Исполнительные механизмы.
Электрические исполнительные элементы.Исполнительными элементами называются устройства, служащие для перестановки регулирующего органа. Исполнительные элементы питаются от какого-либо постороннего источника и воспроизводят на своем выходе маломощные управляющие сигналы, поданные на вход. Иногда их называют также сервомоторами или сервоприводами.
По виду используемой энергии исполнительные элементы подразделяются на электрические, гидравлические и пневматические (поршневые или мембранные). По принципу действия исполнительные элементы делятся на сервоприводы с постоянной и с пропорциональной скоростью перемещения.
Скорость перемещения сервоприводов с постоянной скоростью не зависит от отклонения регулируемой величины от заданной. Такие характеристики обычно имеют электрические исполнительные механизмы, управляемые релейным регулирующим устройством. У сервоприводов с пропорциональной скоростью имеет место линейная зависимость скорости движения выходного вала или штока поршня от отклонения регулируемой величины. Гидравлические и пневматические сервоприводы обычно относятся к исполнительным элементам с пропорциональной скоростью.
Электрические исполнительные элементы служат для преобразования электрического тока в механическое перемещение с целью воздействия на регулирующий орган объекта управления. Они применяются для включения и отключения механических, пневматических и гидравлических цепей: сцепления и расцепления вращающихся валов; открытия и закрытия клапанов, вентилей, золотников и задвижек; плавного перемещения или поворота различных подвижных деталей на углы, зависящие от величины подводимого тока. Электрические исполнительные элементы представляют собой электромагниты различных конструкций и электрические двигатели.
Электромагнитные исполнительные механизмы сочленяются с вентилями и электромагнитными муфтами. Электромагнит при возбуждении катушки втягивает якорь, который соединен с вентилем и открывает доступ жидкости или газу. При отключении тока вентиль закрывается.
Электромагнитные муфты служат для включения и отключения механических передач. На ведущем валу муфты укреплен электромагнит с обмоткой возбуждения. На ведомом - тарельчатый якорь, который скользит вдоль вала, но не может поворачиваться из-за наличия шпонки. Когда ток в электромагните отсутствует, якорь удерживается пружиной и ведущий вал не связан с ведомым. При возбуждении электромагнита якорь притягивается к нему и вращающий момент передается на ведомый вал за счет силы трения между поверхностями якоря и электромагнита. Трущиеся поверхности изготовляются из материалов с большим коэффициентом трения и малым износом типа стали, чугуна и специальных сплавов.
Регулировать скорость вращения ведомого вала с помощью электромагнитной муфты трения при постоянной скорости вращения ведущего вала затруднительно. Поэтому регулирование осуществляют путем импульсного управления муфтой, при котором средняя скорость ведомого вала зависит от соотношения продолжительности импульсов тока, подаваемых на обмотку муфты, и пауз между ними.
Существуют муфты с ферромагнитной массой, которые позволяют плавно регулировать передаваемый вращающий момент. В конструкции такой муфты на ведущем валу укреплен электромагнит с обмоткой возбуждения, а на ведомом — цилиндр, у которого промежуток между внутренней поверхностью и электромагнитом заполнен ферромагнитным порошком, смешанным с маслом или графитом. Этот порошок обычно изготавливается из карбонильного железа.
Когда ток к электромагниту не подводится, передаваемый момент очень мал, так как он определяется лишь вязкостью ферромагнитной массы. При возбуждении электромагнита порошок намагничивается и появляются силы сцепления частиц между собой и с поверхностями электромагнита и цилиндра. По мере увеличения тока соответственно увеличиваются силы сцепления и величина момента, передаваемого муфтой.
С помощью электродвигателей, применяемых в исполнительных механизмах автоматических систем, электрическая энергия превращается в механическое перемещение. Различают электродвигатели постоянного и переменного тока. В зависимости от целевого назначения их можно разделить на две большие группы: двигатели для нерегулируемого привода и двигатели для регулируемого привода. Двигатели первой группы должны обеспечивать приблизительно постоянную скорость вращения и в случае необходимости изменять направление вращения на обратное. К двигателям второй группы предъявляются более высокие требования: они должны быстро и плавно запускаться, тормозиться, менять направление вращения и иметь широкий диапазон регулирования скорости. Кроме того, поскольку управление двигателем в регулируемом приводе обычно осуществляется изменением напряжения, подводимого к его обмоткам, необходимо, чтобы скорость и направление вращения соответствовали величине и знаку напряжения.
Наиболее часто в системах автоматики применяются электродвигатели с независимым возбуждением, в которых магнитный поток создается с помощью обмотки, питаемой от независимого источника: в электродвигателях малой мощности поток создается с помощью постоянного магнита. К цепи якоря подводится входное напряжение U1 Вращающий момент МВ, развиваемый двигателем постоянного тока, пропорционален произведению тока якоря IЯ и потока возбуждения Ф:

