Способы борьбы с помехами в устройствах НРЭС
5.4.1. Основные характеристики помех
В НРЭС действуют внутренние (внутри аппаратуры) и внешние (из атмосферы) помехи. В результате действия помех (как правило они складываются с сигналом) форма сигнала искажается и правильный прием информации затрудняется. Способность НРЭС противостоять помехам называется помехоустойчивостью.
Для оценки помехоустойчивости используют различные характеристики в зависимости от вида передаваемой информации. Так при передаче аналоговых РНП ее качество оценивается отношением уровня сигнала к уровню помех, определяющим качество их восстановления в ОУ. При передаче дискретных (цифровых) РНП качество передачи оценивается коэффициентом ошибок (Кош) — отношением числа ошибочно принятых знаков (Nош) к общему числу переданных знаков (Nоб):
Кош = Nош/ Nоб. (5.18)
Источниками шумов в усилителе могут быть:
– все активные сопротивления;
– усилительные изделия (лампы, транзисторы);
– контуры.
Необходимо также учитывать шум источника входного сигнала усилителя.
Шумы, возникающие за счет хаотичного движения носителей электрических зарядов, называются тепловыми шумами. Они создаются за счет беспорядочно изменяющегося напряжения (UТШ), возникающего на концах любого проводника, цепи, элемента схемы, вследствие беспорядочного теплового движения в них электронов. Это напряжение зависит от сопротивления цепи (RЦ), температуры окружающей среды и полосы частот (ΔFп), в которой измеряется шумовое напряжение. Так, напряжение тепловых шумов любой цепи при температуре 15–20 ºС определяется выражением
 |
UТШ = 0,13 √ ΔFп Rц , (5.19)
где ΔFп измеряется в кГц, Rц — в кОм.
В транзисторах шумы возникают по следующим причинам. На низких частотах шумы, изменяющиеся обратно пропорционально частоте 1/F, обусловленные дробовым эффектом (неравномерное излучение зарядов эмиттером), зависят от процессов, протекающих на поверхности кристалла. Тепловое движение носителей зарядов внутри кристалла создает тепловой шум. Таким образом, основными видами шумов в транзисторах являются тепловые шумы и шумы распределения.
Уровень шумов транзистора, и в целом усилителя, характеризуется коэффициентом шума (Nш), равным отношению полной мощности выходных шумов усилителя к ее части, создаваемой шумами источника сигнала.
Напряжение шума на выходе усилителя выражается через коэффициент шума следующей формулой:
 UшвыхмкВ = 0,13 √ ΔFп Rи Nш.ср , (5.20)
UшвыхмкВ = 0,13 √ ΔFп Rи Nш.ср , (5.20)
где Nш. ср — величина среднего коэффициента шума для полосы частот;
Rи — сопротивление источника сигнала (кОм);
ΔFп — величина полосы пропускания усилителя.
Основными причинами собственных помех усилителя являются: наводки, фон, микрофонный эффект, собственные шумы активных элементов.
Наводки — паразитные сигналы, возникающие под действием электромагнитных возмущений и проходящие по связям, не предусмотренным назначением и конструкцией аппаратуры. Наводки возникают при работе внешних приборов, электродвигателей, а также из-за влияния цепей самого усилителя. Устранение наводок достигается экранированием усилителя и его цепей, а также применением развязывающих фильтров в цепях питания.
Фон – это шум на выходе усилителя, питаемого от сети переменного тока, представляет собой спектр составляющей частоты питающей сети и ее гармоник. Основными причинами фона являются:
– недостаточное сглаживание выпрямленного напряжения питания;
– наведение переменной ЭДС в цепях усилителя электрическими и магнитными полями питающих трансформаторов и соседними приборами.
Для устранения или уменьшения фона улучшают сглаживание напряжения источника питания, экранируют цепи усилителя, удаляют их от источников фона, а также применяют автоматическую регулировку усиления (АРУ).
Микрофонный эффект — нежелательное изменение параметров электрической, магнитной цепи или электронного прибора, вызванное механической вибрацией или акустическим воздействием. В результате этого эффекта на выходе усилителя может появиться постороннее напряжение, вызванное толчками, ударами, вибрацией. Микрофонному эффекту в большей степени подвержены лампы. Для устранения этого явления в первых каскадах применяются усилительные элементы с малым микрофонным эффектом (например, транзисторы), а также применяется амортизация и звукоизоляция усилительных элементов.
