Радиолокационные принципы измерения расстояния
Важнейшим условием эффективности ближней радиолокации является формирование остронаправленного электромагнитного излучения энергии [6]. В диапазоне сверхвысоких частот эта задача решается применением рупорных, параболических, линзовых или стержневых антенн. Наиболее часто используются рупорные антенны, которые являются волноводами с расширением на открытом, излучая энергию конце, присоединяясь другим концом к отверстию прямоугольного волноводного тракта внутри сенсорного блока. Конструкция такого рупора позволяет формировать в его апертуре (выходном отверстии) плоскую электромагнитную волну. Причем, чем больше размер апертуры, тем более узкий пучок энергии можно сфокусировать, многократно увеличив коэффициент усиления антенны.
Важнейшей количественной характеристикой, определяющей способность концентрировать энергию в заданном направлении, является ширина диаграммы направленности антенны, то есть пространственный угол, при отклонении на который интенсивность излучения падает вдвое [6].
В качестве зондирующих сигналов в ближней радиолокации используются радиоволны сверхвысокочастотного (СВЧ) диапазона 10 ... 50 ГГц, излучаемых непрерывно. Соответствующая длина радиоволны (6 ... 30 мм) значительно больше размеров пылевых частиц, что обеспечивает минимальные рассеяния и затухания излучения в запыленных газовых средах, присущих металлургическим агрегатам. Кроме того, такая длина волны позволяет проводить измерения рельефа поверхности материалов с достаточной точностью [6].
Распространение электромагнитных волн в пространстве происходит с постоянной скоростью с = 3×108 м/с. Таким образом, время прохождения радиосигналов от источника до объекта, который находится на расстоянии Н и обратно равняется
 , (1)
, (1)
Однако, применение электромагнитных колебаний постоянной частоты для радиолокации позволяет судить лишь о наличии объекта, но не о расстоянии до него. Это связано с тем, что интенсивность отраженного сигнала зависит не только от расстояния до объекта, но также от размеров, характера и свойств отражающей поверхности.
Измерить величину расстояния радиоволны до объекта можно, если предоставить отличительные признаки каждой из последовательно излучаемых системой электромагнитных колебаний и, благодаря этому, получить возможность распознавать отраженные сигналы при возвращении их в приемное устройство через ту же антенну, которая их испускает [2].
Модулируя электромагнитные колебания по частоте, т.е. меняя ее по линейному закону, можно добиться того, что каждое последующее колебание будет отличаться от предыдущего небольшим увеличением частоты. Благодаря этому можно определить не только наличие объекта, но и расстояние до него.
Рассмотрим процесс определения расстояния до объекта при облучении его частотно-модулированными микроволнами. На рис. 1а представлены законы изменения частоты излучений и отраженной радиоволн.
Если частотно-модулированные колебания имеют частоту f(t), которая, начиная с величины f0, растет с постоянной скоростью на величину девиации частоты Fд, а затем возвращается к значению f0, то в течение периода модуляции tм каждый отдельный период колебаний, генерируемых может быть отличный от всех других подобных периодов.
 |
Рис. 1. Закон изменения частоты излученного (сплошная линия)
и отраженного (штриховая линия) сигналов (а);
сигнал биений на выходе смесителя (б)
В момент времени t0 = 0 период колебаний радиоволны, соответствующий частоте f0, излучается в направлении удаленного объекта, достигает его и отражается назад, вступая в приемное устройство системы через промежуток времени, который определяется только расстоянием H между антенной радиолокатора и объектом. Этот период колебаний возвращается в приемник через интервал времени, когда происходит излучение нового периода колебаний, соответствующего частоте f0 + f1. Гетеродинный сигнал, который является копией излучаемого в данный момент радиосигнала частоты f1, также поступает в приемное устройство, где он смешивается с принятым сигналом частоты f0. На выходе смесителя образуется разностный сигнал с частотой огибающей биений (рис. 1, б)
В момент времени t0 = 0 период колебаний радиоволны, соответствующий частоте f0, излучается в направлении удаленного объекта, достигает его и отражается назад, вступая в приемное устройство системы через промежуток времени, который определяется только расстоянием H между антенной радиолокатора и объектом. Этот период колебаний возвращается в приемник через интервал времени, когда происходит излучение нового периода колебаний, соответствующего частоте f0 + f1. Гетеродинный сигнал, который является копией излучаемого в данный момент радиосигнала частоты f1, также поступает в приемное устройство, где он смешивается с принятым сигналом частоты f0.