где kм - коэффициент.
Ток якоря IЯзависит от входного напряжения U1 и от скорости вращения якоря  . При вращении двигателя в обмотке якоря создается противоэлектродвижущаяся сила
. При вращении двигателя в обмотке якоря создается противоэлектродвижущаяся сила  ,следовательно, пренебрегая индуктивностью якорной цепи, можно записать:
,следовательно, пренебрегая индуктивностью якорной цепи, можно записать:
где ke - коэффициент.
Подставляя это выражение в формулу , получим:
Из этой формулы видно, что при заданном напряжении момент максимален при = 0, т. е. при пуске двигателя. Пусковой момент двигателя определяется выражением:
т.е. пропорционален приложенному к якорю напряжению.
При увеличении скорости вращения двигателя момент уменьшается. В предельном случае, когда момент нагрузки равен нулю, т.е. на холостом ходу, момент МВ=0 и угловая скорость вращения холостого хода  также пропорциональна приложенному к якорю напряжению:
также пропорциональна приложенному к якорю напряжению:
Следовательно, изменяя напряжение, подводимое к якорю, можно управлять скоростью вращения двигателя. Если момент нагрузки Мнна валу двигателя не равен нулю, то при малых значениях напряжения момент вращения будет недостаточен для приведения двигателя во вращение. Обозначим напряжение трогания, при котором начинается вращение через Uт. Для определения Uт воспользуемся формулой , подставляя Uт=U1и Мн=Мп,получим:
Статическая характеристика двигателя, выражающая зависимость Q = f± (t/2) при различных значениях момента нагрузки, представляется в виде ломаных прямых (рис.3.16, а), состоящих из горизонтальных (при U1<Uт) и наклонных (при U1>Uт) участков. При наличии моментов нагрузки 0<Мн1<Мн2 характеристика имеет зону нечувствительности.
Зависимость скорости вращения якоря от момента нагрузки при фиксированном напряжении на основании формул и получается в виде:
Эта зависимость имеет вид прямой (рис.3.16, б), соединяющей точки холостого хода (МП=0;  ) и пуска (МП=Мп; =0). Чем круче опускается характеристика, тем больше скорость вращения зависит, от изменений момента нагрузки.
) и пуска (МП=Мп; =0). Чем круче опускается характеристика, тем больше скорость вращения зависит, от изменений момента нагрузки.
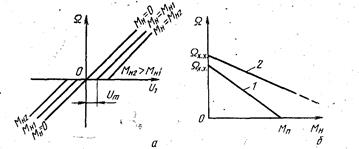
Рис.3.16. Основные характеристики двигателя постоянного тока:
а - зависимость скорости от напряжения; б - зависимость скорости от момента
Поэтому характеристики =f2(Мн)называются мягкими 1, если они имеют крутой наклон, и жесткими 2, если они идут полого. Чем больше отношение пускового момента к скорости холостого хода, тем жестче характеристика.
При использовании электродвигателя в регулируемом приводе большое значение имеют его динамические свойства. Считая, что вращающий момент двигателя МВ служит для преодоления динамического момента МД и момента сопротивления МС, равного сумме нагрузочного момента и момента трения, можно записать:

