Оптимальные автоматические системы
Управления
В обычных автоматических системах управления требуемое значение управляе-мой величины задавалось заранее либо постоянным (в системах стабилизации), ли-бо изменяющимся по заданной программе во время (системы программного управ-ления). Оптимальные системы управления сами ищут наивыгоднейшую програм-му, т.е. значение управляемой величины, которое нужно в данный момент выдер-живать, чтобы режим работы управляемого объекта был оптимальным (наивыгод-нейшим). Обязательным условием оптимальной системы управления является на-личие экстремума (максимума или минимума). Поэтому эти системы иногда назы-вают экстремальными по оптимизируемому параметру. Эта характеристика пред-ставляет собой зависимость оптимизируемого параметра от управляемой вели-чины. Экстремальной, например, является зависимость расхода горючего Q в дви-гателе от скорости его вращения n при постоянной нагрузке M  . Для широкого диапазона нагрузок возьмём семейство экстремальных характеристик, каждая из которых имеет свой экстремум Q (рис. 37).
. Для широкого диапазона нагрузок возьмём семейство экстремальных характеристик, каждая из которых имеет свой экстремум Q (рис. 37).
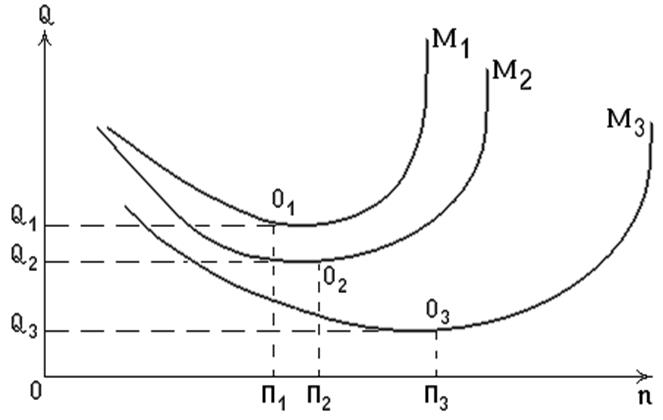
Рис. 37. Семейство экстремальных характеристик объекта.
Задачей оптимальной автоматической системы управления в данном случае яв-ляется обеспечение минимального расхода горючего Q при различных нагрузках двигателя M . Устройство автоматического поиска экстремума, называемое опти-мизатором, ищет минимальное значение расхода горючего при данной нагрузке (например, расход Q  при нагрузке M ) и определяет значение управляющего воздействия n , которое обеспечивает требуемый оптимум. Сигнал с выхода оп-тимизатора n может быть подан в виде задания регулятору (рис. 38).
при нагрузке M ) и определяет значение управляющего воздействия n , которое обеспечивает требуемый оптимум. Сигнал с выхода оп-тимизатора n может быть подан в виде задания регулятору (рис. 38).
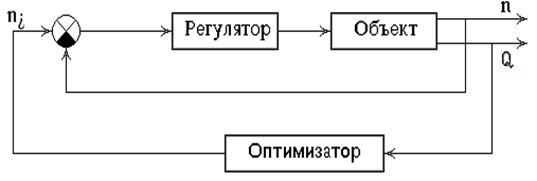
Рис. 38. Структурная схема автоматической
системы оптимального регулирования.
Оптимизаторы отличаются друг от друга способом поиска экстремума. Один из них называется способом последовательных шагов (рис. 39). Пусть ищется максимум экстремальной характеристики. Сначала даётся принудительное изменение величины x в какую-либо сторону на  . Если получившаяся разность z
. Если получившаяся разность z  – z
– z  > 0, то дают новое приращение xна величину в ту же сторону. Если z – z < 0, то производится переключение направления изменения x в обратную сторону на такой же шаг и т.п. В результате система будет колебаться около точки экстремума x
> 0, то дают новое приращение xна величину в ту же сторону. Если z – z < 0, то производится переключение направления изменения x в обратную сторону на такой же шаг и т.п. В результате система будет колебаться около точки экстремума x  . Существуют и другие способы поиска экстремума.
. Существуют и другие способы поиска экстремума.
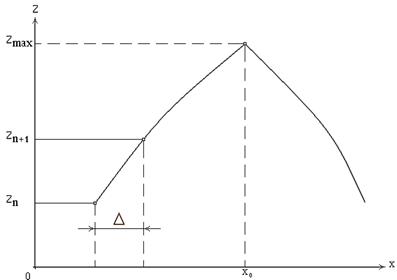
Рис. 39. Поиск максимума методом последовательных шагов.
Итак, оптимальные системы управления отличаются от обычных тем, что в них производится автоматическая настройка требуемого значения параметра.
Дата добавления: 2021-04-21; просмотров: 435;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее
- T-FlexCAD (Топ Системы, Москва) и др.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