На выходе смесителя образуется разностный сигнал с частотой огибающей биений (рис. 1, б)
 (2)
(2)
В результате, измеряя частоту Fб, можно определить величину и, следовательно, расстояние H.
Если частота отраженного сигнала - это первый информативный параметр при зондировании поверхности материалов, то амплитуда колебаний (или мощность этого сигнала) является вторым информативным параметром, который, с одной стороны, обратно пропорционален расстоянию до поверхности, а с другой - зависит от ее рельефа и электрофизических характеристик.
2 Конструкция и техническая характеристика радиоуровнемера РДУ-Х2
На стенде для радиолокационных исследований, созданном на кафедре автоматизации производственных процессов НМетАУ, использованный радиодальномер-уровнемер РДУ-Х2 производства ГНПО "Исток" (г.Фрязино, Россия). РДУ-Х2 выполнен в моноблочном исполнении (рис. 2) с выносным блоком питания.
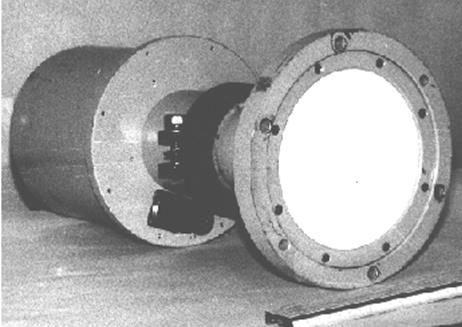 Основным силовым элементом РДУ-Х2 является рупорная антенна. На антенне устанавливается приемо-передающий СВЧ модуль (ППМ) и основание для крепления печатной платы с микропроцессором. На основу одевается цилиндрический колпак. На срезе (апертуре) антенны устанавливается фторопластовая линза, которая служит для защиты СВЧ аппаратуры от попадания пыли и влаги. Сферическая форма внешней поверхности линзы обеспечивает дополнительное фокусировки радиолуча. Для установки РДУ-Х2 на объекте служит крепежный фланец.
Основным силовым элементом РДУ-Х2 является рупорная антенна. На антенне устанавливается приемо-передающий СВЧ модуль (ППМ) и основание для крепления печатной платы с микропроцессором. На основу одевается цилиндрический колпак. На срезе (апертуре) антенны устанавливается фторопластовая линза, которая служит для защиты СВЧ аппаратуры от попадания пыли и влаги. Сферическая форма внешней поверхности линзы обеспечивает дополнительное фокусировки радиолуча. Для установки РДУ-Х2 на объекте служит крепежный фланец.
Рис. 2. Радиодальномер-уровнемер РДУ-Х2
Техническая характеристика РДУ-Х2:
диапазон измеряемых расстояний 1 ... 10 м
зона нечувствительности до 1 м
максимальная погрешность измерений ± 0,1 м
диапазон частоты излучения 35 ... 37,5 ГГц
ширина диаграммы направленности антенны 6 градусов
выходные сигналы: цифровой RS-485
постоянного тока 0 ... 5, 0 ... 20, 4 ... 20 мА
напряжение питания +24 В
потребляемая мощность не более 30 Вт
масса не более 3 кг
Степень защиты РДУ-Х2 соответствует ИP56 согласно ГОСТ 14256-80.
Допустимое давление окружающей среды до 0,1 МПа. Климатическое исполнение - У-1 (умеренный климат, эксплуатация на открытом воздухе) по ГОСТ 15150-69.
Мощность СВЧ-излучения не превышает 20 мВт. При этом уровень плотности потока излучения, согласно данным Государственной санитарно-эпидемиологической экспертизы от 07.11.2003 г. № 45771, не превышает 2,5 мкВт/см2, определяющий безопасность использования РДУ-Х2 для персонала. Однако, при работе с РДУ-Х2 не рекомендуется длительное пребывание персонала на расстоянии менее 1 м от антенны.
