КЛАССИФИКАЦИЯ СРЕДСТВ АВТОМАТИКИ И ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ И ВЗАИМОДЕЙСТВИе ИХ С ОБЪЕКТОМ УПРАВЛЕНИЯ
В общем случае управления производственным объектом, технологическим процессом предполагаются известными закон управления, входные сигналы, параметры, выходные сигналы, характеризующие состояние объекта управления (ОУ). Анализируя выходные и входные сигналы, система управления (СУ) вырабатывает управляющие сигналы согласно принятому закону управления. Взаимодействие СУ с ОУ представлено в общем виде на рис. 1.
Вектор входных сигналов X = (х1, х2, ..., хn) в общем случае воздействует на ОУ и входы СУ. Вектор выходных сигналов Y = (у1, у2, ..., ут) характеризует состояние объекта (процесса) и также поступает на входы СУ.Вектор возмущающих воздействий F = (f1, f2,…, fk) стремится нарушить заданное функционирование ОУ. Обладая информацией о входных X и выходных Y сигналах, зная закон управления (цель управления), СУ вырабатывает вектор управляющих воздействий U = (u1, u2,..., ир) так, чтобы была достигнута цель управления. Принципиальное отличие сигналов F от сигналов X в том, что сигналы F не поступают на вход СУ. Впрочем, любое возмущающее воздействие может быть переведено в ранг входных. Для этой цели должен быть установлен соответствующий преобразователь физической величины fi в физическую величину, воспринимаемую на входах СУ. Чем меньше остается сигналов F, тем совершеннее СУ и тем более высокого качества может быть достигнут результат управления. Знание текущего значения сигнала ft (фактически уже xt) позволяет выработать упреждающие компенсирующие воздействия U. Этим, например, объясняется более высокое качество переходных процессов в так называемых системах с компаундированием по возмущению.
Рассмотренное взаимодействие хорошо прослеживается на примере простой системы программного управления скоростью двигателя. Здесь входное воздействие – требуемое значение скорости, выходной сигнал – истинное значение скорости, возмущающее воздействие — момент на валу двигателя. Управляющее воздействие в СУ формируется как разность требуемого и истинного значений скорости.
Установка преобразователя момента (например, измерением тока якоря двигателя) дает возможность перевести момент на валу двигателя в ранг входных воздействий и по соответствующему закону вырабатывать компенсирующее воздействие, не допуская значительных изменений скорости. Далеко не всегда закон изменения управляющего воздействия U столь прост, как в рассмотренном примере, и в сложных системах его реализации может потребовать полной загрузки одной или нескольких ЭВМ.
Двухсторонняя связь по вектору U характерна для наиболее совершенных СУ. В этом случае СУ не ограничивает своих функций лишь выработкой управляющих воздействий. U, а осуществляет, кроме того, контроль их исполнения в ОУ.
Пользуясь рис. 1, рассмотрим основные отличия системы автоматического управления (САУ) от автоматизированной системы управления (АСУ). В САУ все функции управления возложены на СУ без участия человека-оператора. В АСУ управление осуществляется совместными действиями СУ и оператора. Вектор двусторонних воздействий O = (o1, o2, ..., оr) поставляет оператору информацию о ходе технологического процесса (связь к оператору) и обеспечивает воздействие через СУ на ОУ по воле оператора (связь от оператора к СУ). Первое знакомство с термином САУ и АСУ создает представление о завершенности автоматизации в САУ и, как следствие, представление об их большой сложности. Безусловно, могут быть и САУ, и АСУ различной сложности, но в целом более сложными следует считать АСУ. Такое утверждение становится ясным после анализа основных причин существования и АСУ наряду с САУ. Первая причина существования АСУ – высокая сложность и неполная изученность процесса управления. Это не позволяет полностью передать СУ функции управления и делает необходимым присутствие человека с его опытом и интуицией в тракте управления.
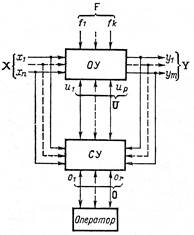
Рис. 1. Взаимодействие системы управления с объектом управления
Вторая причина существования АСУ – экономические соображения, связанные с неполной подготовленностью ОУ к автоматическому управлению им. Введение новых органов управления может оказаться экономически неоправданным, например при редком включении или отключении водяного охлаждения (здесь достаточно обычных ручных вентилей), при смене инструмента, смене заготовки и пр. Вне зависимости от причин ориентации на АСУ требуется создание и включение в состав системы устройств связи с оператором. Эти дополнительные устройства должны обеспечить двухстороннюю связь по вектору О с учетом особенностей, вызванных присутствием в системе человека-оператора.
Вне зависимости от вида системы (САУ и АСУ) она может трактоваться как совокупность устройств (приборов), подчиненных общей цели управления.
Возможны различные определения и классификация устройств. В соответствии с их функциональным назначением различают следующие функциональные группы устройств:
1. Устройства получения контрольной информации. Эту группу составляют измерительные преобразователи электрических и неэлектрических величин.
