СВОЙСТВА ЭЛЕМЕНТОВ АВТОМАТИКИ, ТЕЛЕМЕХАНИКИ И СВЯЗИ
1.1. Общие сведения о системах автоматики, телемеханики и связи
Автоматика и телемеханика (АиТ) – это отрасль науки и техники, разрабатывающая методы и средства управления технологическими процессами без непосредственного участия человека. При этом под автоматикой подразумевается всё изложенное по определению на небольших, а под телемеханикой – на больших, значительных расстояниях.
Железнодорожная автоматика и телемеханика дополнительно выполняет две присущие ей специфические задачи обеспечения высоких интенсивности и безопасности движения поездов.
К особенностям АиТ на современном этапе можно отнести:
- массовый охват всех отраслей народного хозяйства;
- направленность от автоматизации отдельных операций к полной автоматизации производства;
- высокая технико-экономическая эффективность;
- возможность автоматизировать технологические процессы в агрессивной среде, где присутствие человека недопустимо;
- проникновение в сферу умственного труда.
Однако можно отметить и ряд недостатков:
- значительное усложнение систем;
- высокая цена отказа;
- недостаточная надежность;
- удорожание технического обслуживания.
Автоматическим управлением называется управление техническим объектом, осуществляемое без непосредственного участия человека. Роль человека при этом сводится к наблюдению за работой систем автоматического управления (САУ), к их включению или выключению. Если функции управления частично выполняет человек, то такие системы называют автоматизированными.
Система автоматического управления (или автоматическая система) состоит из управляемого объекта (УО) и автоматического управляющего устройства (АУУ), взаимодействующих между собой. Управляемым объектом является устройство, осуществляющее некоторый технический процесс. Правильное выполнение этого процесса определяется совокупностью предписаний, которая называется алгоритмом функционирования. Для выполнения алгоритма функционирования УО необходимо наличие специально организованных воздействий извне со стороны АУУ. Характер этих воздействий определяется совокупностью предписаний, которая называется алгоритмом управления.
Примером САУ служит система автоматического ведения поезда, используемая в метрополитене (рис. 1.1). Управляемым объектом называется поезд, который перевозит пассажиров и грузы (технический процесс). Алгоритм функционирования определяет движение поезда с данной скоростью, остановку его в определенных точках пути (на станциях) и обеспечение безопасности движения. Управление поездом для правильного выполнения им перевозочного процесса осуществляет АУУ – “Автомашинист”.

Рис. 1.1. Структурная схема системы “автомашинист”
В системе автоматического управления (рис. 1.2) устройство предварительной обработки информации 1 воспринимает воздействие внешней среды и внутренние контрольные воздействия. К внешним воздействиям относятся изменения некоторых параметров (температуры, давления и т.п.), воздействия со стороны человека-оператора или другой автоматической системы. Блок 1 содержит разнообразные датчики и органы управления. В задающем или программном устройстве 2, определяющем алгоритм функционирования САУ, записывается программа работы системы с помощью каких-либо запоминающих устройств (перфолента, перфокарта, релейные блоки памяти, программно-запоминающие устройства, вычислительные системы и др.). Устройство 3 формирования команд управления реализует алгоритм управления в зависимости от программы работы системы и поступающих в данный момент времени внешних и контрольных воздействий. Блок 3 реализуется как некоторое логическое или вычислительное устройство и в современных системах содержит обычно микропроцессор или микроЭВМ. Усилительно-преобразовательное устройство 4 усиливает и преобразовывает сигналы управления, вырабатываемые блоком 3, а также включает исполнительное устройство 5. Устройство 5, содержащее двигатели, приводы, реле, клапаны, контакторы и другие исполнительные механизмы, воздействует на управляемый объект 6. С помощью датчиков измерительное устройство фиксирует результаты управления на выходе САУ и подает их на вход системы, чем обеспечивается обратная связь.
Автоматическая система “Автодиспетчер” (рис. 1.3) осуществляет автоматическое управление движением поездов на однопутном участке дороги. Управляемыми объектами являются стрелки и сигналы на промежуточных станциях, для управления которыми каждую станцию оборудуют системой электрической централизации ЭЦ.
