ДИСТАНЦИОННОЕ ПРОПОРЦИОНАЛЬНОЕ УПРАВЛЕНИЕ ГИДРОПРИВОДОМ
Гидрораспределители с пропорциональным управлением, применяемые в гидроприводах мобильных машин, создаются в виде гидроагрегата, выполняющего функции распределения рабочей жидкости, регулирования расхода, ограничения максимального давления и разгрузки гидросистемы. Заданный расход жидкости в пропорциональных гидрораспределителях осуществляется изменением положения запорнорегулирующего элемента (золотника), т.е. изменением проходного сечения в гидролинии, соединяющей насос с потребителем. Перемещение золотника достигается за счет создания разности давления в полостях управления.
Оригинальную схему электрогидравлического управления применила фирма "Danfoss" (Дания). Изменение положения золотника гидрораспределителя в этой конструкции осуществляется с помощью электрогидравлических преобразователей, оснащенных релейными электромагнитами. На рис. 61 представлена принципиальная схема управления гидрораспределителем.
Гидравлическая часть схемы управления гидрораспределителем 1 состоит из мостовой схемы, в состав которой входят клапаны 16-19. Для управления этими клапанами служат электромагнитные пилоты 6 и 8, которые включаются электрическим током, поступающим от усилителей 7 и 9. Усилитель 10 служит для включения электромагнитного пилота 11, который управляет открыванием клапана 12. давление управления определяется редукционным клапаном 13 с использованием основной напорной гидролинии насоса 21. Диагональные точки мостовой схемы подключены к полостям управления 2 и 20 золотника гидрораспределителя. Фактическое положение золотника определяется индуктивным датчиком 3 и сравнивается устройством 4 с величиной задающего устройства. Сигнал рассогласования поступает на усилители 7,9,10. При выключенных пилотах клапаны мостовой схемы находятся в открытом состоянии, и золотник гидрораспределителя центрируется пружинами в нейтральной позиции, т.е. давление в полостях управления равно давлению слива. При этом золотник может быть перемещен от рукояти управления, которой дополнительно снабжаются гидрораспределители фирмы " Danfoss ".
Если включен электромагнит 6, то давление управления поступает в полости клапанов 18 и 17, которые, закрываясь, создают давление в полости управления 2 золотника гидрораспределителя 1. Золотник перемещается вправо.
Если включен электромагнит 8, давление управления поступает в полости клапанов 18 и 17, которые, закрываясь, создают давление в полости управления 20 золотника, и он перемещается влево.
Удержание золотника в заданном положении происходит при включении обоих электромагнитов 6 и 8 в момент наименьшего рассогласования.
При большом рассогласовании между величинами сигналов, поступающих от датчика 5 и измерителя фактического положения 3 золотника, включается дополнительно электромагнит 11, открывая клапан 12. Поток управления в этом случае проходит через жиклеры 14 и 15, увеличивая скорость перемещения золотника.
Преимущество рассмотренной схемы управления перед системами: пропорциональными электромагнитами состоит в небольшой мощности тока управления, величина которого составляет 6-8 Вт. а сила тока управления при номинальном напряжении питания 24 В находится на уровне 0,25 МА.

Рассмотренная выше гидравлическая схема управления реализована на некоторых мобильных машинах. На рис.62 представлена схема управления гидроманипулятором лесной машины.
Выходной сигнал, поступающий на распределитель, может быть механическим, гидравлическим или электрическим. Гидрораспределители, которые управляются электрическим сигналом, имеют электрический модуль, в котором электрический входной сигнал необходимой величины преобразуется в гидравлический сигнал, перемещающий основной золотник. Положение золотника при помощи индуктивного датчика (Р) преобразуется в электрический сигнал (действительная величина), который регистрируется в электрическом блоке.
Сигнал рассогласования между требуемым и действительным значениями поступает на усилитель, который приводит в действие три электромагнитных клапана. Клапаны SV1 и SV2 определяют направление, а клапан SVЗ - скорость перемещения основного золотника. Знак величины рассогласования определяет очередность срабатывания электромагнитов SV1 и SV2.
Гидравлический сигнал от электромагнитных клапанов через обратные клапаны управляет потоком рабочей жидкости, перемещающей основной золотник. Когда золотник достигает положения согласие требуемому расходу жидкости, электронный блок регистрирует рассогласование между требуемым и действительным значениями, равными нулю. Клапаны SV1 и SV2 запирают основной золотник в данной позиции до тех пор, пока не изменится снова величина входного сигнала.
Рассмотренный принцип управления устраняет нежелательное влияние трения, гидродинамические силы и загрязнение жидкости. Электронный блок находится в герметичном корпусе, который предохраняет его от вибрации и влажности.
Управление золотником может быть и чисто механическим. Используя механическое управление, можно преодолеть силы, действующие на основной золотник.
Широкое распространение на мобильных машинах получают пульты гидравлического дистанционного управления гидроаппаратурой, которые позволяют управлять перемещением золотников (распределителя. дросселя, регулятора подачи насоса) пропорционально перемещению рукоятки.
Блок гидравлического управления представляет собой гидроусилитель, выполненный в виде регулируемого от рукоятки редукционного клапана, на выходе которого устанавливается давление, пропорциональное углу наклона управляющей рукоятки. Блок управления в основном исполнении может иметь четыре редукционных клапана и обеспечивать дистанционное управление двумя распределительными золотниками.