2. Устройства передачи контрольной информации. Сюда относятся устройства преобразования вида и уровня сигналов, модуляторы, демодуляторы, шифраторы, дешифраторы, линии связи и т.д.
3. Устройства преобразования информации и выработки управляющих (командных) сигналов. Это наиболее сложная группа устройств хранения информации, арифметико-логических преобразований. Именно в этой группе наиболее перспективно применение программируемых средств вычислительной техники вплоть до управляющих вычислительных машин или системы из нескольких ЭВМ.
4. Устройства передачи командной информации. В них много общего со второй функциональной группой, но здесь более актуальны энергетические проблемы.
5. Устройства исполнения командной информации. К этой группе следует отнести различные двигатели, электромагниты, муфты, контакторы и т.д.
В соответствии с выделенными функциональными группами устройств взаимодействие СУ и ОУ согласно рис. 1 может быть уточнено (рис. 2). Номер группы устройств на рис. 2 соответствует пяти выделенным группам.
Устройство может быть определено как совокупность элементов, выполняющая одну общую задачу функционального преобразования.
Под элементом следует понимать конструктивно целостную совокупность деталей, выполняющую одну операцию преобразования.
Следует обратить внимание на условность разделения средств автоматики, вычислительной техники на элементы, устройства, системы. Бурное развитие интегральной технологии непрерывно изменяет границы приведенной классификации.
Систему управления называют простой, если она оперирует с одним физическим параметром (или с малым числом таковых). Выделяют следующие виды простых систем:
1. Информационно-измерительные системы. Основная задача их – измерение и поставка информации человеку, в ЭВМ, на регистрацию. Сложность таких систем растет при необходимости получения более сложных характеристик, зависящих от измеряемых параметров, как, например, в системах автоматического циклического контроля, прогнозирующих состояние комплекса-аппаратуры.
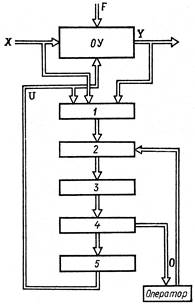
Рис. 2. Система управления как совокупность устройств
пяти функциональных групп
2. Телеизмерительные системы. Отличаются от систем первого вида осуществлением передачи информации на значительное расстояние, как, например, в системе измерения частоты в различных узлах энергетической сети.
3. Системы передачи информации (например, телеграфной).
4. Системы преобразования информации (например, система определения характеристик исследуемой случайной величины).
5. Системы управления (например, ручного управления температурой в печи).
6. Системы программного управления (например, система шаблон – копир – деталь).
7. Системы телеуправления (то же, что в п. 5, но с передачей информации на значительное расстояние).
8. Системы регулирования. К этому типу систем относят те, в которых по требуемому и истинному значению параметра вырабатывается управляющее воздействие на объект управления, т.е. системы замкнутой структуры, например система регулирования частоты генератора или позиционная следящая система с преобразователями на сельсинах.
9. Системы телерегулирования (то же, что в п. 8, но с передачей информации на значительное расстояние).
Часто затруднительным оказывается провести четкую границу между различными видами систем. В этих случаях систему относят к тому или иному виду в зависимости от основной задачи, решаемой согласно техническому заданию.
Управление большинством производственных объектов сводится к организации сложных систем. К основным признакам сложных систем следует отнести большое число параметров, многоконтурность, сложность алгоритма управления, большие затраты оборудования, высокую стоимость. Сложные системы могут быть организованы по одноуровневой или многоуровневой структуре. Два противоположных вида одноуровневых структур – это централизованная и децентрализованная.
Для правильного выбора структуры проектируемой системы следует хорошо представить основные достоинства и недостатки обоих видов одноуровневых структур. Упомянутые структуры представлены на рис. 3, а (централизованная) и рис. 3, б (децентрализованная). Предполагается, что обе структуры рис. 3 должны обеспечить управление k объектами ОУ1 ¸ ОУk или в общей задаче управления могут быть выделены k частных задач З1 ¸ 3k.
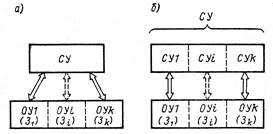
Рис. 3. Одноуровневые структуры систем управления:
а – централизованная; б – децентрализованная
В случае централизованной структуры система управления одна. Ее быстродействия должно быть достаточно для того, чтобы с заданной производительностью справиться с управлением всеми объектами (задачами). В этом случае неизбежно разделение общего ресурса времени СУ между объектами (задачами).
В случае децентрализованной системы СУ состоит из k систем управления СУ1 ¸ СУk в соответствии с числом объектов (задач) управления. Каждая из систем СУi выполняет свою задачу. Все k систем работают параллельно.
Централизованная система обладает по сравнению с децентрализованной низкой стоимостью, так как оборудование СУ используется для всех объектов (задач) управления. Децентрализованная система при том же быстродействии элементов обеспечивает по сравнению с централизованной большую производительность, так как все автономные системы работают параллельно. Обе структуры следует рассматривать как крайние из возможных модификаций одноуровневых структур при их проектировании с направленностью к снижению стоимости за счет уменьшения производительности или к повышению производительности за счет увеличения стоимости.