5.4.2. Способы подавления помех до детектора
В принципе, все способы борьбы с помехами в ПРМ до детектора направлены на повышение отношения сигнал/помеха за счет использования различий в характеристиках их параметров:
- повышение выходной мощности ПРД (повышается уровень радиосигналов на входе АПРМ в сравнении с внешними помехами);
- увеличение направленности излучения АПРД (тот же эффект);
- согласование полосы пропускания ПРМ с полосой частот сигнала (уровень помех снижается из-за более широкой полосы их спектра);
- использование в УВЧ схем АРУ.
АРУ позволяют поддерживать амплитуду сигнала на выходе усилителя в заданных пределах или на заданном уровне. Поэтому традиционно АРУ широко используется в ПРМ для удержания уровня сигнала в пределах выходного АДД их УВЧ, что необходимо при большом динамическом диапазоне изменения амплитуды входного сигнала, достигающего, например, в радиолокационных приемниках 70–100 дБ. Такой динамический диапазон сигнала обычно существенно превышает входной АДД УВЧ, что приводит к его насыщению и сведению соотношения сигнал/помеха к нулю.
Цепь АРУ вырабатывает регулирующее напряжение, управляющее коэффициентом усиления одного или нескольких каскадов УВЧ. Зависимость коэффициента усиления усилителя от управляющего напряжения называют регулировочной характеристикой.
В зависимости от способа подключения цепи АРУ к УВЧ различают:
– АРУ без обратной связи («АРУ вперед»);
– АРУ с обратной связью («АРУ назад»);
– программная АРУ.
«АРУ вперед» может обеспечивать хорошую стабилизацию амплитуды выходного сигнала УВЧ при изменении входного сигнала в широких пределах, однако к цепи АРУ предъявляется требование высокой стабильности ее параметров. Такая АРУ имеет в своем составе усилитель АРУ (УАРУ), детектор АРУ (ДАРУ) и ФНЧ, выделяющий постоянную составляющую ЭК, управляющую коэффициентом усиления УВЧ по принципу – чем больше амплитуда управляющего напряжения, тем меньше коэффициент усиления (рис.5.18). ЭК для такой АРУ берется с входа УВЧ или после его МШУ
 |
На практике наибольшее распространение получили системы АРУ с обратной связью, среди которых выделяют задержанные АРУ, которые начинают действовать от определенного уровня ЭК (Uз) на выходе УПЧ (рис.5.19).
По быстродействию системы АРУ подразделяются на инерционные (ИАРУ), быстродействующие (БАРУ) и мгновенные (МАРУ).
ИАРУ характеризуются сравнительно большим временем срабатывания, превышающим период следования сигнала и таким образом следят за средним уровнем сигнала или шума (рис.5.19). Выходное напряжение УПЧ поступает на вход ДАРУ, затем продетектированный сигнал подается через ФНЧ на УПТ, выходной сигнал которого суммируется с напряжением задержки Uз и поступает в УПЧ для управления коэффициентом усиления. Эффект стабилизации амплитуды выходного напряжения достигается за счет того, что с ее ростом увеличивается также управляющее напряжение, под действием которого уменьшается коэффициент усиления УПЧ, что приводит к снижению уровня входного сигнала. ФНЧ в цепи АРУ выделяет постоянную составляющую ЭК, поэтому на выходе УПЧ стабилизируется среднее значение выходного ЭК.
Разновидностью ИАРУ является шумовая АРУ (ШАРУ) поддерживающая постоянным средний уровень шума на выходе ПРМ. ШАРУ предназначена для поддержания неизменным среднего уровня шумового напряжения на выходе УПЧ при значительном изменении интенсивности шумовой помехи на его входе. Особенность ШАРУ состоит в том, что входным возмущением цепи ШАРУ является не сигнал, а шум, поэтому в цепь ШАРУ включается селектор шума (ключ), открываемый стробирующими импульсами, пропускающими на вход ШАРУ только выборки шума (рис.5.20).
 В программной АРУ регулирующее напряжение создается по заранее определенному закону. Такие АРУ используются, если известен закон изменения среднего уровня сигнала на входе приемника. Примером такой является временная автоматическая регулировка усиления (ВАРУ).
В программной АРУ регулирующее напряжение создается по заранее определенному закону. Такие АРУ используются, если известен закон изменения среднего уровня сигнала на входе приемника. Примером такой является временная автоматическая регулировка усиления (ВАРУ).