где J - момент инерции вращающихся частей двигателя.
Учитывая соотношения и , можно получить уравнение движения, пренебрегая моментом сопротивления и индуктивностью якорной цепи, в виде:
 ,
,
где  - электромеханическая постоянная времени; k=1/кеФ - коэффициент усиления.
- электромеханическая постоянная времени; k=1/кеФ - коэффициент усиления.
Таким образом, двигатель можно рассматривать в качестве инерционного звена, если входом является напряжение U1 а выходом - скорость вращения . При учете индуктивности якорной цепи согласно уравнению  получим:
получим:

Тогда уравнение запишется в виде:
где ТЯ = LЯ/RЯ- электромагнитная постоянная времени якорной цепи двигателя. Передаточные функции двигателя могут быть соответственно представлены в следующей форме:

или с учетом индуктивности якорной цепи:

Если в качестве выходной величины двигателя рассматривать угол поворота выходного вала а, который связан со скоростью соотношением  , то передаточные функции двигателя записываются как:
, то передаточные функции двигателя записываются как:

и

Это означает, что двигатель можно рассматривать как соединенные последовательно интегрирующее и инерционное звенья или при учете индуктивности якорной цепи - как интегрирующее звено и звено второго порядка.
Для современных двигателей постоянного тока ТД составляет в среднем 0,05÷0,1 с при условии, что приведенный момент инерции вращающихся частей, находящихся на валу двигателя, мал по сравнению с моментом инерции самого якоря. Если с якорем двигателя связаны какие-либо движущиеся части, имеющие большой момент инерции, то постоянная времени ТД должна быть соответственно увеличена.
Наиболее часто в устройствах автоматики применяют двухфазный индукционный двигатель переменного тока, который состоит из статора, имеющего две обмотки W1 и W2, и короткозамкнутого ротора. Статорные обмотки расположены под углом 90о друг к другу (рис.3.17, а). Одна из обмоток питается от сети переменного тока напряжением постоянной амплитуды, а на другую управляющую обмотку подается напряжение U2 с изменяемой амплитудой, которое сдвинуто по фазе на 90° относительно напряжения первой обмотки. Величина и направление скорости вращения индукционного двигателя зависит от величины и фазы напряжения на управляющей обмотке. При изменении фазы управляющего напряжения на 180° направление вращения ротора меняется на обратное. Суммарный поток статора Фс складывается из двух взаимно перпендикулярных потоков Ф1 и Ф2 (рис.3.17, б). Оба потока изменяются во времени по синусоидальному закону со сдвигом по фазе на 90°:
где Ф1м и Ф2М - амплитуды потоков;  - угловая частота питающего напряжения.
- угловая частота питающего напряжения.
Результирующий вектор магнитного потока равен по модулю
и ориентирован в пространстве под углом  , причем
, причем

Если принять, что  , то получим:
, то получим:


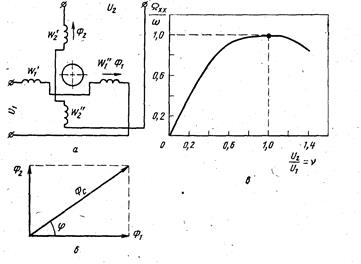
Рис.3.17. Схема и характеристики двухфазного асинхронного двигателя: а - схема; б - диаграмма потоков; в - характеристика
При v=1 Фс=Ф1м=const и  , т.е. суммарный вектор поля постоянен по величине и вращается с постоянной скоростью w. Поскольку конец вектора Фс при этом описывает окружность, то такой режим называется режимом кругового поля. При изменении фазы напряжения U2 на 180° поток Ф2 меняет направление на обратное, а суммарный вектор поля вращается в другую сторону.
, т.е. суммарный вектор поля постоянен по величине и вращается с постоянной скоростью w. Поскольку конец вектора Фс при этом описывает окружность, то такой режим называется режимом кругового поля. При изменении фазы напряжения U2 на 180° поток Ф2 меняет направление на обратное, а суммарный вектор поля вращается в другую сторону.
Ротор индукционного двигателя может представлять собой магнитопроводящий цилиндр, набранный из изолированных стальных листов для уменьшения потерь, в продольные пазы которого заложены проводники из меди или алюминия, замыкаемые с торцов двумя токопроводящими кольцами. В другой конструкции магнитопровод и токоведущие части разделены: магнитопровод выполнен в виде неподвижного гладкого цилиндра, а ротор в виде тонкостенного стакана из алюминия. Принцип действия и основные характеристики у двигателей с роторами обоих типов одинаковы.
Вращающий момент в двухфазном индукционном двигателе возникает за счет взаимодействия индукционных токов, наводимых в роторе, вращающимся полем статора. Этот момент пропорционален произведению потоков Ф1 и Ф2 обмоток статора или (когда материал магнитно не насыщен) произведению напряжений U1 U2 и синусу угла сдвига фаз у между ними:
 ,
,
где k1 - коэффициент.
Обычно принимают  =90°, т.е. sin =1.
=90°, т.е. sin =1.
При пуске двигателя пусковой момент Мп определяется аналогичным выражением:

