Индуктивные датчики
Преобразуют линейное или угловое перемещение в изменение индуктивного сопротивления катушки.
 Рисунок 3 – Простейший индуктивный L-датчик
Рисунок 3 – Простейший индуктивный L-датчик
 , (4)
, (4)
где  – магнитная проницаемость воздушного зазора;
– магнитная проницаемость воздушного зазора;  – площадь поперечного сечения воздушного зазора;
– площадь поперечного сечения воздушного зазора;  – воздушный зазор между якорем 1 и сердечником 2.
– воздушный зазор между якорем 1 и сердечником 2.
При изменении воздушного зазора меняется ток I за счёт изменения индуктивного сопротивления катушки. Параметры датчика стремятся рассчитать так, чтобы использовать только линейную часть зависимости тока от воздушного зазора I = f(δ).
 Дифференциальный индуктивный датчик состоит из двух катушек с общим якорем, включённых встречно по отношению друг к другу
Дифференциальный индуктивный датчик состоит из двух катушек с общим якорем, включённых встречно по отношению друг к другу
Рисунок 4 – Дифференциальный L-датчик
При среднем положении якоря L1 = L2 и Uвых = 0. При изменении положения якоря Uвых ≠ 0.
Мкостные датчики
Осуществляется преобразование линейного или углового перемещения рабочего механизма в изменение емкости конденсатора. На рисунке 5 изображены: 1 – подвижная пластина; 2, 3 – неподвижные пластины.
Меняя положение пластин, меняем ёмкость и соответственно напряжение Uвых
Обладают слабой чувствительностью при f=50 Гц и хорошей при f=1000 Гц и выше.
Рисунок 5 – Плоский конденсатор как емкостный датчик
(5) 
 , где
, где  – диэлектрическая постоянная, Ф/м;
– диэлектрическая постоянная, Ф/м;
S – активная площадь конденсатора, м2;
X – расстояние между пластинами.
Используется для измерения перемещений более 1мм.
Ёмкостный датчик с угловым перемещением:
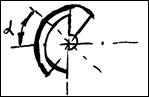
Рисунок 6 – Пластинчатый поворотный конденсатор
 , (6)
, (6)
где S – активная площадь конденсатора при α = 0; α – угловое перемещение, град.; d – диаметр пластин, м.
Цилиндрический ёмкостный датчик:

Рисунок 7 – Цилиндрический С-датчик
 , (7)
, (7)
где r1 , r2 – радиусы внутренний и наружный цилиндров 1 и 2.
Дата добавления: 2016-10-18; просмотров: 2114;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