Рис.63 иллюстрирует конструктивную схему устройства управления (тип THF 6 Mannesmann Rexroth).
Данное устройство включает в себя рукоятку управления (1), четыре редукционных клапана, корпус (6) и электромагнитный замок.
Каждый редукционный клапан (2) состоит из пружины управления (3), возвратной пружины (4) и плунжера (5). В исходном нейтральном положении рукоятка удерживается возвратными пружинами. Когда рукоятка отклоняется, плунжер (5) сжимает пружины 4 и 3. Пружина управления (3) перемещает золотник управления (2) вниз и перекрывает сообщение между соответствующим отверстием и отверстием, соединяющемся с гидробаком. В то же самое время соответствующее отверстие' подключается к напорной гидролинии через канал (8).
Процесс управления начинается, как только золотник управления (2) уравновесится с одной стороны силой пружины (3), а с другой - силой давления жидкости в соответствующем отверстии (1,2,3 или 4). Благодаря взаимодействию между золотником управления {2} и пружиной (3) давление в соответствующем отверстии пропорционально ходу толкающего плунжера (5) и, следовательно, углу наклона рукоятки управления (1).
С целью фиксирования рукоятки управления в наклонном положении в данной конструкции применяется электромагнитный замок. Под толкающим плунжером (5) установлена дополнительная пружина (7). Поэтому, чтобы удерживать эту пружину в сжатом состоянии, требуется большое усилие, особенно в конце хода плунжера (5) и рукоятки управления (1). Это положение достигается при контакте кольца (10) с якорем электромагнита (П). При возбуждении электромагнита рукоятка управления (1) удерживается в ее конечном положении благодаря электромагнитной силе. Замок освобождается автоматически при отключении электромагнита.
На рис. 64 представлен блок дистанционного управления типа 2 ТН5 (Mannesmann Rexroth). Он состоит из рукоятки управления (3), двух редукционных клапанов и корпуса (8).
Каждый редукционный клапан включает золотник управления (4), пружину (5), возвратную пружину (6) и плунжер (7). В нейтральном положении рукоятка управления удерживается двумя возвратными пружинами (6), отверстия 1 и 2 соединяются с гидробаком через просверленный канал (9). Как только рукоятка (3) включена, плунжер (7) выталкивается возвратной пружиной (6) и пружиной управления (5). Пружина (5) перемещает золотник управления (4) вниз. В зависимости от направления и отклонения рукоятки, отверстие Р соединяется с отверстием 1 или 2 через просверленный канал (9) и. таким образом, возрастает давление в том или ином отверстии. Одновременно давление поднимается до уровня управляющего давления, устанавливаемого пружиной (5) и золотником (4). Последний поддерживает давление постоянным.

Благодаря взаимодействию между пружиной (5) и золотником управления (4) давление устанавливается пропорциональным ходу плунжера (7) и, следовательно, положению рукоятки управления (3).
Для работы с электрогидравлическими распределителями выпускаются специальные электронные блоки дистанционного управления (rexroth).
Управляющая рукоятка блока устанавливается шарнирно аналогично блокам гидравлического управления. Центрирующая пружина при отсутствии на рукоятке управляющего усилия удерживает ее в центральном положении. При наклоне рукоятки ее движение передается на два потенциометра, оси которых расположены перпендикулярно одна другой. Выходной сигнал потенциометра поступает в электрический блок. Кинематически устанавливается такая связь между рукояткой и потенциометром, что полный ход рукоятки по диагонали соответствует полному циклу изменения величины управляющего тока.
Рукоятка рассчитана на управление двумя золотниками и, соответственно, она может совершать "крестообразное" движение в двух перпендикулярных плоскостях, причем движение в одной плоскости обеспечивает полное перемещение элемента управления одного потенциометра. Управляющее напряжение с потенциометра поступает на широтно-импульсный модулятор. Модулированный сигнал поступает на соответствующий пропорциональный электромагнит.
Использование принципа усиления сигнала в сочетании с широтно-импульсным модулированием позволяет обеспечить при компактном исполнении электронного блока небольшие потери мощности на управление, снизить влияние изменений сопротивления индуктивных обмоток на качество управления. Значительно компенсировано влияние колебаний бортового напряжения с обеспечением надежного привода золотников распределителей.
Фирмой "Danfoss" разработан ряд блоков электронного управления пропорциональной гидроаппаратурой. Блоки сконструированы на основе потенциометров керамического типа и электронных усилителей. Набор (типа PVRE) включает блоки: с одной центральной рукояткой, управляющей одним потенциометром и одним золотником: с одной центральной рукояткой за счет "крестообразного" движения управляющей двумя потенциометрами; с двумя линейно движущимися рукоятками, управляющими двумя потенциометрами.