Так как напряжение U1 постоянно, то пусковой момент прямо пропорционален напряжению U2.
При вращении ротора в нем наводятся дополнительные токи, вызывающие появление тормозящего момента, пропорционального сумме квадратов магнитных потоков Ф1 и Ф2 и угловой скорости вращения. Учитывая связь магнитных потоков и приложенных напряжений (при ненасыщенной стали), можно написать:
 ,
,
где k2 - коэффициент.
Вращающий момент равен разности указанных моментов:

Для нахождения скорости холостого хода достаточно принять МВ = 0. Тогда:
Зависимость скорости холостого хода от коэффициента v показана на рис.3.16, в. По динамическим свойствам этот двигатель относится к инерционным звеньям. Постоянная времени Т для индукционных двигателей равна примерно 0,03÷0,1 с.
В исполнительных механизмах типа МЭО (механизмы исполнительные электрические однооборотные) широко применяются двухфазные асинхронные электродвигатели. Преобразование электрического сигнала во вращательное движение осуществляется в них при помощи электродвигателя и редуктора. Положение выходного вала определяется индуктивными или потенциометрическими датчиками обратной связи. Реверсирование двигателя достигается изменением фазы напряжения на обмотке управления.
Гидравлические и пневматические исполнительные механизмы.В устройствах автоматики наибольшее распространение получили гидравлические поршневые и лопастные исполнительные механизмы.
Поршневой исполнительный механизм поступательного типа состоит из цилиндра 2, внутри которого движется поршень со штоком 3 (рис.3.18, а). Для перемещения поршня нужно преодолеть силы трения F, нагрузку на штоке R и противодавление жидкости с другой стороны поршня.
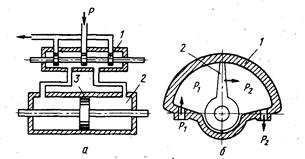
Рис.3.18. Поршневой (а) и лопастный (б) исполнительные механизмы
Условие движения может быть выражено уравнением вида:
 ,
,
где Р - давление жидкости на поршень, направленное в сторону движения; Рп- противодавление жидкости со стороны слива; S - площадь поршня.
Скорость движения поршня V=Q/S, где Q - объемный расход рабочей жидкости. Следовательно, скорость перемещения штока поршня  , где у - величина перемещения штока, пропорциональна расходу жидкости Q, которая является входной величиной и регулируется управляющим элементом 1. Поэтому такие исполнительные механизмы следует отнести к интегрирующим звеньям, так как можно записать:
, где у - величина перемещения штока, пропорциональна расходу жидкости Q, которая является входной величиной и регулируется управляющим элементом 1. Поэтому такие исполнительные механизмы следует отнести к интегрирующим звеньям, так как можно записать:

