Радіолокаційні принципи вимірювання відстані
Однією з умов ефективності ближньої радіолокації є формування гостронаправленного електромагнітного випромінювання енергії [6]. У діапазоні надвисоких частот це завдання вирішується застосуванням рупорних, параболічних, лінзових або стрижневих антен. Найбільш часто використовуються рупорні антени, які є хвилеводами з розширенням на відкритому, випромінюючому енергію кінці, приєднуючись іншим кінцем до отвору прямокутного хвилеводного тракту всередині сенсорного блоку. Конструкція такого рупора дозволяє формувати в його апертурі (вихідному отворі) плоску електромагнітну хвилю. Причому, чим більше розмір апертури, тим більше вузький пучок енергії можна сфокусувати, багаторазово збільшивши коефіцієнт посилення антени.
Найважливішою кількісної характеристикою, що визначає здатність концентрувати енергію в заданому напрямку, є ширина діаграми спрямованості антени, тобто просторовий кут, при відхиленні на який інтенсивність випромінювання падає вдвічі [6].
У якості зондувальних сигналів у ближній радіолокації використовуються радіохвилі надвисокочастотного (НВЧ) діапазону 10 ... 50 ГГц, що випромінюються безперервно. Відповідна довжина радіохвилі (6 ... 30 мм) значно більше розмірів пилових частинок, що забезпечує мінімальні розсіювання і затухання випромінювання в запилених газових середовищах, властивих металургійним агрегатів. З іншого боку, така довжина хвилі дозволяє проводити вимірювання рельєфу поверхні матеріалів з достатньою точністю [6].
Поширення електромагнітних хвиль у просторі відбувається з постійною швидкістю с = 3×108 м/с. Таким чином, час проходження радіохвилі від джерела до об'єкта, який знаходиться на відстані Н і назад рівняється
 , (1)
, (1)
Однак, застосування електромагнітних коливань постійної частоти для радіолокації дозволяє судити лише про наявність об'єкта, але не про відстань до нього. Це пов'язано з тим, що інтенсивність відбитого сигналу залежить не тільки від відстані до об'єкта, але також від розмірів, характеру і властивостей поверхні, що відбиває.
Виміряти величину відстані радіохвилі до об'єкта можна, якщо надати відмінні ознаки кожному з послідовно випромінюваних системою електромагнітних коливань і, завдяки цьому, отримати можливість розпізнавати відбиті сигнали при поверненні їх в приймальний пристрій через ту ж антену, яка їх випромінює [2].
Модулюючи електромагнітні коливання по частоті, тобто змінюючи її по лінійному закону, можна домогтися того, що кожне наступне коливання буде відрізнятися від попереднього невеликим збільшенням частоти. Завдяки цьому можна визначити не тільки наявність об'єкта, а й відстань до нього.
Розглянемо процес визначення відстані до об'єкта при опроміненні його частотно-модульованими мікрохвилями. На рис. 1а представлені закони зміни частоти випроміненої і відбитої радіохвиль.
Якщо частотно-модульовані коливання мають частоту f (t), яка, починаючи з величини f0, зростає з постійною швидкістю на величину девіації частоти Fд, а потім повертається до значення f0, то протягом періоду модуляції tм кожен окремий період коливань, що генеруються може бути відмінний від усіх інших подібних періодів.
У момент часу t0 = 0 період коливань радіохвилі, відповідний частоті f0, випромінюється у напрямку віддаленого об'єкта, досягає його і відбивається назад, вступаючи в приймальний пристрій системи через проміжок часу, який визначається тільки відстанню H між антеною радіолокатора і об'єктом. Цей період коливань повертається в приймач через інтервал часу, коли відбувається випромінювання нового періоду коливань, відповідного частоті f0 + f1. Гетеродинний сигнал, який є копією випромінюваного в даний момент радіосигналу частоти f1, також надходить в приймальний пристрій, де він змішується з прийнятим сигналом частоти f0. На виході змішувача утворюється різницевий сигнал з частотою обвідної биття (рис. 1, б)
У момент часу t0 = 0 період коливань радіохвилі, відповідний частоті f0, випромінюється у напрямку віддаленого об'єкта, досягає його і відбивається назад, вступаючи в приймальний пристрій системи через проміжок часу, який визначається тільки відстанню H між антеною радіолокатора і об'єктом. Цей період коливань повертається в приймач через інтервал часу, коли відбувається випромінювання нового періоду коливань, відповідного частоті f0 + f1. Гетеродинний сигнал, який є копією випромінюваного в даний момент радіосигналу частоти f1, також надходить в приймальний пристрій, де він змішується з прийнятим сигналом частоти f0.