ВАРУ представляет собой устройство формирования управляющего напряжения по заранее известному закону изменения средней величины амплитуды помехи во времени, работа которого синхронизируется во времени внешним синхроимпульсом (UСИ). ВАРУ широко применяются в СРЛС для подавления помехи от моря, среднее значение амплитуды которой уменьшается с увеличением дальности (рис.5.21).
 Под действием ВАРУ коэффициент усиления УПЧ (КU) изменяется во времени соответственно изменению среднего значения амплитуды помехи от моря на его входе (Uвх), в связи с чем оно стабилизируется и исключает насыщение УПЧ.
Под действием ВАРУ коэффициент усиления УПЧ (КU) изменяется во времени соответственно изменению среднего значения амплитуды помехи от моря на его входе (Uвх), в связи с чем оно стабилизируется и исключает насыщение УПЧ.
БАРУ представляют собой малоинерционную систему с постоянной времени, соизмеримой с длительностью сигнала. Принцип работы БАРУ аналогичен принципу работы инерционной АРУ; разница между ними заключается в скорости срабатывания. Скорость изменения усиления УПЧ системой БАРУ соответствует скорости изменения амплитуды импульсной помехи. Вместе с тем БАРУ не должна реагировать на полезные сигналы. В этом смысле усилитель с БАРУ эквивалентен фильтру верхних частот.
МАРУ является наиболее эффективным методом защиты ПРМ от перегрузки импульсной помехой. Схема МАРУ отличается от обычной схемы АРУ тем, что она реагирует на каждую поступающую импульсную помеху. МАРУ часто применяется в приемниках СРЛС для предупреждения насыщения ПРМ импульсными сигналами очень большой амплитуды (отражения от берега, близких больших судов и др.). МАРУ почти мгновенно срабатывают под воздействием помехи, уменьшая на время ее действия коэффициент усиления нескольких каскадов УПЧ. Сразу поле исчезновения помехи чувствительность приемника полностью восстанавливается, и он может принимать слабые сигналы.
По типу элементной базы различают аналоговые и цифровые АРУ. Цифровая АРУ (ЦАРУ) содержит вычислительное устройство, формирующее кодовые сигналы управления.
5.4.3. Подавление помех после детектора
5.4.3.1. Применяемые способы
Для борьбы с помехами после детектора применяются:
– пропускание принятого сигнала через цепь с малой постоянной времени (МПВ) — дифференцирующая RC-цепочка;
– стабилизация уровня помех в ОУ;
– коды с исправлением ошибок приема информации в ОУ;
– кодирование технических параметров, излучаемых РЧ РИ с последующим их декодированием в ПРМ.
5.4.3.2. Применение цепочки МПВ
Для стабилизации среднего значения уровня помех на выходе детектора ПРМ можно использовать цепочку МПВ, которая содержит конденсатор, не пропускает постоянную составляющую поступающего на него ЭК (рис. 5.22).
 Величина постоянной времени RC-цепочки τц определяется выражением
Величина постоянной времени RC-цепочки τц определяется выражением
τц= RC, (5.21)
где R и C — величины, соответственно, сопротивления и емкости цепи.
МПВ означает
τц<< τи,(5.22)
где τи— величина длительности поступающего на RC-цепочку отрезка ЭК постоянного уровня (прямоугольного ВИ).
МПВ широко применяется в ПРМ аналоговых СРЛС для борьбы с помехами от метеоосадков и берегов в ВУ.
Из рис.5.22 видно, что при выключенной цепочки МПВ помехи от моря и дождя насыщают ВУ приемника и выталкивают сигнал в область его насыщения, в связи с чем соотношение сигнал/шум на выходе ВУ становится равным нулю. ВАРУ вводит помеху и сигнал в пределы динамического диапазона ВУ, устраняет его насыщение и сохраняет сигнал (в смеси с помехой) для его дальнейшей обработки в ОУ.
В сравнении с ВАРУ эффективность МПВ заметно ниже, т. к. она дифференцирует принятые сигналы — пропускает только их передние фронты (см.рис.5.22). В результате этого уменьшается энергия помех от дождя, берегов и поверхности моря, но ВС (в смеси с помехой) от встречных судов и других надводных объектов резко сокращаются по длительности, в связи с чем обеспечивается радиолокационное наблюдение только очень крупных надводных целей на фоне помех от дождя и моря. Для повышения эффективности МПВ в СРЛС вводят регулировку величины ее τц, увеличивая которую переходят к частичному дифференцированию, что увеличивает энергию ВС, но также повышает и амплитуду помех от дождя, берегов и поверхности моря. Поэтому указанная регулировка оказывается эффективной только при небольшой интенсивности указанных помех.