Поршневой сервомотор с кривошипной передачей состоит из цилиндра, поршня, шатуна и кривошипа. Последний укреплен на валу, конец которого через сальниковое уплотнение выведен из картера.
В зависимости от положения управляющего элемента масло поступает в правую или левую полости цилиндра, перемещая поршень в соответствующем направлении. Это обусловливает поворот кривошипа на определенный угол. Такие сервомоторы имеют переменный вращающий момент, который зависит от угла поворота.
Исполнительные механизмы лопастного типа (рис.3.18, б) сразу обеспечивают на выходе вращательное движение вала при давлении Р1>Р2 (угол поворота достигает 300°). Такой механизм представляет собой цилиндр 1, внутри которого вращается лопасть 2. Рабочая жидкость поступает через каналы, расположенные по обе стороны от лопасти.
Гидравлические исполнительные механизмы просты по конструкции и надежны в эксплуатации. Их недостатком является необходимость установки гидравлических усилителей на небольшом расстоянии. При большом удалении происходит значительная потеря энергии в соединительных трубопроводах, которая не должна превышать 10÷15% от рабочего перепада давлений в камерах исполнительного механизма.
В мембранных исполнительных механизмах в качестве энергоносителя применяется воздух, поступающий через усилитель или непосредственно от измерительного элемента. Основной рабочей деталью этого исполнительного механизма является мембрана, которая может быть плоской и гофрированной. Перестановочная сила плоской мембраны из гибкого материала сильно изменяется по длине хода.
Увеличение перестановочной силы достигается применением кольцевой диафрагмы, представляющей собой кольцо, внутренний край которого (зажат между двумя дисками, закрепленными на штоке, а наружный - между двумя неподвижными металлическими кольцами. Благодаря высокой жесткости средней части мембраны активная площадь кольцевой мембраны увеличивается, а следовательно, перестановочная сила также увеличивается по сравнению с гибкой мембраной. В то же время у кольцевой мембраны ниже чувствительность.
В некоторых исполнительных механизмах применяются также более сложные мембраны - сильфоны, представляющие собой пустотелую коробку с гармоникообразной поверхностью.
Реле– этопростое автоматическое устройство, приводящее в действие одну или несколько управляемых цепей при достижении параметров управляющей цепи определенного значения. Вопросы автоматического управления, регулирования, защиты, блокировки решаются с помощью различного рода реле.
Любое реле состоит из трех основных частей: измерительной, промежуточной и исполнительной. Поэтому большинство реле может быть получено из рассмотренных выше датчиков путем присоединения к ним исполнительной части.
В системах автоматики наибольшее распространение получили электромеханические реле электромагнитные, электродинамические, магнитоэлектрические и др.), в которых изменение входной электрической величины вызывает механическое перемещение якоря, приводящее к замыканию или размыканию электрических контактов. В последнее время широко применяют также электронные реле как контактные, так и бесконтактные.
Различают электромагнитные реле постоянного и переменного тока. В свою очередь реле постоянного тока подразделяются на нейтральные и поляризованные. Нейтральное реле одинаково реагирует на постоянный ток обоих направлений, протекающий по его обмотке. Действие поляризованного реле зависит от направления, тока.
Устройство и схема включения электромагнитного реле приведены на рис.3.19, а, б. Реле представляет собой электромагнит с обмоткой W, по которой проходит ток I1. При определенной величине тока срабатывания Iср к сердечнику С электромагнита притягивается якорь Я. При этом контакты К1другой электрической цепи замыкаются рычагом Р и по нагрузке RH проходит ток 12. Контакты К2, наоборот, размыкаются, обесточивая свою цепь.
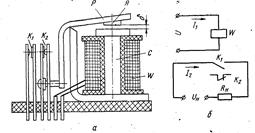
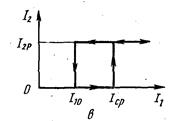
Рис.3.19. Устройство и схема включения электромагнитного реле:
а - устройство; б - схема включения; в - характеристика
Реле является усилителем мощности: в первичной цепи обмотки W при прохождении тока I1расходуется мощность Р1 а во вторичной цепи контактов при прохождении тока - мощность Р2, значительно большая, чем P1 Таким образом, с помощью источника малой мощности Р1 можно управлять подачей на сопротивление нагрузки RН значительно большей мощности Р2.
Характеристика реле показана на рис.3.19, б. Время срабатывания маломощных реле составляет 10÷20 мс, а мощных 100÷ 200 мс.
В замкнутом положении магнитный поток Ф и, следовательно, сила притяжения якоря к сердечнику больше, чем в разомкнутом.
Этим объясняется то, что опускание реле происходит при значении тока I10 меньшем, чем Iср (рис.3.19, в). Величина I10 называется током отпускания реле. Таким образом, статическая характеристика реле является неоднозначной нелинейной зависимостью. Отношение тока отпускания к току срабатывания называется коэффициентом возврата реле:

Вместо двух пар контактов в реле может быть применена контактная группа, состоящая из нескольких пар замыкающих или размыкающих контактов.
На рис.3.20, а изображена схема поляризованного реле постоянного тока. Поток, создаваемый обмоткой W1 при определенном направлении тока I1 совпадает с потоком Ф1 и увеличивает его; при этом поток, создаваемый обмоткой W2 направлен навстречу потоку Ф2 и ослабляет его. В этом случае сила притяжения якоря к левому полюсу сердечника больше, чем сила притяжения к правому; якорь, притягиваясь влево, замыкает контакты К и K1. Если ток меняет свое направление, то поток Ф2 становится больше, чем Ф1 и замыкаются контакты К и К2. Имеются трехпозиционные поляризованные реле, в которых при I1 =0 контакт К находится в среднем, нейтральном, положении (рис.3.20, б). Поляризованные реле обладают высокой чувствительностью и быстродействием. Мощность срабатывания у этих реле равна 10-4÷10-5 Вт. Время срабатывания составляет 1÷5 мс.
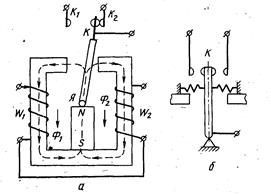
Рис.3.20. Простая (а) трехпозиционная (б) схемы поляризованного реле
Поляризованные реле могут иметь от одной до шести независимых обмоток. Входные мощности Р1 маломощных реле достигают десятых и даже сотых долей милливатта. Для наиболее мощных реле - так называемых контакторов - выходная мощность Р2 достигает десятков, а иногда и сотен киловатт. Отношение ky = P2 / P1 называется коэффициентом усиления реле.
Для расчета электромагнитного реле необходимо знать его тяговую и механическую характеристику. Тяговой характеристикой реле называется зависимость усилия, действующего на якорь реле, от силы тока (или ампервитков) и перемещения якоря. Механической характеристикой реле - зависимость создаваемого пружиной противодействующего усилия от перемещения якоря. К недостаткам реле следует отнести наличие контактов, которые подвержены действию эрозии, коррозии, пыли, а также могут обгорать.
Под электронным реле понимают устройство, состоящее из электронного усилителя и электромагнитного реле или другого исполнительного элемента с релейной характеристикой. К основным достоинствам электронных реле относятся: высокая чувствительность, безынерционность и очень малое потребление энергии.
Фотоэлектронное реле в качестве чувствительного элемента имеет фотоэлемент, осуществляющий включение или выключение исполнительной цепи в зависимости от освещенности. При попадании на фотоэлемент светового потока через него начинает течь ток, который меняет напряжение смещения на сетке лампы или эмиттере транзистора, что приводит к срабатыванию реле.
Существуют также бесконтактные электронные реле, которые представляют собой устройства на электронных лампах или транзисторах, обладающие релейной характеристикой, т.е. имеющие скачкообразное изменение выходной величины при достижении входной величиной некоторого определенного значения.
Дата добавления: 2020-10-25; просмотров: 1014;
Поиск по сайту
Узнать еще
- Асинхронные исполнительные двигатели
- АСИНХРОННЫЕ ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ
- Винтовые механизмы.
- Вопрос № 3. Магнитоэлектрические механизмы.
- Вопрос № 5. Электродинамические механизмы.
- Вопрос № 6. Электростатические механизмы.
- Исполнительные и передаточные элементы привода ПР
- Исполнительные логические элементы системы «ТРАНСЛОГ- 1»

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