Рис. 1.2. Структурная схема САУ

Рис. 1.3. Структурная схема “автодиспетчер”

Рис. 1.4. Структурная схема телемеханической системы
Системы электрической централизации всех станций связаны с диспетчерским пунктом ДП, который находится на крупной участковой станции, с помощью системы диспетчерской централизации ДЦ. Последняя через переходное устройство ПУ взаимодействует с электронно-вычислительной машиной ЭЦВМ. Эти связи являются двусторонними и содержат каналы управления и контроля. По каналу контроля в ЭЦВМ непрерывно поступает информация о поездной ситуации на диспетчерском участке. На основании этой информации и в соответствии с запланированным графиком движения ЭЦВМ сравнивает большое число вариантов и принимает оптимальные решения по регулированию движением поездов. Эти решения по каналу управления через ПУ и ДЦ передаются в систему ЭЦ, где они реализуются.
Таким образом, ЭЦВМ является устройством формирования команд управления, ПУ и ДЦ по каналу управления – усилительно-преобразовательными устройствами, ЭЦ – исполнительным устройством, а ДЦ и ПУ по каналу контроля являются соответственно измерительным устройством и устройством предварительной обработки информации. График движения поездом определяет алгоритм функционирования.
Телемеханика – область технической науки об управлении объектами на расстоянии с помощью посылки специальных кодированных сигналов. Телемеханическая система (рис. 1.4) содержит органы управления и контроля ОУК, управляемые объекты УО, а также устройства кодирования УК и декодирования УД, которые обеспечивают передачу по линии связи большого количества информации по управлению и контролю управляемыми объектами. Часто система телемеханики является составной частою САУ. Например, в системе “Автодиспетчер” системой телемеханики является диспетчерская централизация.
Аналогичную структуру имеют системы связи по передачи данных и речевых сигналов (рис. 1.5). В них передающее Пер У и приемное Пр У устройства решают задачи модуляции и демодуляции сигналов, поступающих к абоненту А, и задачи разделения каналов связи.

Рис. 1.5. Структурная схема системы связи
Любая система автоматики, телемеханики и связи состоит из отдельных элементов. Свойства системы, ее надежность и работоспособность, принципы построения и методы обслуживания зависят от ее структуры, т.е. от способа соединения элементов между собой, так и от свойств самих элементов. Поэтому изучение теоретических основ автоматики, телемеханики и связи необходимо начать с изучения элементов, из которых строятся эти системы.
1.2. Классификация элементов
Элементом автоматики называется простейшее автоматическое устройство, которое преобразует входной сигнал х в выходной сигнал y.
Преобразование сигналов может быть количественным, качественным или информационным. При количественном преобразовании сигналы x и y имеют одинаковую равномерность, но отличаются по параметрам (амплитуда, частота, фаза и т.п.). К элементам, осуществляющим количественное преобразование, относятся усилители, трансформаторы, стабилизаторы и др. При качественном преобразовании преобразуется род энергии и сигналы x и y имеют различную размерность. Такое преобразование выполняют датчики, двигатели, генераторы и др.
Информационное преобразование происходит тогда, когда на выходе элемента отражается некоторая информация о состоянии его входов. Такое преобразование могут осуществлять логические элементы. Элемент (рис. 1.6), построенный на двух диодах и резисторе, реализует логическую функцию ИЛИ. На выходе y отрицательный потенциал появляется только тогда, когда имеется отрицательный потенциал на входе x1 или на входе x2, т.е. нажата кнопка x1 или x2.
В зависимости от характера функциональной связи y = f(x) различают элементы непрерывного и дискретного действия. В элементах непрерывного действия при непрерывном изменении входного сигнала x непрерывно изменяется выходной сигнал y (рис. 1.7, а). Некоторые элементы обладают свойством гистерезиса, когда значения y при увеличении и уменьшении x не совпадают (рис. 1.7, б). В элементах дискретного действия при непрерывном изменении сигнала x наблюдается скачкообразное изменение выходного сигнала (рис. 1.7, в). При этом непрерывному изменению x в определенных пределах соответствует неизменное (или почти неизменное) значение y.
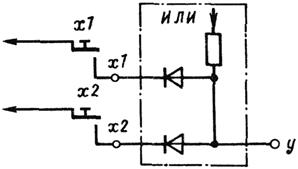
Рис. 1.6. Схема логического элемента ИЛИ
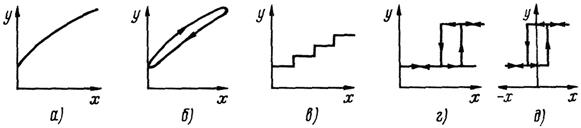
Рис. 1.7. Функциональные связи
Таким образом, множество состояний таких элементов является дискретным, и их называют также многоустойчивыми. Наибольшее распространение имеют элементы с двумя устойчивыми состояниями (рис. 1.7, г). Зависимость y = f(x) (рис. 1.7, г) обладает свойством гистерезиса и называется релейной. Частным случаем этой зависимости является релейная зависимость с памятью (рис. 1.7, д). В этом случае при снятии входного сигнала (x = 0) элемент запоминает свое предшествующее состояние.
