Емкостные преобразователи
Принцип действия емкостных преобразователей основан на зависимости емкости конденсатора от его геометрических размеров, формы, расстояния между его обкладками и от диэлектрической проницаемости среды. В емкостных преобразователях обычно используются плоскопараллельные или цилиндрические конденсаторы. Питание осуществляется от источника переменного тока.
Емкость плоскопараллельного конденсатора определяется выражением
 (2.24)
(2.24)
где ε0– электрическая постоянная, равная 8,85•10–12 Ф/м; εr – относительная диэлектрическая проницаемость среды; S – площадь обкладок; d – расстояние между обкладками. Каждая из переменных в правой части может являться входной величиной преобразователя.
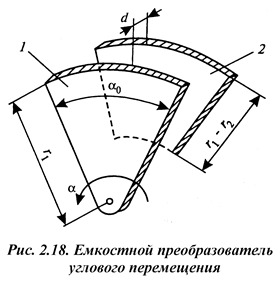 При изменении площади взаимного перекрытия пластин емкость изменяется по линейному закону. Емкостные преобразователи с переменной площадью перекрытия используются как датчики угловых перемещений (рис. 2.18). В этом случае емкость преобразователя равна
При изменении площади взаимного перекрытия пластин емкость изменяется по линейному закону. Емкостные преобразователи с переменной площадью перекрытия используются как датчики угловых перемещений (рис. 2.18). В этом случае емкость преобразователя равна
 (2.25)
(2.25)
где r1 и r2 – наружный и внутренний радиусы обкладок; α0 – начальный угол перекрытия.
Нетрудно показать геометрическим расчетом, что емкость изменяется по линейному закону в зависимости от угла α. Емкостные датчики применяются для измерения сравнительно больших угловых перемещений. Соответствующим выбором формы подвижной 1 и неподвижной 2 обкладок можно получить заданную функциональную зависимость между изменением емкости и угловым перемещением.
С изменением расстояния d между обкладками (рис.) емкость конденсатора изменяется по гиперболическому закону. Емкостные преобразователи с переменным расстоянием между обкладками применяются для измерения малых линейных перемещений (до 1 мм).
Емкостные преобразователи, емкость которых изменяется в зависимости от диэлектрической проницаемости среды, используются на судах как датчики уровня жидкости. Их емкость обычно составляет 10–200 пФ.
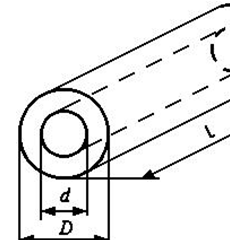 Емкость цилиндрического преобразователя (рис. 2.19)
Емкость цилиндрического преобразователя (рис. 2.19)
 (2.26)
(2.26)
Особенностью датчиков уровня, использующих изменение εr, является зависимость коэффициента преобразования от состава вещества. В таблице приведены значения εr, для некоторых широко применяемых жидкостей.
| Вещество | Вода | Спирт | Ацетон | Мазут | Нефть, трансформаторное масло | Бензин |
| εr | 2,4 | 2,2 | 1,9–2,0 |
На низких частотах (например, 50 Гц) емкостное сопротивление преобразователя достигает нескольких мегаом и становится соизмеримым с сопротивлением изоляции. [Показать простой метод быстрой прикидки порядка цифр: на 50 Гц 1 мкФ дает 3,18 кОм]. Для уменьшения сопротивления емкостные преобразователи питают от высокочастотного источника переменного тока (от единиц килогерц до десятков мегагерц). В состав датчика должен входить преобразователь C→U. В простейшем случае это делитель переменного напряжения и электронный усилитель. Емкость кабельной линии (~ 100 пФ/м) вносит погрешность, поэтому электронный преобразователь C→U располагают как можно ближе к чувствительному элементу и подключают экранированным кабелем для уменьшения влияния помех.
Колебания температуры и влажности окружающей среды также оказывают вредное влияние на работу емкостного преобразователя, приводя к изменениям d и εr.Для уменьшения температурной погрешности обкладки преобразователя выполняют из сплавов с малым температурным коэффициентом линейного расширения.
Емкостные преобразователи имеют малую массу и габариты, обладают высокой чувствительностью. К недостаткам емкостных преобразователей следует отнести необходимость усиления выходного сигнала и защиты от влияния паразитных емкостей, необходимость высокочастотного источника питания.
Емкостные преобразователи практически безынерционны.