Структурная схема РДУ-Х2 изображена на рис. 3. РДУ состоит из приемопередающего СВЧ модуля (ППМ), схемы усиления и фильтрации, схемы цифровой обработки сигнала. Встроенный блок питания 19 формирует рабочее напряжение +5 В и +18 В. Питание аналоговых 5 ВА и цифровых 5 ВЦ устройств производится от раздельных стабилизаторов напряжения.
СВЧ генератор 3 работает в диапазоне частот 35 ... 37,5 ГГц. Перестройку генератора по частоте в пределах ± 500 МГц осуществляет варакторы 4. СВЧ колебания, сформированные генератором 3, поступающие в антенну 1 и излучаются в направлении локационного объекта. Отраженный сигнал принимается антенной 1 и поступает на смеситель 2. На смесителе сигнал, принятый антенной, смешиваются с сигналом, излучаемым генератором в данный момент. В результате на выходе смесителя получается разностный сигнал биений (см. рис. 1, б), который несет информацию о расстоянии до цели.
ППМ-модуль установлен внутри термостата. В состав термостата входят нагреватель 5 и температурный датчик 6. Работой прибора управляет микропроцессор 17, который выполняет следующие функции:
- Регулирование напряжения питания СВЧ генератора 3 путем изменения коэффициента передачи усилителя 8;
- С помощью цифро-аналогового преобразователя (ЦАП) 14 и усилителя 9 формируется пылевидная напряжение перестройки, подаваемого на варакторы 4;
- Руководит работой аналого-цифрового преобразователя (АЦП) 15. На АЦП поступают сигнал со смесителя 2, предварительно усиленный в 7, отфильтрованный полосовым фильтром 10 и окончательно отрегулирован
Рис. 3. Структурная схема радиолокационного дальномера-уровнемера РДУ-Х2
автоматическим регулятором уровня (АРР) 13, а также сигнал от температурного датчика 5;
- Управляет коэффициентом передачи АРР 13 в зависимости от амплитуды принимаемого сигнала;
- Измеряет температуру приемно-передающего модуля и управляет работой его термостата через реле 20;
- Вычисляет дальность до объекта по результатам обработки спектра сигнала, осуществляет селекцию помех и выдает результат на ЦАП 14;
- По каналу RS-485 РДУ Связь с внешним компьютером. Приемник 18 преобразует цифровые выходные сигналы для передачи на большие расстояния.
Цифро-аналоговый преобразователь 14 выдает напряжение, пропорциональное дальности до измеряемого объекта. Это напряжение преобразуется в узле 12 в постоянный ток для выдачи на вторичный регистрирующий прибор. Выходной токовый сигнал может настраиваться на унифицированные диапазоны 0 ... 5 мА, 0 ... 20 мА, 4 ... 20 мА.
С помощью восьмиразрядного датчика кода 16 задается индивидуальный номер РДУ-Х2 и выбираются различные варианты рабочей программы из библиотеки программ, хранящейся в памяти процессора, например, устанавливается рабочий диапазон измеряемых расстояний (от 5 до 15 м), вводится поправка к рабочей характеристике , настраивается чувствительность прибора (от 10 до 20 дБ), регулируется постоянная времени изменения его показаний (от 0 до 60 с), а также устанавливается нижний предел температуры ППМ (от 20 до 50 ºС).
3 Применение РДУ для измерения параметров технологических
Наиболее простым и очевидным применением радиоуровнемеров является измерение уровня сыпучих материалов в бункерах. Коллектив научно-исследовательской лаборатории "Микроволновая техника для металлургии" кафедры автоматизации производственных процессов НМетАУ разработал методы успешного применения радиолокаторов ближнего действия с учетом специфических особенностей этих металлургических объектов.