В зависимости от выполняемых функций в структуре САУ (см. рис. 1.2) элементы подразделяют на начальные (измерительные), промежуточные (управляющие) и конечные (исполнительные).
Измерительные элементы, расположенные на входах автоматической системы, составляют основную массу элементов, из которых строится устройство предварительной обработки информации и измерительное устройство (блоки 1 и 7). Это всевозможные датчики, реагирующие на изменения внешних и внутренних параметров. Например, в системах железнодорожной автоматики применяют датчики свободности участков пути от подвижного состава, датчики контроля исправности ламп светофоров, положения стрелок и др.
Управляющие элементы, обычно составляющие основную массу элементов САУ, получают сигналы от измерительных элементов и реализуют алгоритм функционирования данной системы. Управляющие элементы усиливают и преобразовывают сигналы, реализуют память, осуществляют логические зависимости и вычисления, воздействуют на исполнительные элементы. Из них строят программное устройство, устройство формирования команд управления и усилительно-преобразовательное устройство (блоки 2, 3 и 4).
Исполнительные элементы, образующие блок 5 в структуре САУ, воздействуют на управляемые объекты. К ним относятся электрические, пневматические и гидравлические приводы, различные клапаны, электромагнитные механизмы и др.
Элементы автоматики, выполняющие одинаковые функции, могут быть реализованы с использованием различных видов энергии. Наибольшее распространение получили электрические элементы – электромагнитные, электродинамические, электронные, полупроводниковые, магнитные и др. Применяют также гидравлические, пневматические, акустические, оптические и тепловые элементы.
1.3. Общие характеристики элементов
Независимо от принципа действия, конструкции и природы физических процессов все элементы автоматики имеют общие характеристики, позволяющие сравнивать их друг с другом. Такими характеристиками являются, например, абсолютная и относительная погрешности.
Под абсолютной погрешностью понимают разность между фактической выходной величиной yф и ее расчетным значением yр, т.е. Δу = уф - ур. Абсолютная погрешность имеет размерность выходной величины.
Под относительной погрешностью понимают отношение абсолютной погрешности к расчетному значению выходной величины, δ = Δу / ур100%.
Относительная погрешность – величина безразмерная и удобна для сравнения точности работы различных элементов.
Общей характеристикой элементов является их чувствительность (передаточный коэффициент). В статическом режиме она определяется как отношение выходной величины к входной:  . В динамическом режиме (дифференциальная чувствительность) ее определяют как отношение приращений входной и выходной величин:
. В динамическом режиме (дифференциальная чувствительность) ее определяют как отношение приращений входной и выходной величин:  . Для конкретных элементов чувствительность часто имеет специальное название, например коэффициент усиления, коэффициент трансформации и т.д.
. Для конкретных элементов чувствительность часто имеет специальное название, например коэффициент усиления, коэффициент трансформации и т.д.
Если элемент имеет обратную связь (рис. 1.8), то его характеристикой является коэффициент обратной связи β, который показывает, какая часть выходной величины y подается на вход элемента:  . Обратная связь может быть положительной или отрицательной. Положительная обратная связь обеспечивает увеличение общего передаточного коэффициента. При введении отрицательной обратной связи достигается стабилизация общего передаточного коэффициента, т.е. ослабление его зависимости от колебаний коэффициента k основного элемента. Величина передаточного коэффициента элемента определяется по выражению
. Обратная связь может быть положительной или отрицательной. Положительная обратная связь обеспечивает увеличение общего передаточного коэффициента. При введении отрицательной обратной связи достигается стабилизация общего передаточного коэффициента, т.е. ослабление его зависимости от колебаний коэффициента k основного элемента. Величина передаточного коэффициента элемента определяется по выражению  , где “ - “ при положительной, а “ + ” - при отрицательной обратной связи.
, где “ - “ при положительной, а “ + ” - при отрицательной обратной связи.

