Случай 1. Две точки принадлежат одному звену
Пусть имеется звено, на котором расположены точки А и В. Абсолютную скорость точки Впредставим как геометрическую сумму скоростей переносного (скорости полюса  ) и относительного (скорости вращения точек вокруг полюса А-
) и относительного (скорости вращения точек вокруг полюса А-  ) движений.
) движений.
| Рис 2.9. Скорости точек жесткого звена. |
|
 и модуль этого вектора определяется по формуле
и модуль этого вектора определяется по формуле  , где ω - угловая скорость звена. Направление ω можно определить по направлению
, где ω - угловая скорость звена. Направление ω можно определить по направлению  и наоборот. Например, когда известно направление
и наоборот. Например, когда известно направление  , то следует мысленно перенести вектор в точку В и посмотреть, куда стремиться переместиться точка В вокруг точки А.
, то следует мысленно перенести вектор в точку В и посмотреть, куда стремиться переместиться точка В вокруг точки А.
Изображение скоростей в виде пучка векторов, при котором абсолютные скорости точек звеньев выходят из одной точки, а относительные скорости соединяют концы лучей, называют планомскоростей.
Поскольку переносное движение выбрано поступательным, то ускорение точки В можно представить в виде геометрической суммы двух ускорений  .
.
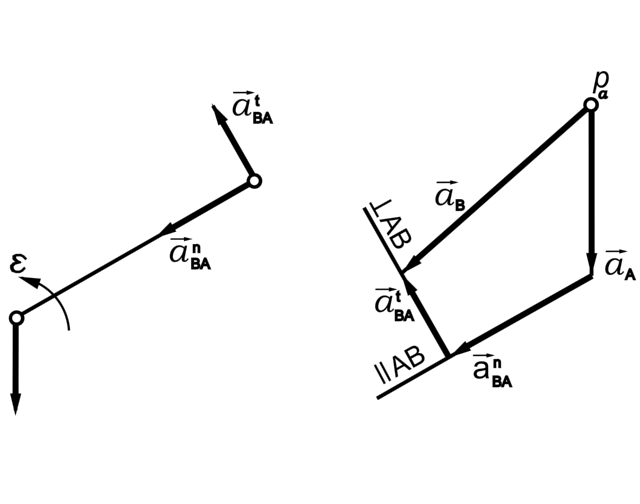 Ускорение
Ускорение  разложим на два: нормальное
разложим на два: нормальное  направленное от точки В к точке А, и тангенциальное, направленное перпендикулярно линии АВ.
направленное от точки В к точке А, и тангенциальное, направленное перпендикулярно линии АВ.
Окончательно получаем следующее векторное уравнение для отыскания ускорения точки В:
| Рис 2.10. Ускорение точек жесткого звена. |
 .
.
Величина ускорения  и
и  определим по формулам:
определим по формулам:
 и
и  ,
,
где ε - угловое ускорение звена. Направление ε можно определить по направлению, а τВА и наоборот.
Случай 2. Теоремы подобия для планов скоростей и ускорения
2.1. Дано. 1. Линейные размеры звена CDE.
| б) |
| a) |
 и
и  скорости точек C и D.
скорости точек C и D.
| б |
| а |
| б) |
| а) |
Требуется определить  .
.
Скорость  связана со скоростями
связана со скоростями  и
и  уравнениями:
уравнениями:
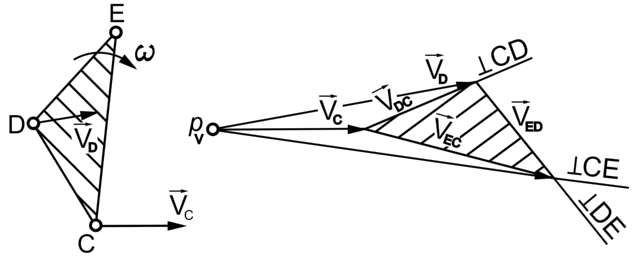
| Рис 2.11. Определение скоростей точек одного звена. |
Строим план скоростей. Треугольник CDE подобен треугольнику cde
 , поскольку
, поскольку  и
и  .