Проектирование СУ производственными объектами ведется при заданной производительности. Таким образом, централизовать структуру следует, пока выполняются требования по производительности. Возможны различные варианты централизации. Наиболее интересен тот, который при заданной производительности обеспечивает минимум стоимости.
Однозначное сопоставление централизованной и децентрализованной структур по надежности затруднительно. Из того, что централизованная система содержит принципиально меньший объем оборудования, следует большее время наработки на отказ. С другой стороны, отказ в централизованной структуре приводит к аварии всей системы. Децентрализованная структура может быть организована таким образом, чтобы отказ приводил к выводу из строя лишь одной СУi. При этом вся СУ (пусть не оптимально) может продолжать выполнять общую задачу управления.
В качестве упрощенного примера может быть приведена децентрализованная структура системы автоматического регулирования (стабилизации) двух параметров генератора: переменного напряжения и частоты. Выход из строя одной системы стабилизации еще не приводит к выходу из строя всей системы.
С точки зрения ремонтопригодности лучшей следует считать децентрализованную структуру ввиду ее разделенности и большей простоты каждой из СУi по сравнению с общей СУ централизованной структуры.
Опыт проектирования и эксплуатации сложных систем позволяет сделать вывод, что для большего числа систем более выгодной оказывается многоуровневая структурная организация. На рис. 4 представлен вариант широко распространенной двухуровневой системы управления. В такой системе хорошо сочетаются достоинства централизованной и децентрализованной структур. Непосредственно у объекта управления расположены терминальные системы управления ТСУ1 ¸ TCУk. Они образуют I (нижний) уровень управления. Систему следует организовать таким образом, чтобы автоматическое или автоматизированное управление каждым из 0Уi было возможным от одной соответствующей ТСУi. Наиболее сложные задачи, связанные с оптимальным управлением всей системы, возлагаются на центральную систему управления (ЦСУ), образующую Я (верхний) уровень управления.
Именно здесь требуется наиболее сложное оборудование, и его централизация дает наибольший эффект. Если вся система имеет большие размеры, то между I и II уровнями находятся линии связи. Роль ЦСУ чаще всего выполняет ЭВМ или управляющая вычислительная машина (УВМ). ТСУi также часто выполняют на базе программируемых средств управляющей вычислительной техники типа мини-, микро-УВМ или так называемых программируемых терминальных контроллеров. При проектировании ТСУ особое взимание обращают на помехоустойчивость и тяжелые условия эксплуатации, связанные с необходимостью размещения ТСУ непосредственно у производственного объекта, а не в специальных помещениях лабораторного типа.
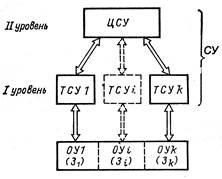
Рис. 4. Двухуровневая система управления
Основной поток информации для структуры на рис. 4 замыкается между 0Уi и ТСУi. Все процессы непосредственного управления происходят здесь. Ввиду этого разгружаются линии связи между ЦСУ и ТСУi и тем самым повышается помехоустойчивость всей системы. Обмен информацией между ЦСУ и ТСУ (последние удалены друг от друга и поэтому наиболее подвержены воздействию помех при обмене) производится вне рабочей фазы изготовления продукта, ввиду чего возникновение сбоя не приводит к аварии или браку продукта. Обмен между ЦСУ и ТСУ контролируется и при возникновении сбоя повторяется. К исполнению в ТСУ принимается лишь правильно переданная и принятая информация.
Системы I уровня ТСУ1 ¸ ТСУk в общем случае снабжены буферными запоминающими устройствами (БЗУ). Наличие БЗУ в каждой из ТСУ обеспечивает автономность ее работы. Чем больше объем БЗУ, тем более длительный промежуток времени ТСУ будет функционировать автономно. Отказ в ЦСУ, где сосредоточено наиболее сложное оборудование, приводит лишь к тому, что вся СУ распадается на k автономных независимых систем управления. Отказ в ТСУi приводит к выходу из строя лишь одной из k систем.
Более того, в этой аварийной ситуации функции управления отказавшей терминальной системой управления может взять на себя ЦСУ. Это произойдет либо за счет ухудшения качества обслуживания оставшихся систем центральной системой управления, либо за счет введения в действие общего скользящего резерва СУ, расположенного в ЦСУ.
Дополнительное достоинство рассматриваемой на рис. 1–4 структуры состоит в возможности постепенного ввода в эксплуатацию сложной системы. Локальная автоматизация на нижнем уровне вводится постепенно для каждого из ОУ. При этом созданная ТСУi сразу же запускается в эксплуатацию, начиная приносить материальный и моральный эффект. Одновременно (или даже после этого) создается ЦСУ, требующая больших сроков и затрат.
Дата добавления: 2021-01-26; просмотров: 601;
Поиск по сайту
Узнать еще
- API как средство интеграции приложений.
- B. Департаменты и управления функционального характера.
- II Классификация САSЕ-средств
- II. Затраты (времени, физических сил, финансовых средств и т.д.)
- II. Классификация документов
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- III. Классификация методов воспитания.
- III. Механизмы, средства и методы психологического воздействия.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