Рис. 1.8. Элемент с обратной связью
Важнейшей характеристикой всех элементов является их надежность, т.е. свойство выполнять заданные функции, сохраняя во времени значения установленных эксплуатационных показателей в заданных пределах.
Одним из основных показателей надежности является интенсивность отказов:
λ =  ,
,
где N(t) – число элементов, работоспособных к моменту времени t; N(t + Δt) -число элементов, работоспособных к моменту времени t + Δt; Nср(Δt) - среднее число элементов, работоспособных за время Δt.
По интенсивности отказов могут быть вычислены многие основные показатели надежности, например вероятность безотказной работы и средняя наработка до отказа.
При оценке качества элементов автоматики существенное значение имеет быстродействие их работы. При этом рассматриваются такие показатели как постоянная времени, время включения, время выключения и др.
Логические элементы, осуществляющие информационное преобразование сигналов, имеют ряд специальных общих характеристик: число входов и коэффициент разветвления. Чем больше число входов, тем больше логические возможности элемента. Однако, это число ограничивается размерами и стоимостью элемента. Коэффициент разветвления характеризует число элементов, которым может управлять данный элемент, т.е. определяет его нагрузочную способность.
Существуют и другие характеристики элементов автоматики, телемеханики и связи, которые будут рассмотрены в соответствующих разделах.
1.4. Датчики
Датчики являются органами чувств систем АиТ. Они выполняют функции начальных или измерительных элементов. С их помощью автоматические системы получают внешнюю информацию. Точность и надежность работы датчиков во многом определяют соответствующие характеристики работы системы в целом. Датчики должны иметь высокую чувствительность и точность, длительный срок службы и безотказность в работе, малые размеры и массы, низкую стоимость.
Датчик состоит из воспринимающей, промежуточной и исполнительной частей. Воспринимающая часть реагирует на изменение входной величины x и преобразовывает ее в некоторую промежуточную величину, которая сравнивается с эталонным значением аналогичной физической величины, а затем воздействует на исполнительную часть датчика, которая формирует выходной сигнал y.
В зависимости от физической природы входной величины x различают электрические, тепловые, механические, оптические, акустические, жидкостные и газовые датчики. Электрические датчики измеряют ток, напряжения, мощность, частоту, магнитный поток; тепловые – температуру и количество теплоты; механические – силу, давление, перемещение, скорость, ускорение; оптические – силу света; акустические – силу звука, его частоту и мощность; жидкостные и газовые – давление и скорость.
В свою очередь датчики каждого вида классифицируют по принципу действия воспринимающей части. Например, оптические датчики бывают фотоэлектрические, фотохимические, фототермические и фотомеханические.
Другой вид датчиков определяется физической природой выходной величины y. Наиболее широко распространены датчики с электрической выходной величиной – это датчики сопротивления, индуктивности, емкости, тока, напряжения, фазы, частоты.
В зависимости от числа преобразований входной величины x, которые происходят в датчике, различают датчики с непосредственным и промежуточным преобразованиями. В датчиках с непосредственным и промежуточным преобразованием входная величина x непосредственно преобразуется в выходную величину y. Эти датчики наиболее просты по конструкции, так как у них отсутствует промежуточная часть. В датчиках с промежуточным преобразование может происходить несколько преобразований входной величины.
По виду преобразования х → у датчики делятся на два класса: с непрерывным и дискретным преобразованиями. Датчики с непрерывным преобразованием являются измерительными. В них непрерывному изменению величины x соответствует непрерывное изменение величины y. Датчики с дискретным преобразованием контролируют состояние дискретных объектов, т.е. объектов, имеющих конечное число состояний. Большинство контролируемых объектов являются двухпозиционными и имеют два состояния – “включен” и “выключен”. Поэтому дискретные датчики обычно являются датчиками двоичной информации, у которых выходная величина у = 0 или у = 1.
В связи с развитием полупроводниковой техники и широким применением в современных системах автоматики микропроцессоров и микроЭВМ появились и новые тенденции в развитии датчиков. Эти тенденции определяются тем, что датчики должны работать совместно с микропроцессорами и микроЭВМ. Поэтому ценными качествами современных датчиков являются их интегральное исполнение и малые размеры. Последнее позволяет изготовлять в одном корпусе несколько датчиков и получать таким образом комбинированный датчик для измерения нескольких физических параметров одновременно. Интегральное исполнение позволяет также встраивать датчики в другие схемы интерфейса микроЭВМ. Перспективным направлением развития является изготовление “интеллектуальных” датчиков. В этом случае датчики и микропроцессор размещают в одном корпусе, что позволяет сразу же обрабатывать сигналы, поступающие от датчиков.