Тахогенераторы
Общие сведения. Тахогенераторами называются электрические машины, служащие для преобразования механического перемещения вала в электрический сигнал – выходное напряжение. Закон преобразования механической величины в электрическую определяется статической характеристикой тахогенератора. Уравнение статической характеристики идеального тахогенератора имеет следующий вид:
 (2.27)
(2.27)
где ω – угловая скорость вала; α – угол поворота вала.
По роду тока тахогенераторы подразделяются на тахогенераторы постоянного и переменного тока.
К тахогенераторам предъявляются следующие основные требования:
1) линейность выходной характеристики;
2) большая крутизна выходной характеристики;
3) малая амплитудная погрешность;
4) малая фазовая погрешность (для тахогенераторов переменного тока);
5) минимальная пульсация выходного напряжения (для тахогенераторов постоянного тока);
6) малый момент инерции ротора и малая электромагнитная постоянная времени;
7) стабильность выходной характеристики;
8) малые масса и габариты.
 В судовых системах контроля и регулирования тахогенераторы применяются для измерения частоты вращения гребных валов, главных и вспомогательных силовых двигателей, а также для осуществления обратной связи по частоте вращения и для введения сигнала по производной от угла поворота в автоматических системах регулирования.
В судовых системах контроля и регулирования тахогенераторы применяются для измерения частоты вращения гребных валов, главных и вспомогательных силовых двигателей, а также для осуществления обратной связи по частоте вращения и для введения сигнала по производной от угла поворота в автоматических системах регулирования.
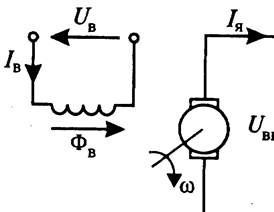
Тахогенераторы постоянного тока (рис. 2.20) представляют собой генераторы постоянного тока небольшой мощности с постоянными магнитами на статоре или с электромагнитным возбуждением от независимого источника постоянного тока. Наиболее распространены тахогенераторы с номинальной частотой вращения n = 1500 ÷ 3000 об/мин.
При постоянном магнитном потоке возбуждения Ф уравнение якорной цепи имеет вид:
 (2.28)
(2.28)
где Uвых – выходное напряжение тахогенератора; E = сеФω – ЭДС тахогенератора; Iя = Uвых/Rн – ток якоря; Rя.ц – сопротивление якорной цепи, равное сумме сопротивлений якоря Rя и перехода щетки – коллектор.
Таким образом,
 (2.29)
(2.29)
откуда
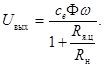 (2.30)
(2.30)
 Видно, что выходное напряжение изменяется по линейному закону в функции частоты вращения ω. Наклон выходной характеристики зависит от сопротивления нагрузки (рис. 2.21, кривая 1 – х.х., 2 и 3 – с нагрузкой). Уменьшение сопротивления нагрузки приводит к уменьшению крутизны выходной характеристики.
Видно, что выходное напряжение изменяется по линейному закону в функции частоты вращения ω. Наклон выходной характеристики зависит от сопротивления нагрузки (рис. 2.21, кривая 1 – х.х., 2 и 3 – с нагрузкой). Уменьшение сопротивления нагрузки приводит к уменьшению крутизны выходной характеристики.
Уравнение получено без учета влияния реакции якоря и величины падения напряжения на переходе щетки – коллектор.
Размагничивающее действие реакции якоря проявляется при возрастании частоты вращения n, так как при этом повышается напряжение U, увеличивается ток Iя тахогенератора, а, следовательно, и МДС якоря. Поэтому при повышенных частотах вращения выходное напряжение U возрастает медленнее, чем увеличивается частота вращения. Статическая характеристика становится нелинейной.
Для графитовых щеток постоянным следует считать не сопротивление перехода щетки – коллектор, а падение напряжения Uщ. Это обусловлено зависимостью сопротивления графита, из которого изготавливают щетки, от плотности тока в нем. Уравнение (2.28) принимает вид:
 (2.31)
(2.31)
При этом в области малых частот вращения тахогенератор становится нечувствительным к изменению ω – появляется зона нечувствительности ωз.н.
Вид статической характеристики с учетом реакции якоря и нелинейности щеточного сопротивления – кривая 4 на рис. 2.21 (утрировано).
Для улучшения линейности статической характеристики целесообразно по возможности увеличивать сопротивление нагрузки, так как при малых токах уменьшается реакция якоря. Хорошую линейность дают тахогенераторы с полым или дисковым якорем, так как у них снижается влияние реакции якоря. Для уменьшения зоны нечувствительности в тахогенераторах устанавливают медно-графитовые или серебряно-графитовые щетки.