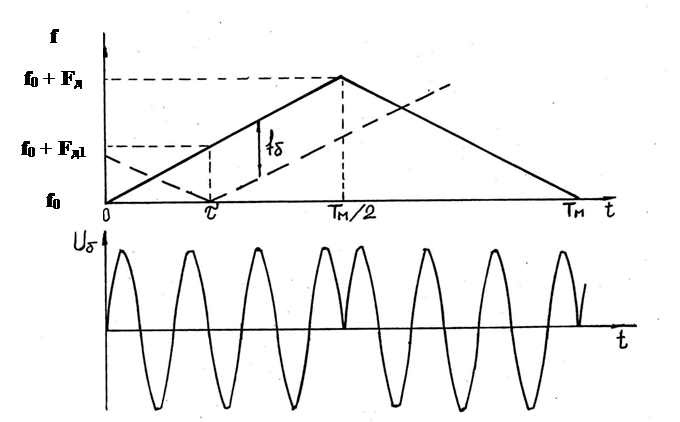
Рис. 1. Закон зміни частоти випроміненого (суцільна лінія
і відбитого (штрихова лінія) сигналів (а);
сигнал биття на виході змішувача (б)
На виході змішувача утворюється різницевий сигнал з частотою обвідної биття (рис. 1, б)
 (3)
(3)
В результаті, вимірюючи частоту Fб, можна визначити величину і, отже, відстань H.
Якщо частота відбитого сигналу - це перший інформативний параметр при зондуванні поверхні матеріалів, то амплітуда коливань (або потужність цього сигналу) є другим інформативним параметром, який, з одного боку, обернено пропорційний відстані до поверхні, а з іншого - залежить від її рельєфу і електро – фізичних характеристик.
Конструкція та технічна характеристика радіорівнеміра РДУ-Х2
На стенді для радіолокаційних досліджень, створеному на кафедрі автоматизації виробничих процесів НМетАУ, використаний радіодальномір-рівнемір РДУ-Х2 виробництва ДНВО "Істок" (г.Фрязіно, Росія). РДУ-Х2 виконаний в моноблочному виконанні (рис. 2) з виносним блоком живлення.
Основним силовим елементом РДУ-Х2 є рупорна антена. На антені встановлюється приймально-передавальний СВЧ модуль (ППМ) і підстава для кріплення друкованої плати з мікропроцесором. На основу одягається циліндричний ковпак. На зрізі (апертурі) антени встановлюється фторопластова лінза, що служить для захисту СВЧ апаратури від попадання пилу і вологи. Сферична форма зовнішньої поверхні лінзи забезпечує додаткове фокусування радіопроменя. Для установки РДУ-Х2 на об'єкті служить кріпильний фланець.
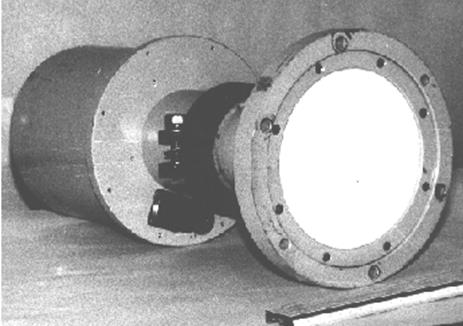
Рис. 2. Радіодальномір-рівнемір РДУ-Х2
Технічна характеристика РДУ-Х2:
діапазон вимірюваних відстаней 1 ... 10 м
зона нечутливості до 1 м
максимальна похибка вимірювань ± 0,1 м
діапазон частоти випромінювання 35 ... 37,5 ГГц
ширина діаграми спрямованості антени 6 градусів
вихідні сигнали: цифровий RS-485
постійного струму 0 ... 5, 0 ... 20, 4 ... 20 мА
напруга живлення +24 В
споживана потужність не більше 30 Вт
маса не більше 3 кг
Ступінь захисту РДУ-Х2 відповідає ІP56 згідно ГОСТ 14256-80.