5.4.3.3. Цифровые способы подавления помех в ОУ
В ОУ современных НРЭС применяются процессоры для преобразования РНП в НП (ПНП и ВНП), на которые также возлагают функцию дополнительного устранения помех, оставшихся после подавления в ПРМ. Естественно, для подачи в процессор поступившие из ПРМ сигналы (в смеси с помехами) прогоняют через АЦП и далее их обработку в процессоре реализуют программным способом.
Сущность подавления помех в ОУ цифровым методом аналогична аналоговому детектору (см.5.3.2):
1)в привязке к текущему времени (в динамике) вырабатывается среднее значение амплитуды помехи Ūп(t);
2) определяется порог обнаружения UПО –
UПО(t) = Ūп(t) + ΔПО, (5.23)
где ΔПО— добавка к порогу обнаружения, зависящая от назначенной вероятности ложной тревоги;
3) вычитается текущее значение порога обнаружения UПО(t)из текущего значения амплитуды принимаемого ЭК.
Рассмотрим пример реализации указанной процедуры в цифровых СРЛС, осуществляемой применением «скользящего окна» длительностью К дискрет времени и пошагово (по дискретам) перемещающегося по оси времени, начиная с нулевого значения времени (рис.5.23). При каждом шаге в «скользящем окне» выполняется следующая последовательность обработки ЦС:
 1) вырабатывается значение Ūпn для n-го дискрета как среднее значение амплитуд ЦСUЦСn, находящихся в «скользящем окне»:
1) вырабатывается значение Ūпn для n-го дискрета как среднее значение амплитуд ЦСUЦСn, находящихся в «скользящем окне»:
Ūпn = Σ UЦСn/ К; (5.24)
2) рассчитывается величина порога обнаружения для n-го дискрета UПОn по формуле (5.24);
 3) вычитается значение порога обнаружения UПОn из текущей амплитуды принимаемого ЭК UЦСn.
3) вычитается значение порога обнаружения UПОn из текущей амплитуды принимаемого ЭК UЦСn.
Длительность «скользящего окна» выбирают в несколько раз больше возможной длительности принимаемых ВС от надводных целей, что позволяет таким сигналам пройти рассмотренную процедуру обнаружения сигналов практически без потерь амплитуды, при этом амплитуда протяженных фоновых сигналов (помехи от взволнованной водной поверхности, дождя и суши) уменьшается на величину порога обнаружения.
5.4.3.4. Применение кодов с исправлением ошибок
Рассмотрено в 5.1.3.4.
5.4.3.5 Кодирование технических параметров сигналов
 Этот способ борьбы с помехами базируется на использовании разницы в корреляционных характеристиках сигналов и помех, наглядным примером которого является применение ФКМ сигналов в СРЛС (рис.5.24). При излучении РЧ РС фаза каждого из них через равные интервалы времени несколько раз коммутируется начиная со значения 0º на 180º (на рис.5.24 приведен пример трех коммутаций фазы на 180º). После приема РЧ РС, преобразования в ПЧ РС и прохождения двухстороннего детектора (см.5.3.2) в ПРМ СРЛС последние:
Этот способ борьбы с помехами базируется на использовании разницы в корреляционных характеристиках сигналов и помех, наглядным примером которого является применение ФКМ сигналов в СРЛС (рис.5.24). При излучении РЧ РС фаза каждого из них через равные интервалы времени несколько раз коммутируется начиная со значения 0º на 180º (на рис.5.24 приведен пример трех коммутаций фазы на 180º). После приема РЧ РС, преобразования в ПЧ РС и прохождения двухстороннего детектора (см.5.3.2) в ПРМ СРЛС последние:
1) дешифруются по фазе - обнаруживаются интервалы со значениями фаза 0º и 180º (рис.5.24,а);
2) участки с фазой 180º конвертируются в 0º (рис.5.24,б);
3) все ФКМ участки ПЧ РС (в смеси с помехой) совмещаются во времени и складываются (рис.5.24,в).