В тахогенераторах с обмоткой возбуждения изменение температуры окружающей среды приводит к изменению сопротивления обмотки возбуждения и, следовательно, тока возбуждения. Для уменьшения температурной погрешности магнитную систему тахогенератора делают насыщенной и рабочую точку выбирают за коленом кривой намагничивания. В этом случае изменение тока возбуждения почти не влияет на значение магнитного потока тахогенератора.
Определим характер динамического звена.
В переходном режиме уравнение для цепи якоря тахогенератора (без учета реакции якоря и падения напряжения на переходе щетки – коллектор) имеет вид
 (2.32)
(2.32)
Подставим сюда выражения для е и iя. Введем обозначения:
 – электромагнитная постоянная времени цепи якоря;
– электромагнитная постоянная времени цепи якоря;
 – статический коэффициент передачи тахогенератора.
– статический коэффициент передачи тахогенератора.
С учетом этих обозначений уравнение динамики принимает вид:
 (2.33)
(2.33)
Отсюда видно, что если входной величиной является угловая скорость якоря, то тахогенератор представляет собой апериодическое звено первого порядка с передаточной функцией
 (2.34)
(2.34)
если же входной величиной является угол поворота, то тахогенератор представляет собой реальное дифференцирующее звено:
 (2.35)
(2.35)
Основные преимущества ТГ постоянного тока заключаются в отсутствии фазовых погрешностей и высокой чувствительности. Крутизна выходной характеристики современных ТГ постоянного тока 3–100 мВ/(об/мин) (меньшие значения относятся к тахогенераторам с постоянными магнитами). В зависимости от класса точности тахогенератора скоростная амплитудная погрешность при номинальной частоте вращения составляет ±(0,5–3)%. К недостаткам тахогенератора относятся сложность конструкции, высокая стоимость, низкая надежность, нестабильность выходной характеристики из-за наличия скользящего контакта; пульсации выходного напряжения и радиопомехи, возникающие в результате коммутации тока. Как видим, все недостатки ТГ постоянного тока связаны с наличием щеточного контакта.
Асинхронный тахогенератор.Имеет полый немагнитный ротор и две обмотки на статоре, сдвинутые в пространстве на 90°. Такую же конструкцию имеет двухфазного асинхронного исполнительного двигателя с полым ротором. Одна из обмоток В (возбуждения) постоянно включена в сеть (рис. 2.22), другая обмотка Г (генераторная) присоединена к нагрузке Zн , т. е. является выходной. Полый ротор выполняется из высокоомных материалов (константана, манганина и др.), сопротивление которых мало изменяется под влиянием температуры.
Обмотка возбуждения создает пульсирующий магнитный поток, направленный по продольной оси машины. При неподвижном роторе этот магнитный поток будет наводить трансформаторную ЭДС Етв полом роторе как во вторичной обмотке трансформатора. Полый ротор можно считать состоящим из элементарных проводников, замкнутых накоротко на торцах. Контуры токов, обусловленных трансформаторной ЭДС, располагаются в плоскостях, перпендикулярных продольной 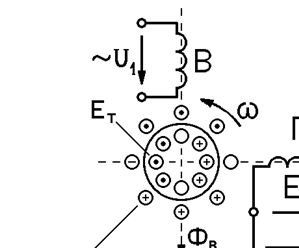 оси машины (на рис. 2.22 условно показаны внутри ротора). Эти токи создают магнитный поток, направленный, согласно правилу Ленца, навстречу магнитному потоку обмотки возбуждения. Теоретически в результате взаимодействия магнитных потоков при неподвижном роторе (ω = 0) в тахогенераторе создается магнитный поток Фв, направленный по продольной оси, поэтому в генераторной обмотке, расположенной по поперечной оси, ЭДС наводиться не будет (Uвых = 0). На самом деле из-за несимметрии магнитной цепи, несимметрии полого ротора, а также неточности сдвига обмоток в пространстве на выходе тахогенератора имеется небольшое напряжение, называемое остаточным.
оси машины (на рис. 2.22 условно показаны внутри ротора). Эти токи создают магнитный поток, направленный, согласно правилу Ленца, навстречу магнитному потоку обмотки возбуждения. Теоретически в результате взаимодействия магнитных потоков при неподвижном роторе (ω = 0) в тахогенераторе создается магнитный поток Фв, направленный по продольной оси, поэтому в генераторной обмотке, расположенной по поперечной оси, ЭДС наводиться не будет (Uвых = 0). На самом деле из-за несимметрии магнитной цепи, несимметрии полого ротора, а также неточности сдвига обмоток в пространстве на выходе тахогенератора имеется небольшое напряжение, называемое остаточным.