Допустимий тиск навколишнього середовища до 0,1 МПа. Кліматичне виконання - У-1 (помірний клімат, експлуатація на відкритому повітрі) по ГОСТ 15150-69.
Потужність НВЧ-випромінювання не перевищує 20 мВт. При цьому рівень щільності потоку випромінювання, згідно з даними Державної санітарно-епідеміологічної експертизи від 07.11.2003 р. № 45771, не перевищує 2,5 мкВт/см2, що визначає безпеку використання РДУ-Х2 для персоналу. Однак, при роботі з РДУ-Х2 не рекомендується тривале перебування персоналу на відстані менше 1 м від антени.
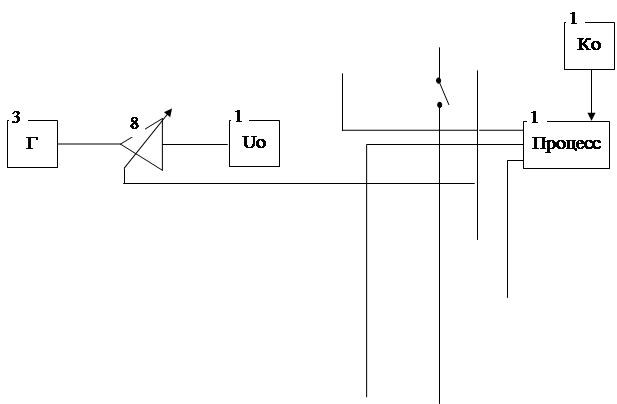
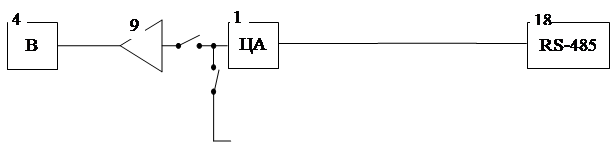
Структурна схема РДУ-Х2 зображена на рис. 3. РДУ складається з прийомопередающого СВЧ модуля (ППМ), схеми посилення і фільтрації, схеми цифрової обробки сигналу. Вбудований блок живлення 19 формує робочу напругу +5 В і +18 В. Живлення аналогових 5 ВА і цифрових 5 ВЦ пристроїв проводиться від роздільних стабілізаторів напруги.
СВЧ генератор 3 працює в діапазоні частот 35 ... 37,5 ГГц. Перебудову генератора по частоті в межах ± 500 МГц здійснює варактор 4. СВЧ коливання, сформовані генератором 3, надходять в антену 1 і випромінюються в напрямку локаційного об'єкта. Відбитий сигнал приймається антеною 1 і поступає на змішувач 2. На змішувачі сигнал, прийнятий антеною, змішуються з сигналом, випромінюваним генератором в даний момент. У результаті на виході змішувача виходить різницевий сигнал биття (див. рис. 1, б), який несе інформацію про відстань до цілі.
