Гидроприводы с регулируемым насосом
Гидропривод (рис. 5.1) состоит из реверсивного регулируемого насоса Н, соединенного по замкнутой схеме с не регулируемым гидромотором М. Предохранительные клапаны
Рис. 5.1. Принципиальная схема гидропривода с регулируемым насосом
КП1 и КП2 ограничивают максимальное давление в соответствующей напорной гидролинии до значения  . Подпиточный насос НП расположен в корпусе основного насоса, их валы соединены между собой зубчатой передачей и приводятся в движение от одного приводящего двигателя. Давление подпитки, составляющее обычно 0,8—1,1 МПа [10], определяется настройкой клапана давления К, работающего в режиме переливного клапана. Подача рабочей жидкости для восполнения утечек в гидромашинах производится во всасывающую гидролинию через один из обратных клапанов КО, второй клапан закрыт давлением напорной гидролинии. Источником подачи рабочей жидкости служит подпиточный насос НП, давление на выходе из которого
. Подпиточный насос НП расположен в корпусе основного насоса, их валы соединены между собой зубчатой передачей и приводятся в движение от одного приводящего двигателя. Давление подпитки, составляющее обычно 0,8—1,1 МПа [10], определяется настройкой клапана давления К, работающего в режиме переливного клапана. Подача рабочей жидкости для восполнения утечек в гидромашинах производится во всасывающую гидролинию через один из обратных клапанов КО, второй клапан закрыт давлением напорной гидролинии. Источником подачи рабочей жидкости служит подпиточный насос НП, давление на выходе из которого  поддерживается переливным клапаном К. Избыточное давление во всасывающей гидролинии насоса улучшает условия всасывания, [Обеспечивая бескавитационный режим работы насоса и надёжное заполнение жидкостью его рабочих камер. От подпиточного насоса часть рабочей жидкости может отводиться потоком
поддерживается переливным клапаном К. Избыточное давление во всасывающей гидролинии насоса улучшает условия всасывания, [Обеспечивая бескавитационный режим работы насоса и надёжное заполнение жидкостью его рабочих камер. От подпиточного насоса часть рабочей жидкости может отводиться потоком  для питания гидравлических устройств изменения рабочего объема насоса.
для питания гидравлических устройств изменения рабочего объема насоса.
Замкнутый поток рабочей жидкости позволяет осуществить реверс выходного звена гидродвигателя за счет изменения направления подачи насоса без использования направляющих распределителей.
Уравнение равновесия ротора гидромотора имеет следующий вид:
 (5.1)
(5.1)
где  — теоретический момент, развиваемый гидромотором, определяемый давлением напорной гидролинии;
— теоретический момент, развиваемый гидромотором, определяемый давлением напорной гидролинии;  — момент, затрачиваемый на преодоление внешней нагрузки;
— момент, затрачиваемый на преодоление внешней нагрузки;  — момент, затрачиваемый на преодоление механических потерь в гидромоторе;
— момент, затрачиваемый на преодоление механических потерь в гидромоторе;  — момент, затрачиваемый на преодоление подпора в сливной гидролинии.
— момент, затрачиваемый на преодоление подпора в сливной гидролинии.
Подставив в (5.1) выражение для составляющих моментов, получим

откуда связь между давлениями в гидроприводе без учета потерь в гидролиниях будет иметь следующий вид:
 (5.2)
(5.2)
где  — перепад давления, определяемый механическими потерями в гидромоторе;
— перепад давления, определяемый механическими потерями в гидромоторе;  — рабочий объем гидромотора.
— рабочий объем гидромотора.
Из выражения (5.2) видно, что давление в напорной гидролинии определяется внешней нагрузкой на валу гидромотора и пропорционально ей. Зависимость давлений от удельной внешней нагрузки


представлена на рис. 5.2, а.
Наибольший момент от внешней нагрузки, который может преодолеть гидромотор, равен

Теоретическая частота вращения вала гидромотора  , определяется выражением (3.1).
, определяется выражением (3.1).