При вращении ротора (ω ≠ 0) ввиду его симметрии процесс наведения трансформаторной ЭДС не изменится, и магнитный поток Фв будет по-прежнему существовать. Стало быть, проводники ротора вращаются в поле Фв, и в них наводится ЭДС вращения (на рис. 2.22 условно показана с внешней стороны ротора). Величина ЭДС вращения
Евр = k1ωФв, (2.36)
где k1 – коэффициент, зависящий от конструктивных параметров тахогенератора.
Под действием ЭДС вращения по ротору протекает ток Iвр, контуры которого при большом активном сопротивлении ротора располагаются в плоскостях, параллельных продольной оси. Эти токи создают магнитный поток Фвр, направленный по поперечной оси, т.е. по оси генераторной обмотки.
Так как ток Iвр пропорциональны ЭДС Евр,то и магнитный поток Фвр пропорционален частоте вращения ротора ω:
Фвр = k2 ω. ( 2.37)
Частота пульсации потока Фвр совпадает с частотой напряжения обмотки возбуждения ωв. Магнитный поток Фвр наводит в генераторной обмотке выходную ЭДС Евых, действующее значение которой определяется уравнением
Евых = 4,44 fwг.эфФвр.m, (2.38)
где wг.эф – эффективное число витков генераторной обмотки; Фвр.m – амплитудное значение потока по поперечной оси.
Так как Фвр пропорционально ω, то и Евых пропорционально ω. Частота выходной ЭДС равна частоте напряжения возбуждения и не зависит от частоты вращения ротора.
Приведенные рассуждения справедливы при независимости потока Фв от частоты вращения ротора. В действительности магнитный поток Фв с ростом частоты вращения уменьшается. Это объясняется размагничивающим действием токов ротора. Если замкнуть обмотку Г на нагрузочное сопротивление Zн, то по ней потечет ток Iг. Поток Фвр будет создаваться геометрической суммой МДС ротора и обмотки статора Г, что скажется на амплитуде ЭДС Евых. Кроме того, само выходное напряжение Uвых будет меньше чем Евых так как представляет собой геометрическую разность ЭДС Евых и падения напряжения на собственном сопротивлении обмотки Zг:
Úвых = Éг – ÍгZг. (2.39)
Статические характеристики асинхронного ТГ приведены на рис. 2.23. Частота вращения ротора представлена в относительных единицах: ν = ω/ωв.
Типичные параметры АТГ:
- полная погрешность при максимальной рабочей скорости 0,1–2,5%;
- крутизна выходной характеристики 1–10 мВ/(об/мин);
- величина остаточной ЭДС 25–100 мВ.
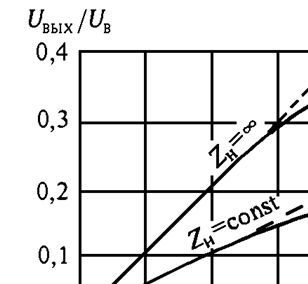 Для уменьшения скоростных погрешностей выбирают тахогенераторы с такой синхронной частотой вращения, при которой значение относительной частоты вращения ротора не превышает 0,3, так как выходная характеристика на участке ν = 0 – 0,3 практически линейна.
Для уменьшения скоростных погрешностей выбирают тахогенераторы с такой синхронной частотой вращения, при которой значение относительной частоты вращения ротора не превышает 0,3, так как выходная характеристика на участке ν = 0 – 0,3 практически линейна.
Уравнение динамики без учета нагрузки имеет вид:
 (2.40)
(2.40)
Если за входную величину принята частота вращения ротора, тахогенератор представляет собой безынерционное звено с передаточной функцией W(p) = k. Если же за входную величину принят угол поворота ротора, то тахогенератор представляет собой идеальное дифференцирующее звено с передаточной функцией W(p) = kр.
Асинхронный тахогенератор используется, например, в авторулевом в качестве дифференцирующего звена, входной величиной которого является угол отклонения судна от заданного курса.
Дата добавления: 2021-02-19; просмотров: 1154;
Поиск по сайту
Узнать еще
- Cпециализированные преобразователи
- DC-AC преобразователи. Двухактный инвертор.
- Абсолютные и дифференциальные вихретоковые преобразователи
- АКТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ СОПРОТИВЛЕНИЯ
- Аналого цифровые преобразователи
- Аналого-цифровые и цифро-аналоговые преобразователи
- Аналого-цифровые и цифро-аналоговые преобразователи
- Аналого-цифровые преобразователи

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