ППМ-модуль встановлений всередині термостата. До складу термостата входять нагрівач 5 і температурний датчик 6. Роботою приладу керує мікропроцесор 17, який виконує такі функції:
- Регулює напруга живлення СВЧ генератора 3 шляхом зміни коефіцієнта передачі підсилювача 8;
- За допомогою цифро-аналогового перетворювача (ЦАП) 14 і підсилювача 9 формується пилоподібна напруга перебудови, що подається на варактори 4;
- Керує роботою аналого-цифрового перетворювача (АЦП) 15. На АЦП надходять сигнал зі змішувача 2, попередньо посилений в 7, відфільтрований смуговим фільтром 10 і остаточно відрегульований





|







| |
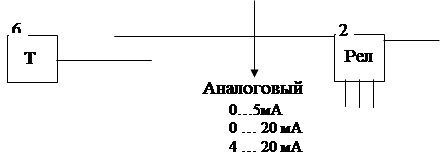 |
Рис. 3. Структурна схема радіолокаційного далекоміра-рівнеміра РДУ-Х2
автоматичним регулятором рівня (АРР) 13, а також сигнал від температурного датчика 5;
- Управляє коефіцієнтом передачі АРР 13 в залежності від амплітуди прийнятого сигналу;
- Вимірює температуру приймально-передавального модуля і управляє роботою його термостата через реле 20;
- Обчислює дальність до об'єкта за результатами обробки спектра сигналу, здійснює селекцію перешкод і видає результат на ЦАП 14;
- По каналу RS-485 РДУ обмінюється даними з зовнішнім комп'ютером. Приймач 18 перетворює цифрові вихідні сигнали для передачі на великі відстані.
Цифро-аналоговий перетворювач 14 видає напруга, пропорційна дальності до вимірюваного об'єкта. Це напруга перетвориться у вузлі 12 в постійний струм для видачі на вторинний реєструючий прилад. Вихідний струмовий сигнал може налаштовуватися на уніфіковані діапазони 0 ... 5 мА, 0 ... 20 мА, 4 ... 20 мА.
За допомогою восьмирозрядного датчика коду 16 задається індивідуальний номер РДУ-Х2 і вибираються різні варіанти робочої програми з бібліотеки програм, що зберігається в пам'яті процесора, наприклад, встановлюється робочий діапазон вимірюваних відстаней (від 5 до 15 м), вводиться поправка до робочої характеристиці, настроюється чутливість приладу (від 10 до 20 дБ), регулюється постійна часу зміни його показань (від 0 до 60 с), а також встановлюється нижня межа температури ППМ (від 20 до 50 º С).
Застосування РДУ для вимірювання параметрів технологічних
Найбільш простим і очевидним застосуванням радіоуровнемеров є вимірювання рівня сипучих матеріалів в бункерах. Колектив науково-дослідної лабораторії "Мікрохвильова техніка для металургії" кафедри автоматизації виробничих процесів НМетАУ розробив методи успішного застосування радіолокаторів ближньої дії з урахуванням специфічних особливостей цих металургійних об'єктів.
У робочому положенні РДУ встановлюється над контролюючою речовиною у верхній частині технологічної ємності (бункері, вагранці, ковші, конвертері, доменної печі тощо). У випадку, якщо ємність відкрита, РДУ встановлюється на спеціальних пристосуваннях (консолях, підвісах) над контролюючою поверхнею, як показано на Рис. 4а.
Висота установки РДУ в цьому випадку обмежується тільки його максимальним робочим діапазоном. РДУ може встановлюватися на отвір або без всякого кріплення, або на врізаний патрубок за допомогою болтового з'єднання. Висота патрубка, штуцера, на якому кріпиться РДУ, не повинна перевищувати 0,5м. Відстань між антенним фланцем і верхньою контрольованою межею рівня речовини в ємності не повинна бути менше 1 м. Ця відстань є зоною нечутливості датчика, званої «мертвою» зоною ( рис. 4, а).
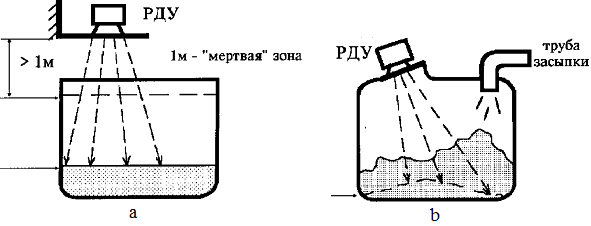
Рис. 4. Установка РДУ на технологічних ємностях
При виборі місця установки РДУ на ємності, необхідно забезпечити максимальне відстань його від пристроїв які подають матеріал (Рис. 4, б), з тим, щоб потік матеріалу не перетинав pадіолуч РДУ. При цьому необхідно забезпечити таке розміщення РДУ, щоб pадіолуч при мінімальному рівні речовини в ємності не потрапляв на її стінки. Діаметр D pадіолуча РДУ-Х2 розраховується по фоpмулах D = 0,15 R. Так, на відстані R = 5 м від РДУ ширина променя буде 0,75 м, а при R = 10 м ширина променя D = 1,5 м.