.
Это свойство позволяет сформулировать теорему подобия для плана скоростей: относительные скорости точек жесткого звена образуют на плане скоростей фигуру подобную самому звену и повернутую на 90 ° в направлении его угловой скорости. В подобных фигурах соответствующие стороны пропорциональны
 .
.
В случаях, когда известны скорости двух точек звена, скорости всех остальных точек звена следует искать с помощью теоремы подобия. Необходимо иметь в виду, что при обходе вершин углов подобных фигур на звене и на плане скоростей в одном и том же направлении, например по часовой стрелке, последовательность расположения букв должна быть одинаковой.
2.2. Дано: 1. Линейные размеры звена CDE,
2.  и
и  ускорения точек С и D.
ускорения точек С и D.
План ускорений.
Требуется определить:  .
.
| a |
| б |
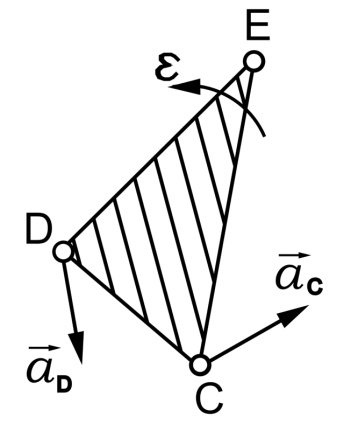
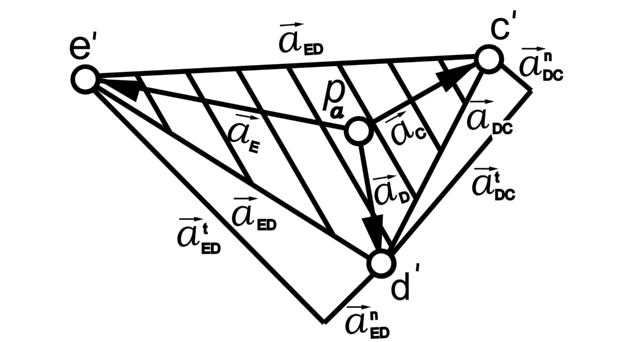
| Рис. 2.12. Определение ускорений точек одного звена. |
При решении задач на отыскание ускорений предполагаем, что все скорости известны. Ускорение  связано с ускорением
связано с ускорением  и
и  зависимостями:
зависимостями:
 ,
,
где  ;
;  .
.
 ,
,
где  ;
;  .
.
Строим план ускорений. Полные относительные ускорения могут быть найдены по известным из механики формулам:
 ,поскольку их соответствующие стороны пропорциональны.
,поскольку их соответствующие стороны пропорциональны.
Это свойство позволяет сформулировать теорему подобия для плана ускорений: полные относительные ускорения точек жесткого звена образуют на плане ускорений фигуру подобную самому звену(при одинаковом направлении обхода фигур чередование букв при вершинах должно быть одинаковым).
 .
.
Дата добавления: 2016-10-26; просмотров: 814;
Поиск по сайту
Узнать еще
- III. Реакции по углеводородному радикалу
- III.1. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
- XLII. ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА
- XXXI. ПОДВЕСНЫЕ МОНОРЕЛЬСОВЫЕ ДОРОГИ
- АВАРИЙНЫЙ КЛАПАН (КРАН ОТКЛЮЧЕНИЯ РАЗДВЕЖНЫХ ДВЕРЕЙ)
- Алгебраический момент силы относительно точки
- Американская белая бабочка – Hyphantria cunea, семейство – Arctidae- медведицы, отряд Lepidoptera
- Аналогично работают ПТК СВШД и системы обнаружения случайных предметов (СОСП).

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