В результате синфазного сложения ФКМ участков сигнала его амплитуда заметно возрастает и, в идеале, может увеличиваться во столько раз, сколько ФКМ участков предусмотрено в излучаемом РЧ РС. Помеха же будет складываться несинхронно, т. к. ее фазы на ФКМ участках будут несинхронными между собой из-за случайного характера помехи, поэтому суммарная величина ее амплитуды уменьшится по отношению к суммарной амплитуде сигнала. Таким образом, соотношение С/Ш в смеси С+Ш может существенно возрасти при достаточно большом количестве интервалов ФКМ.
Антенны
5.5.1 Общие сведения об антеннах
Антенна представляет собой устройство преобразования, подводимого к ней РЧ РИ в электромагнитное поле в окружающем пространстве (излучение) или наоборот (прием). Антенны бывают передающие (излучающие), приемные (принимающие) и совмещенныеилиприемо-передающие (одна и та же для излучения и приема). Совмещенная антенна может применяться тогда, когда передатчик и приемник расположены рядом, а также излучаемое и принимаемое ЭК разделены по времени или по частоте.
В конструкции АПРД не требуются элементы, обеспечивающие разгон излучаемого электромагнитного поля до скорости, близкой к скорости света, так как распространение в пространстве с определенной скоростью является собственным свойством этого поля.
В принципе, любые антенны излучают во всех направлениях, но с разной мощностью, что описывают диаграммой направленности антенны (ДНА), представляющей собой график зависимости мощности излучения антенны (РА) от направления (НОА), отсчитываемого от осевой линией антенны. Обычно ДНА изображают в полярной системе отсчета в двух плоскостях: горизонтальной и вертикальной.
Антенны, в зависимости от вида их ДНА, бывают ненаправленные (излучают одинаково во все стороны в заданной плоскости) или направленные.
На практике вместо ДНА часто используют ее частные параметры:
– максимальная мощность излучения (Ри max);
– ширина ДНА в горизонтальной (αг) и вертикальной (αв) плоскостях, представляющие собой угловой размер ДНА в соответствующей плоскости на уровне половинной мощности излучения;
– уровень боковых лепестков ДНА — отношение максимальной мощности боковых лепестков к мощности главного лепестка.
5.5.2. Антенны связные
Связную антенну можно рассматривать как открытый колебательный контур. В обычном контуре электрическая энергия сосредоточена между обкладками конденсатора, магнитная — между витками катушки. Для того чтобы осуществлялось излучение электрического поля наружу, необходимо раздвинуть обкладки конденсатора, при этом для сохранения значения его емкости необходимо увеличивать размеры обкладок. Аналогичным образом создается внешнее магнитное поле путем растягивания катушки индуктивности контура. В результате колебательный контур превращается в два провода.
Таким образом, антенны представляют собой электрическую цепьс распределенными параметрами, в которой индуктивность и емкость распределены вдоль проводника, длина которого должна быть соизмерима с длиной излучаемой или принимаемой радиоволны.
Для создания электромагнитных волн необходимо подать РЧ РИ в разрыв между указанными проводами, которые в антенне называются вибратором. Максимальную энергию вибратор излучает на резонансной частоте, когда длина каждого проводника равна половине длины излучаемой радиоволны. Такую антенну называют полуволновым вибратором. При изменении рабочей частоты ПРД эффективность излучения антенны падает из-за несоответствия резонансной частоте антенны.
 |
Если поместить вибратор в переменное электромагнитное поле, то под влиянием поля в нем возникнут колебания тока и напряжения, т.е. вибратор в этом случае выполняет роль приемной антенны. Максимальное значение тока возникает в середине вибратора, поэтому фидер (провод) для передачи ЭК к приемнику следует включать в разрыв в середине вибратора, такой вибратор называют симметричным (рис. 5.25).
На рис.5.26 приведена диаграмма направленности полуволнового вибратора в плоскости его расположения (рис.5.26,а), и в плоскости, перпендикулярной его оси (рис.5.26,б). В первом случае существуют два максимума излучения / приема в направлении, перпендикулярном оси вибратора, во втором случае вибратор излучает энергию равномерно во всех направлениях. Приведенная на рисунке диаграмма направленности симметричного полувибратора соответствует случаю, когда он расположен в свободном пространстве (от поверхности земли на расстоянии много больше длины волны). Проводящая земная поверхность изменяет характер процессов в антенне и ее ДНА.