В рабочем положении РДУ устанавливается над контролирующей веществом в верхней части технологической емкости (бункере, вагранке, ковши, конвертере, доменной печи и т.п.). В случае, если емкость открыта, РДУ устанавливается на специальных приспособлениях (консолях, подвесах) над контролирующей поверхностью, как показано на рис. 4а.
Высота установки РДУ в этом случае ограничивается только его максимальным рабочим диапазоном. РДУ может устанавливаться на проем или без всякого крепления, или на врезанный патрубок с помощью болтового соединения. Высота патрубка, штуцера, на котором крепится РДУ, не должна превышать 0,5 м. Расстояние между антенным фланцем и верхним контролируемой чертой уровня вещества в емкости не должна быть меньше 1 м. Это расстояние является зоной нечувствительности датчика, называемой «мертвой» зоны (рис. 4, а).
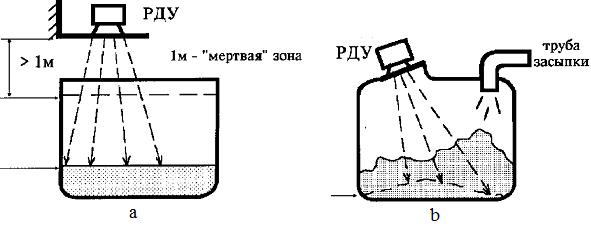
Рис. 4. Установка РДУ на технологических емкостях
При выборе места установки РДУ на емкости, необходимо обеспечить максимальное расстояние его от устройств которые подают материал (Рис. 4, б), с тем, чтобы поток материала не пересекал радиолуч РДУ. При этом необходимо обеспечить такое размещение РДУ, чтобы радиолуч при минимальном уровне вещества в емкости не попадал на ее стенки. Диаметр D радиолуча РДУ-Х2 рассчитывается по формулах D = 0,15 R. Так, на расстоянии R = 5 м от РДУ ширина луча будет 0,75 м, а при R = 10 м ширина луча D = 1,5 м.
Для более эффективной работы датчика по поверхностям со сложным рельефом (например, при образовании воронок или конусов материала) допускается устанавливать РДУ с небольшим (5 ... 10 градусов) наклоном к вертикали (рис.4, б).
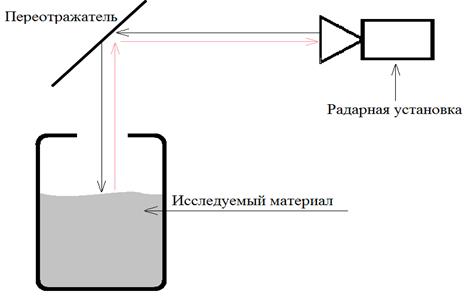 |
2. Размещение радиолокаторов на технологических емкостях обычно проводится в довольно ограниченных условиях. Поэтому, кроме очевидного
Рис. 5. Измерение расстояния до поверхности материала
с использованием отражателя
метода крепления радара в верхней части агрегата, разработаны технические решения [6], основанные на повороте оси радиолуча с помощью отражателей или угловых волноводов (рис. 5). В этом случае для прицеливания радара используют угловой отражатель, установленный в заданном месте над емкостью.
3. Основная погрешность определения расстояния связана с уклонами поверхности материала. Мощность радиоволны, отражается ближней к антенне зоной эллипсообразной площадки (рис. 6), превышает мощность радиоволны, отражается дальней зоной. Поэтому при определении расстояния возникает систематическая ошибка «в минус».
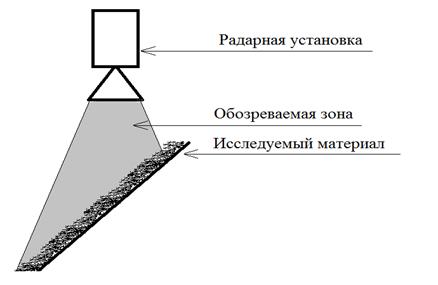
Рис. 6. Измерение расстояния до наклонной поверхности материала
4. Уклон поверхности материала образуется за счет присущих ему углов естественного откоса. При этом, как показали эксперименты, мощность отраженного сигнала зависит не только от расстояния до облучаемой поверхности, но и от угла встречи радиолуча с поверхностью. На практике это может привести к значительному ослаблению отраженного сигнала при больших уклонах зондирующей поверхности. Для определения расстояния в таких случаях созданы специальные алгоритмы обработки радиолокационных данных [6].
