Принцип функционирования ВРМ
В настоящее время наибольшее распространение получили ВРМ VOR доплеровского типа (DVOR) и его разновидность - маяки повышенной точности их называют еще прецизионными (PDVOR). По принципу действия они одинаковы и аналогичны принципу действия наземных пеленгаторов доплеровского типа.
На рис.49 представлена схема антенной системы фазового радиомаяка.
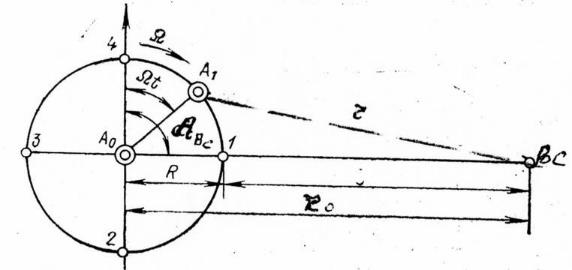
Рис.33. Антенная система фазового радиомаяка
Рис. 49. Схема антенной системы ВРМ
Она состоит из неподвижной центральной антенны А0 и подвижной антенны А1, которая вращается по окружности радиуса R c постоянной скоростью Ω. Если антенна А1 излучает сигнал е1 = Еm1·sin0t , то в точке приема на ВС этот сигнал будет иметь вид:
евс = Еm·sin0(t - tз),
где - tз = r/c - время запаздывания сигнала при прохождении им расстояния r между ВРМ и ВС.
При вращении антенны А1 расстояние r изменяется по закону
r = r0 - R· сos (Ωt - Авс),
где: R - радиус окружности вращения антенны А1;
Авс - азимут ВС;
Ω - угловая скорость вращения антенны А1 (Ω = 2πF).
Таким образом, принятый на ВС сигнал будет иметь переменную фазу и, как следствие, частоту, которая равна ω = dφ/dt.
Cигнал, принимаемый на ВС, окончательно будет иметь вид
евс = Em· sin { ω0t - (ω0/c) ·[r0 - R· cos (Ωt - Авс)]}.
Частота этого сигнала будет равна
ω=ω0 - (2π/ λ) ·Ω·R· sin (Ωt- Авс).
Таким образом, сигнал, принимаемый на ВС, представляет частотно-модулированное колебание, причем начальная фаза модуляции частоты равна азимуту ВС. Измеряя фазу модуляции можно определить азимут ВС. Поскольку изменение частоты сигналов, принимаемых на ВС, обусловлено доплеровским сдвигом, возникающим из-за движения антенны А1 относительно ВС, радиомаяки получили название доплеровских.
Неподвижная антенна А0 служит для излучения опорного сигнала частоты Ω, фаза которого не зависит от азимута ВС относительно маяка.
На борту ВС после приема и преобразования выделяются два сигнала: - опорный Uоп = Um· cos Ωt и “рабочий ” - Uр = Um·cos(Ωt- Авс). При Авс = 00 фазы этих сигналов равны, в любом другом направлении они будут различны. Таким образом, процесс измерения азимута на борту заключается в сравнении фаз двух сигналов - “рабочего” и опорного
Авс = φр - φоп.
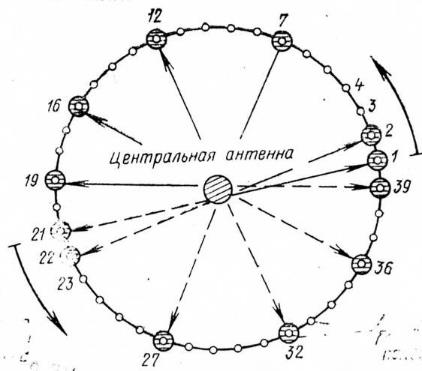 В реальных маяках механическое вращение боковой антенны А1 заменяется последовательным подключением вибраторов, расположенных на окружности заданного радиуса R (рис.50). Радиус окружности R = 6,6м, количество вибраторов N = 39. Вибраторы работают попарно (1-21;2-22; …12-32;19-39).
В реальных маяках механическое вращение боковой антенны А1 заменяется последовательным подключением вибраторов, расположенных на окружности заданного радиуса R (рис.50). Радиус окружности R = 6,6м, количество вибраторов N = 39. Вибраторы работают попарно (1-21;2-22; …12-32;19-39).
Рис. 50. Схема коммутации вибраторов антенны ВРМ
Прием сигналов РМ VOR на борту осуществляется навигационно-посадочным оборудованием системы "Курс-МП", в котором имеется два независимых канала, позволяющих одновременно измерять МПС по двум РМ. Результаты измерения отображаются с помощью двухстрелочного радиомагнитного индикатора РМИ-2Б или индикаторов аналогичного типа.
В таблице 9 приведены основные эксплуатационно-технические характеристики типовых ВРМ.
Таблица 9
| ВРМ | VOR | DVOR | PVOR | PDVOR | РМА-90 |
| Погрешность измерения азимута (2s), град | 3,6 (до 5) (20-РМ;30-БО) | 1…2 | - | 1…2 | |
| Дальность действия, км: | |||||
| трассовые ВРМ при Нэш = 10000м | |||||
| аэродромные | |||||
| Число рабочих каналов |
Дата добавления: 2017-01-08; просмотров: 2146;
Поиск по сайту
Узнать еще
- I. Общие принципы структурно-функциональной организации клетки и её компоненты. Плазмолемма, её структура и функции.
- I. Этические принципы психолога
- II. Общие методические принципы в канистерапии
- II. Получение вращающегося магнитного поля и принцип действия АД.
- II. Принцип действия и режимы работы синхронной машины
- II. Электрическая схема и принцип действия.
- III. Принцип действия
- III. Принцип удовольствия

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