Для більш ефективної роботи датчика по поверхнях зі складним рельєфом (наприклад, при утворенні воронок або конусів матеріалу) допускається встановлювати РДУ з невеликим (5 ... 10 градусів) нахилом до вертикалі (рис.4,б).
2. Розміщення радіолокаторів на технологічних ємностях зазвичай проводиться в досить обмежених умовах. Тому, крім очевидного методу кріплення радара у верхній частині агрегату, розроблені технічні рішення [6], засновані на повороті осі радіопроменя за допомогою відбивачів або кутових хвилеводів (рис. 5). У цьому випадку для прицілювання радара використовують кутовий відбивач, встановлений в заданому місці над ємністю.
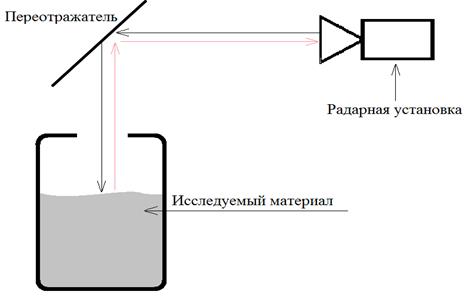
Рис. 5. Вимірювання відстані до поверхні матеріалу
з використанням відбивача
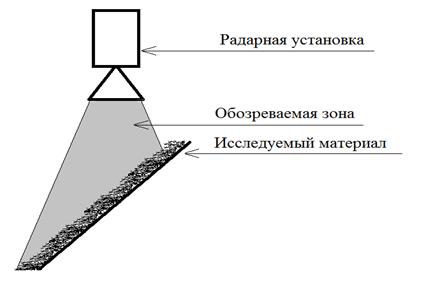 3. Основна похибка визначення відстані пов'язана з ухилами поверхні матеріалу. Потужність радіохвилі, що відображається ближньої до антени зоною еліпсоподібної майданчика (рис. 6), перевищує потужність радіохвилі, що відображається дальньої зоною. Тому при визначенні відстані виникає систематична помилка «в мінус».
3. Основна похибка визначення відстані пов'язана з ухилами поверхні матеріалу. Потужність радіохвилі, що відображається ближньої до антени зоною еліпсоподібної майданчика (рис. 6), перевищує потужність радіохвилі, що відображається дальньої зоною. Тому при визначенні відстані виникає систематична помилка «в мінус».
Рис. 6. Вимірювання відстані до похилої поверхні матеріалу
4. Ухил поверхні матеріалу утворюється за рахунок властивих йому кутів природного укосу. При цьому, як показали експерименти, потужність відбитого сигналу залежить не тільки від відстані до опромінюваної поверхні, але і від кута зустрічі радіопроменя з поверхнею. На практиці це може призвести до значного ослаблення відбитого сигналу при великих ухилах зондуючої поверхні. Для визначення відстані в таких випадках створені спеціальні алгоритми обробки радіолокаційних даних [6].
5. Вимоги до точності визначення відстані до поверхні матеріалу обмежені, природно, максимальним розміром його шматків (рис. 7). За законами радіофізики, похибка вимірювання відстані при частотно-модульованому випромінюванні радара не перевищує довжини його хвилі. Тому для звичайних у металургії матеріалів з розміром шматків у діапазоні 5 ... 80 мм і довжині хвилі випромінювання 8 мм така точність забезпечується простий електронною схемою вторинного (низькочастотного) блоку радіолокатора РДУ [6]. Слід враховувати, що при цьому в зоні радіопроменя природні коливання рельєфу поверхні усереднюються.