5. Требования к точности определения расстояния до поверхности материала ограничены, естественно, максимальным его кусков (рис. 7). По законам радиофизики, погрешность измерения расстояния при частотно-модулируемой излучении радара не превышает длины его волны. Поэтому для обычных в металлургии материалов с размером кусков в диапазоне 5 ... 80 мм и длине волны излучения 8 мм такая точность обеспечивается простой электронной схемой вторичного (низкочастотного) блока радиолокатора РДУ [6]. Следует учитывать, что при этом в зоне радиолуча естественные колебания рельефа поверхности усредняются.
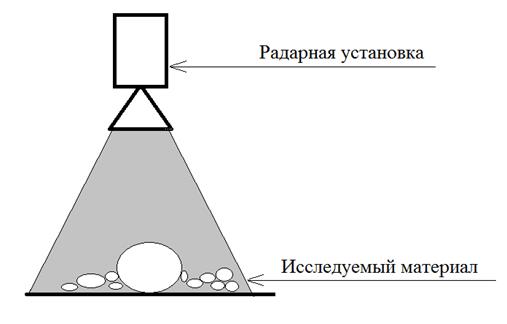
Рис. 7. Измерение расстояния до материала разного размера
6. Радиолокатор может не только определять расстояние, но и распознавать вид материала в зависимости от его электрофизических свойств. Так, при проведении экспериментов с использованием кокса размером 5 ... 80 мм, агломерата фракцией 5 ... 40 мм и окатышей диаметром 5 ... 15 мм была обнаружена возможность различения вида материалов [6].
7. Большие исследования проведены с целью определения возможности микроволнового контроля грануляционного состава кусковых и сыпучих материалов при их движении на конвейере [6]. Эта задача, важная для совершенствования и автоматизации технологических режимов горнодобывающих, обогатительных производств, доменного процесса, до сих пор не имеет удовлетворительного решения. Отдаленным аналогом этой научной проблемы является дистанционное радиолокационное зондирование рельефа земной поверхности. Однако, существенной разницей задачи контроля грансостава от моделей отражения радиоволн является соизмеримость размеров гранул материала с расстоянием от них до антенны, диктуемая конструктивной необходимостью размещения антенны в непосредственной близости от контролируемого потока материала.
8. Радары применяют также для измерения уровня металлургических расплавов (металла, шлака) на кислородном конвертере, который характеризуется интенсивными пылевыделениями и газовыделениями, высокой температурой, ограниченными возможностями размещения аппаратуры, а также для измерения уровня жидкого металла в чугуновозном ковше, миксере, вакууматоре и др. [6].
9. Условия эксплуатации радаров в металлургическом производстве во многих случаях связаны с наличием негативных техногенных воздействий (высоких температур и давлений, мощных пылевых и газовых потоков, вибраций, ударов и т.п.) Так, температура на колошнике доменной печи или на крышке вакууматора может превышать 100 °С, а в верхней части конвертера-еще выше. Это требует применения специальных устройств для тепловой защиты РДУ [6].
Запыленность среды в бункерах может быть весьма значительной (до 250г/м3). Хотя затухания отраженного сигнала при этом не превышает 3 дБ, реальную опасность представляет опыления поверхности антенны. Поэтому необходимо применять защитные пластины с радиопрозрачного теплостойкого материала. Кроме того, следует организовать или аэродинамический отдува пыли по радиоканалу с одновременным обдувом поверхности защитной пластины, или аэростатических наддув полости между антенной РДУ и защитной пластиной [6]. При этом желательно использовать для обдува осушенный сжатый газ, поскольку частицы водяного пара могут конденсироваться на защитной пластине в виде пленки, что создаст препятствия для радиоизлучения.
Дата добавления: 2021-02-19; просмотров: 723;
Поиск по сайту
Узнать еще
- II. Виды ионизирующих излучений и единицы измерения ИИ
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