Рис. 1.9. Датчики сопротивления
Датчики с непосредственным преобразованием. Простейшим датчиком с непосредственным преобразованием является тензодатчик (рис. 1.9, а), который применяют для измерения деформаций и механических напряжений на поверхности деталей. Тензодатчик изготовляют из проволоки П с высоким удельным сопротивлением (константан) и малым диаметром (0,006 - 0,020 мм), которую в виде равных и частых петель располагают между двумя листами тонкой бумаги Б и приклеивают к ним. К концам проволоки припаивают медные проводники (выводы), с помощью которых тензодатчик включают в измерительную схему. Тензодатчик плотно приклеивают на поверхность детали, и он деформируется вместе с ней. Относительное изменение сопротивления R пропорционально деформации  и напряжению на поверхности детали:
и напряжению на поверхности детали:
 ,
,
где k – постоянная величина.
В тензодатчике механическая величина (деформация) непосредственно преобразуется в электрическую (сопротивление).
Просты по конструкции и термодатчики, в которых температура преобразуется в напряжение (термопары) или сопротивление (термосопротивления). Последние (рис. 1.9, б) изготовляют из стальной, никелевой или платиновой проволоки, сопротивление которой зависит от температуры. Для измерения температуры применяют термочувствительные ферриты и конденсаторы, у которых изменяется магнитная и диэлектрическая проницаемость. В термочувствительных диодах и тиристорах используется температурная зависимость проводимости p – n перехода на кристалле кремния.
К датчикам сопротивления относится широко распространенный реостатный датчик (рис. 1.9, в), который преобразовывает линейные перемещения механизмов в соответствующие сопротивления R. При перемещении движка D на расстояние x пропорционально изменяется сопротивление R реостата.

Рис. 1.10. Схемы измерения толщины
В индуктивных датчиках измеряемая величина преобразуется в индуктивность. Датчик (рис. 1.10, а) измеряет толщину h листа из ферромагнитного материала. Если значение h увеличивается, то уменьшается воздушный зазор d, индуктивность обмотки O увеличивается, что фиксирует измерительная схема.
В емкостных датчиках используется зависимость емкости конденсатора от площади пластин, расстояния между ними и диэлектрической постоянной. Емкостными датчиками можно измерять линейные и угловые перемещения, размеры, температуру, относительную влажность воздуха и другие параметры. Емкостный датчик (рис. 1.10, б) измеряет толщину листа h из диэлектрика, который располагается между пластинами А и Б конденсатора.

| 
|
| Рис. 1.11. Схема датчика инфракрасного излучения | Рис. 1.12. Схемы датчиков с промежуточным преобразованием |
Оптический датчик инфракрасного излучения (рис. 1.11) измеряет температуру нагретого тела. Он состоит из линзы 2, которая фиксирует инфракрасные лучи, испускаемые нагретым телом 1, на поверхности чувствительного элемента 3. В результате этого изменяется сопротивление элемента или на выводах 4 и 5 появляется напряжение. Подобный датчик (болометр) используют в аппаратуре автоматического обнаружения перегретых букс в поездах.
Датчики с промежуточным преобразованием. Эти датчики состоят из нескольких датчиков с непосредственным преобразованием, которые работают последовательно. При этом выходная величина одного датчика является входной величиной следующего.
Датчик (рис. 1.12, а) преобразует угловую скорость ω в емкость конденсатора C. Воспринимающей частью датчика является центробежный регулятор, который преобразует угловую скорость в центробежную силу, сравниваемую с силой сжатия пружины П (промежуточная часть). В промежуточной части сила вызывает перемещение dx нижней муфты регулятора, которая связана с верхней обкладкой конденсатора C. Конденсатор является исполнительной частью датчика, его емкость изменяется с изменением расстояния dС между пластинами.
Датчик (рис. 1.12, б) преобразует напряжение U в частотe f переменного тока. Напряжение U измеряется вольтметром V, стрелка которого связана с конденсатором C переменной емкости. Конденсатор C включен в задающий контур генератора G, частота f на выходе которого зависит от емкости C. Таким образом, в датчике осуществляется следующие преобразования: U → угловое перемещение стрелки вольтметра V → C → f.