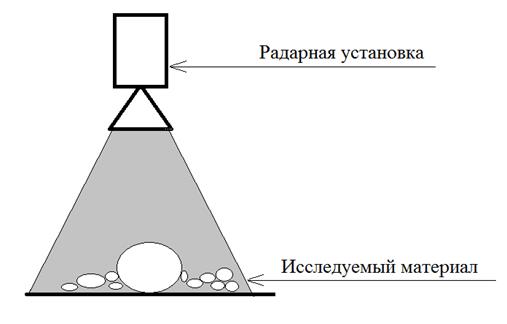
Рис. 7. Вимірювання відстані до матеріалу різного розміру
6. Радіолокатор може не тільки визначати відстань, але і розпізнавати вид матеріалу залежно від його електрофізичних властивостей. Так, при проведенні експериментів з використанням коксу розміром 5 ... 80 мм, агломерату фракцією 5 ... 40 мм і окатишів діаметром 5 ... 15 мм було виявлено можливість розрізнення виду матеріалів [6].
7. Великі дослідження проведено з метою визначення можливості мікрохвильового контролю грануляційного складу кускових і сипучих матеріалів при їх русі на конвеєрі [6]. Це завдання, важлива для вдосконалення і автоматизації технологічних режимів гірничодобувних, збагачувальних виробництв, доменного процесу, до цих пір не має задовільного рішення. Віддаленим аналогом цієї наукової проблеми є дистанційне радіолокаційне зондування рельєфу земної поверхні. Однак, суттєвою різницею завдання контролю грансостава від моделей відображення радіохвиль є сумірність розмірів гранул матеріалу з відстанню від них до антени, що диктується конструктивної необхідністю розміщення антени в безпосередній близькості від контрольованого потоку матеріалу.
8. Радари застосовують також для вимірювання рівня металургійних розплавів (металу, шлаку) на кисневому конвертері, який характеризується інтенсивним пило-та газовиділеннями, високою температурою, обмеженими можливостями розміщення апаратури, а також для вимірювання рівня рідкого металу в чавуновозних ковшах, міксерах, вакууматорах і ін. [6].
9. Умови експлуатації радарів в металургійному виробництві у багатьох випадках пов'язані з наявністю негативних техногенних впливів (високих температур і тисків, потужних пилових і газових потоків, вібрацій, ударів і т.п.) Так, температура на колошнику доменної печі або на кришці вакууматора може перевищувати 100 ° С, а у верхній частині конвертера-ще вище. Це вимагає застосування спеціальних пристроїв для теплового захисту РДУ [6].
Запиленість середовища в бункерах може бути досить значною (до 250г/м3). Хоча загасання відбитого сигналу при цьому не перевищує 3 дБ, реальну небезпеку становить запилення поверхні антени. Тому необхідно застосовувати захисні пластини з радіопрозорого теплостійкого матеріалу. Крім того, слід організувати або аеродинамічний віддув пилу з радіоканалу з одночасним обдувом поверхні захисної пластини, або аеростатичних наддув порожнині між антеною РДУ і захисною пластиною [6]. При цьому бажано використовувати для обдування осушений стиснений газ, оскільки частинки водяної пари можуть конденсуватися на захисній пластині у вигляді плівки, що створить перешкоди для радіовипромінювання.
Дата добавления: 2021-02-19; просмотров: 544;
Поиск по сайту
Узнать еще
- Антикорупційні принципи
- Антропогенні екосистеми. Екосистема сучасного міста. Вплив урбанізації на природу. Архітектурно-містобудівні аспекти будівельної екології.Основні принципи урбоекології
- Будова і принципи дії машин для отримання однорідних мас
- Будова і принципи дії машин для отримання чистих фракцій
- Будова і принципи дії помадозбивальних машин
- Визначення відстаней, недоступних для вимірювання мірною стрічкою.
- Вимірювання горизонтальних кутів.
- Вимірювання невідомоїЕРС компенсаційним методом. Дільники напруги

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