Рис. 5.2. Статические характеристики гидропривода с регулируемым насосом
Представим рабочий объем насоса  в виде
в виде
 (5.4)
(5.4)
где  параметр регулирования насоса ( = 0—1). Подставив (5.4) в (3.1), получим
параметр регулирования насоса ( = 0—1). Подставив (5.4) в (3.1), получим
 (5.5)
(5.5)
Таким образом, теоретически частота вращения вала гидромотора не зависит от нагрузки. Следовательно, структурное построение гидропривода с машинным управлением дает жесткую нагрузочную характеристику (рис. 5.2, б, кривые 1). При увеличении нагрузки  срабатывает предохранительный клапан, пропуская часть расхода жидкости из напорной гидролинии в сливную. При
срабатывает предохранительный клапан, пропуская часть расхода жидкости из напорной гидролинии в сливную. При  вся подача насоса направляется в сливную гидролинию.
вся подача насоса направляется в сливную гидролинию.
С учетом утечек рабочей жидкости в насосе  и гидромоторе
и гидромоторе  , которые можно считать пропорциональными перепаду давления во внешних гидролиниях [2], частота вращения вала гидромотора
, которые можно считать пропорциональными перепаду давления во внешних гидролиниях [2], частота вращения вала гидромотора  определяется из следующего выражения:
определяется из следующего выражения:
 (5.6)
(5.6)
где  и
и  — коэффициенты объемных потерь в насосе и гидромоторе.
— коэффициенты объемных потерь в насосе и гидромоторе.
Выражение (5.6) может быть представлено также в виде
 (5.7)
(5.7)
где  ;
;  ;
; 
Нагрузочная характеристика гидропривода с учетом утечек представлена на рис. 5.2, б, кривые 2.
Из выражения (5.6) следует, что гидропривод с машинным управлением имеет зону нечувствительности при изменении положения регулирующего органа насоса. Определим нечувствительность гидропривода  , положив в (5.6)
, положив в (5.6)  :
:
 (5.8)
(5.8)
Наибольшее влияние на нечувствительность привода оказывают утечки рабочей жидкости в гидромашинах. Поэтому при увеличении внешней нагрузки на валу гидромотора нечувствительность увеличивается.
Мощность, развиваемая гидромотором  , отличается от потребляемой насосом
, отличается от потребляемой насосом  от приводящего двигателя, на величину, затрачиваемую на привод насоса подпитки
от приводящего двигателя, на величину, затрачиваемую на привод насоса подпитки
или
 (5.9)
(5.9)
где  — подача подпиточного насоса.
— подача подпиточного насоса.
С учетом потерь мощности в гидромашинах выражение (5.9) приобретает вид
 (5.10)
(5.10)
Кривые мощности показаны на рис. 5.2, в. Кривые 1 соответствуют приводу без учета потерь в гидромашинах, кривые 2 — с учетом потерь.
КПД привода с машинным управлением, определяемый самим принципом регулирования скорости, равен единице. Если привод выполнен с замкнутым потоком рабочей жидкости, и, следовательно, в его состав входит насос подпитки, то
 (5.11)
(5.11)
Подставив в (5.11) выражение (5.9), получим
 (5.12)
(5.12)
Зависимость КПД от нагрузки показана на рис. 5.2, г (кривая 1). Учитывая, что мощность, потребляемая подпиточным насосом, обычно не превышает 5% [10] от наибольшей мощности, передаваемой гидроприводом, КПД привода в большом диапазоне изменения нагрузки достаточно высок. С учетом потерь мощности в гидромашинах изменение КПД привода соответствует кривой 2.
Рассмотрим регулировочные характеристики гидропривода с регулируемым насосом, которые представляют собой зависимость выходных параметров гидропривода от параметра регулирования. Для получения качественных зависимостей пренебрежем потерями мощности в приводе.
Зависимость частоты вращения вала гидромотора от параметра регулирования определяется выражением (5.5). Момент, развиваемый гидромотором

есть постоянная величина. Мощность, развиваемая гидромотором, равна
 (5.13)
(5.13)
На рис. 5.3 представлены графические зависимости рассмотренных характеристик. Из них видно, что гидропривод с регулируемым насосом развивает постоянный при заданной нагрузке момент, независимый от частоты вращения вала гидромотора, а развиваемая им мощность пропорциональна частоте вращения.

Рис. 5.3. Регулировочные характеристики гидропривода с регулируемым насосом
Диапазон регулирования скорости в рассматриваемом гидроприводе, выражаемый отношением максимальной частоты вращения вала гидромотора к минимальной,
 (5.14)
(5.14)
теоретически равен бесконечности, так как при  .
.
В действительности гидромотор устойчиво работает лишь начиная с частоты вращения вала  . Это связано с наличием утечек и перетечек жидкости в гидромоторе и «падающей» характеристикой механического трения (рис. 5.4).
. Это связано с наличием утечек и перетечек жидкости в гидромоторе и «падающей» характеристикой механического трения (рис. 5.4).
Так, если при регулировании необходимо уменьшать частоту вращения вала, то при некотором  можно достичь
можно достичь  (кривая 1), но при установлении
(кривая 1), но при установлении  "< ' увеличивается давление, необходимое для преодоления механических потерь в
"< ' увеличивается давление, необходимое для преодоления механических потерь в
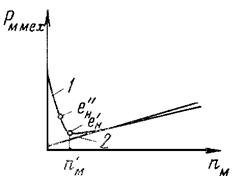
Рис. 5.4. Характеристика механических потерь в гидромоторе
гидромоторе. При этом увеличиваются и утечки жидкости, в результате чего частота вращения вала снижается, что приводит к еще большему увеличению  и так далее пока вал гидромотора не остановится. Таким образом,
и так далее пока вал гидромотора не остановится. Таким образом,  . Для серийно выпускаемых аксиально-поршневых гидромоторов типа Г15—2 [13]
. Для серийно выпускаемых аксиально-поршневых гидромоторов типа Г15—2 [13]  =52,5—90. Пластинчатые гидромоторы имеют более низкий диапазон регулирования.
=52,5—90. Пластинчатые гидромоторы имеют более низкий диапазон регулирования.
Диапазон регулирования может быть увеличен за счет снижения механических потерь при скоростях вращения вала гидромотора близких к нулю. Например, в ролико-лопастных гидромоторах [8] за счет гидростатической разгрузки рабочих органов зависимость потерь от частоты вращения не имеет участка с подающей характеристикой (кривая 1 рис. 5.4), благодаря чему эти гидромоторы могут устойчиво работать с =0,5—1 об/мин.
Гидроприводы с регулируемым насосом нашли наибольшее применение в классе приводов с машинным управлением. Они применяются там, где силовые возможности гидропривода не должны зависеть от скорости движения выходных звеньев. Например, они применяются в гидроприводах станков, колесно-гусеничных машин, поворотных сооружений и т. п.
Дата добавления: 2021-02-19; просмотров: 726;
Поиск по сайту
Узнать еще
- Гидроприводы вращательного движения
- Гидроприводы поворотного движения
- Гидроприводы поступательного движения
- Гидроприводы с замкнутой и разомкнутой системами циркуляции рабочей жидкости
- Гидроприводы с машинно-дроссельным управлением, работающие при переменном давлении
- Гидроприводы с машинно-дроссельным управлением, работающие при постоянном давлении
- Гидроприводы с параллельным расположением дросселя
- Гидроприводы с последовательным расположением дросселя

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
