменту дисбалансов ротора: `MDk = - `МD , `MDК = `DК1× LК + `DК2 × LК = `MDК1 + `MDК2,
где `DК = mК× `eК .
3. Динамическая уравновешенность
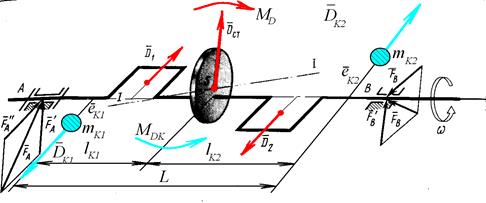
Динамическая уравновешенность является совокупностью двух предыдущих. При динамической неуравновешенности главная центральная ось инерции ëèáî пересекает ось вращения не в центре масс ротора точке S, либо перекрещивается с ней; и главный вектор дисбалансов `Dст , и главный момент дисбалансов `МD не равны нулю (рис. 11. 5):`Dст ¹ 0, `МD ¹ 0. т.е. необходимо уравновесить вектор `Dст и момент дисбалансов `МD.
|
Рис. 11. 5
Для этого достаточно разместить на роторе две корректирующие массы mК1 и mК2 на расстояниях от оси вращения eК1 и eК2 , а от центра масс S, соответственно на lК1 и lК2. Массы выбираются и размещаются так, чтобы момент их дисбалансов `MDК был по величине равен, а по направлению противоположен моменту дисбалансов ротора `МD:
`MDК = - `МD , `MDК = `DК1× lК1 + `DК2 × lК2 = `MDК1+ `MDК2 ,
где `DК1 = mК1×`eК1 и `DК2 = mК2×` eК2,
а векторная сумма дисбалансов была равна и противоположно направлена вектору `Dст: `Dст = - `DК = - (`DК1 + `DК2 ) .
В этих зависимостях величинами lКi и eКi задаются из условий удобства размещения противовесов на роторе, а величины mКi рассчитывают.
Из вышеизложенного следует, что ликвидация всякой неуравновешенности – и статической, и моментной, и динамической – имеет своим результатом то, что главная центральная ось инерции ротора совмещается с его осью вращения, или аналитически `Dст = 0, `МD = 0 . В этом случае ротор называется полностью сбалансированным. Отметим важное свойство такого ротора: если ротор полностью сбалансирован для некоторого значения угловой скорости, то он сохраняет свою полную сбалансированность при любой другой угловой скорости, как постоянной, так и переменной.
Дата добавления: 2017-02-13; просмотров: 1891;
Поиск по сайту
Узнать еще
- Appeal –привлекательность.
- Applications (приложения)
- Cила резания при точении
- Cущность организации и ее основные признаки
- D-технология построения чертежа. Типовые объемные тела: призма, цилиндр, конус, сфера, тор, клин. Построение тел выдавливанием и вращением. Разрезы, сечения.
- D-элементы, их применение в медицине и фармации.
- F50 Расстройства приема пищи
- He рекомендуем использовать данный метод, если в дальнейшем будет необходимость прибегнуть к отгибу приборной панели.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