Датчики с дискретным преобразованием. Эти датчики контролируют состояние объектов и являются источниками входной информации в системах железнодорожной автоматики и телемеханики.
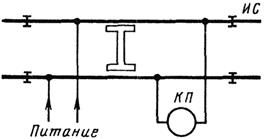
Для контроля свободности участка пути от подвижного состава используют рельсовую цепь (рис. 1.13). Рельсовой цепью является часть участка, ограниченная изолирующими стыками ИС. На одном конце рельсовой цепи к рельсам подключают питание, а на другом – контрольный прибор КП, реагирующий на ток в рельсах, которые используют как проводники. В качестве КП обычно применяют электромагнитное или индукционное реле. Если участок свободен, то через КП протекает большой ток (якорь реле притянут). При занятии участка хотя бы одной колесной парой, сопротивление которой 0,06 Ом во много раз меньше сопротивления КП, ток в последнем резко уменьшается (реле отпускает якорь). Таким образом, по состоянию КП можно судить о свободности или занятости участка пути.
| 
|
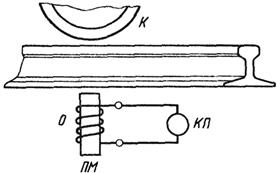
| Рис. 1.13. Схема рельсовой цепи | Рис. 1.14. Магнитная педаль |
Магнитный датчик (рис. 1.14) фиксирует прохождение скатов вагонов через определенную точку пути. Такой датчик называется бесконтактной магнитной медалью и состоит из постоянного магнита ПМ, обмотки О и контрольного прибора КП. Педаль располагают около рельса. При приближении колеса К к педали параметры магнитного поля вокруг магнита ПМ изменяются, в результате чего в обмотке О возникает электродвижущая сила, по ней начинает протекать ток, что фиксирует контрольный прибор КП.
1.5. Исполнительные элементы
Исполнительные элементы в системах автоматики непосредственно воздействуют на управляемые объекты. На железнодорожном транспорте надо управлять стрелками, светофорами, вагонными замедлителями, шлагбаумами, тормозами поездов и другими объектами. В качестве исполнительных элементов применяют электродвигательные, электромагнитные, пневматические и гидравлические приводные механизмы.

| 
|
| Рис. 1.15. Схема механической передачи электропривода | Рис. 1.16. Кинематическая схема вагонного замедлителя |
Электромагнитные механизмы широко распространены и применяются для дистанционного управления, когда требуются значительные усилия для перемещения в пространстве каких-либо частей управляемого объекта. При этом используются электродвигатели постоянного и переменного тока. Электродвигатель соединяется с объектом через механический редуктор.
Электропривод (рис. 1.15) содержит электродвигатель 1 постоянного или переменного тока, вал 2 которого связан с промежуточным валом 4 с помощью первой ступени редуктора (шестерни 3,12 и фрикционное сцепление 13). Вторая ступень редуктора (шестерни 5 и 11) связывают вал 4 и главный вал 6 с рабочей шестерней 7. Последняя посредством зубчатой передачи взаимодействует с шибером 8, в результате чего вращение главного вала преобразуется в поступательное движение шибера. С помощью рабочих тяг 9 шибер связан с остряками 10 стрелочного перевода, которые перемещаются вместе с перемещением шибера.
Электромагнитные механизмы (клапаны, задвижки, муфты, контакторы) применяют, если требуется незначительные усилия и небольшие перемещения. Когда привод должен создавать большие силы и значительные перемещения, часто используют пневматические и гидравлические механизмы. Их достоинствами являются простота и надежность конструкции, отсутствие сильных ударов и невысокая стоимость.
Пневматический вагонный замедлитель используют для торможения вагонов при спуске их с горба сортировочной горки. Замедлитель содержит тормозной цилиндр 2 (рис. 1.16), рычаги 3 и 7, две тормозные балки 4 с укрепленными на них тормозными шинами 5. при подаче сжатого воздуха в цилиндр с помощью штока 1 рычаги 3 и 7 раздвигаются и тормозные шины, сближаясь, плотно прижимаются к боковым поверхностям колеса 6.
Дата добавления: 2019-02-08; просмотров: 1792;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- B — число подмножеств, то частное а : b - это число элементов в каждом подмножестве.
- I. Товар и его свойства.
- II. Стоимость отдельных элементов капитала
- II.3. Физико-химические свойства нефтей и природных газов
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- IV. Права и обязанности пользователей и организаций почтовой связи

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