Влияние земной поверхности учитывают путем добавления влияния зеркального отображения антенны в ней. Рассмотрим вертикальный проводник длиной L, касающийся одним концом земной поверхности. Резонансная длина волны такого вертикального несимметричного вибратора равна учетверенной длине вибратора (рис.5.27). Такие антенны называют штырями, широко применяемыми на судах. При длине вибратора меньше четверти длины волны для увеличения «электрической» длины антенны к верхнему концу присоединяют отрезок горизонтального провода, что создает дополнительную емкость
(Г-образная или Т-образная антенна).
 При изменении длины волны излучения для настройки антенны в резонанс с ней используют СУ в виде колебательного контура с переменными параметрами. СУ включается на выходе радиопередающего устройства для увеличения передаваемой в антенну мощности.
При изменении длины волны излучения для настройки антенны в резонанс с ней используют СУ в виде колебательного контура с переменными параметрами. СУ включается на выходе радиопередающего устройства для увеличения передаваемой в антенну мощности.
В современных ПРД настройка СУ осуществляется автоматически. Для уменьшения размеров антенн применяют рамочные и магнитные антенны, реагирующие на магнитную составляющую электромагнитного поля. Рамочная антенна представляет собой катушку прямоугольной или круглой формы, витки которой намотаны на жесткую рамку из непроводящего материала, а магнитная антенна — катушку с ферритовым сердечником. ДНА рамочной антенны аналогична диаграмме симметричного вибратора, расположенной вдоль оси рамки. Магнитная антенна имеет ноль ДНА вдоль оси антенны. Эти антенны менее чувствительны, чем, например, Г-образная.
В УКВ-диапазоне для увеличения дальности действия широко используются направленные антенны типа волновой канал, которые имеют ДНА в виде узкого лепестка. Такая ДНА формируется за счет добавления к симметричному вибратору рефлектора сзади вибратора и до восьми директоров перед вибратором (рис.5.28). Подобные антенны применяются в телевидении для приема дециметровых каналов.
5.5.3. СВЧ-антенны
В СРЛС, применяющих дециметровый, сантиметровый и миллиметровый диапазоны волн, используются рупорные и щелевые антенны. В спутниковых системах связи применяют направленные зеркальные антенны (ИНМАРСАТ-А) или ненаправленные антенны (ИНМАРСАТ-В, ИНМАРСАТ-С и др.).
Основными техническими параметрами антенны СРЛС являются:
– габаритные размеры, в частности ее длина (LА);
– скорость вращения (ΩА);
– частота или длина волны излучения (λи);
– период следования ЗФ (Ти);
– толщина ЗФ (LФ), связанная с длительностью излучаемого импульса τисоотношением
Lф = с·τи. (5.25)
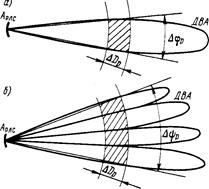
 ДНА СРЛС выглядит как совокупность «лепестков», среди которых выделяют главный лепесток — основной, боковые и задний лепестки — паразитные (рис.5.29).
ДНА СРЛС выглядит как совокупность «лепестков», среди которых выделяют главный лепесток — основной, боковые и задний лепестки — паразитные (рис.5.29).
|
Одной из основных характеристик антенн СРЛС является их поляризация, показывающая направление в пространстве вектора электрического поля излучаемой / принимаемой ими радиоволны. Различают поляризацию линейную и эллиптическую, при этом линейная поляризация обозначается определенной неизменной в пространстве плоскостью, в которой находится указанный вектор, а эллиптической поляризации соответствует вращающийся в вертикальной плоскости, перпендикулярной направлению движения радиоволны, с угловой частотой один оборот за период РЧ вектора электрического поля радиоволны, описывающего в пространстве эллипс.
Дата добавления: 2021-04-21; просмотров: 702;
Поиск по сайту
Узнать еще
- II. Бесполые способы размножения.
- III. Способы формирования фонда капитального ремонта
- А) Способы изображения пространственного строения энантиомеров
- Административно - правовой и гражданско-правовой способы
- АНАЛИТИЧЕСКИЕ ГРАММАТИЧЕСКИЕ СПОСОБЫ
- Анизотропные способы бессеребряной фотографии
- Аргументация и спор (анализ аргументации и способы убеждения, правили и ошибки в аргументации).
- Б.2. Способы подводного бетонирования

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