Некоторые параметры электронных пультов
фирмы "DanFoss"
Угол отклонения рукоятки, град.
блоки с одной рукояткой .................... 18
блоки с двумя рукоятками ................... 23
Усилие отклонения рукоятки, Н
начальное .................................. 0,4
конечное ................................... 0,55
Масса, кг .......................................... 1,3
Максимальный ток (А) при питании 12 В.............. 0,6
Ток на аналоговом выходе (А) при питании 24 В ...... 1,2
На рис.65 показана схема дистанционного управления с одной центральной рукояткой.
Разработанный фирмой "Mannesmann Rexroth" блок (тип М 10) обеспечивает высокое качество дистанционного пропорционального управления гидрораспределителями мобильных машин.
На рис.66 представлена типичная схема блока с электрогидравлическим управлением.
1 - блок дистанционного управления;
2 - клапан "ИЛИ";
3 - поток управления на выходе из блока;
4 - программируемый электронный модуль;
5 - пропорциональные редукционные клапаны;
6 - распределитель с пилотным управлением;
7 - устройство для пилотного управления;
8.1 - встроенная система потока управления;
8.2 - раздельная система потока управления;
9 - рабочий поток

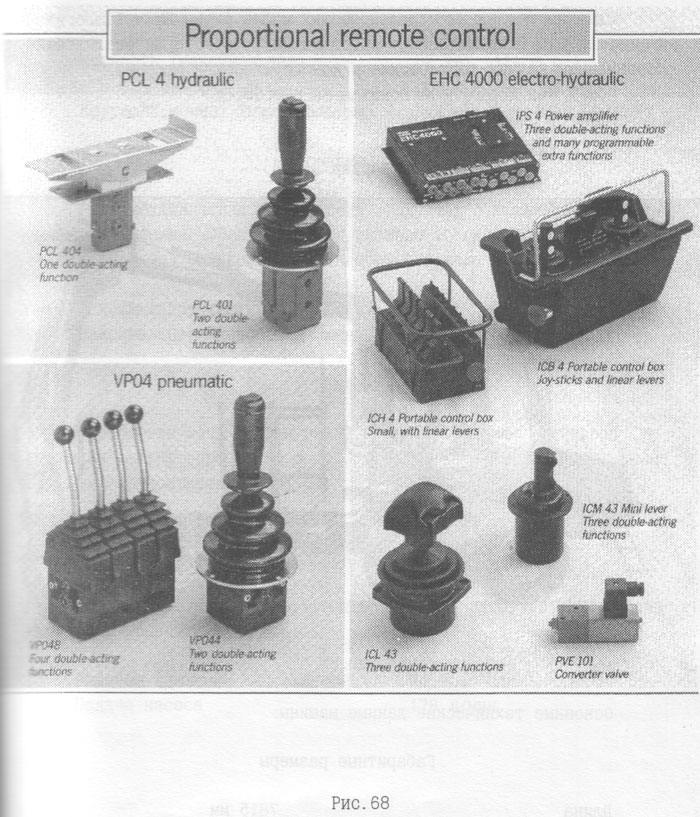
Дистанционное управление находит все более широкое применение в современных мобильных машинах (рис.67). Ведущими мировыми фирмами предлагается целая гамма устройств для дистанционного уловления. На рис.68 показаны некоторые из элементов управления, выпускаемых фирмой "Monsun-Tison".

Дата добавления: 2021-02-19; просмотров: 211;
Поиск по сайту
Узнать еще
- D-триггер с динамическим управлением
- IV. 7. Управление состоянием окружающей среды на локальном уровне
- IX.2. Биотическое управление экосферой и роль деятельности человека
- Аварийное управление мощностью турбин электростанций
- АВАРИЙНОЕ УПРАВЛЕНИЕ ПС ОДНОЙ СЕКЦИИ.
- Автомаическое управление машинами циклического действия
- Автоматические системы с комбинированным управлением
- Автоматическое управление

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
