Программируемый интерфейс
Почему параллельный программируемый интерфейс назван программируемым?
1. Он работает по программе.
2. Он может быть настроен на нужный режим работы путем записи данных в регистр управления.
Ответ
1. Неправильно.
2. Правильно.
Свойства ОЗУ
Какой тип ОЗУ отличается большей компактностью?
· Статическое ОЗУ.
· Динамическое ОЗУ.
Ответ
Динамическое ОЗУ.
Раздел 2. Проектирование микропроцессорных систем
Этапы проектирования микропроцессорной системы управления
Микропроцессорная система управления является разновидностью системы автоматического управления.
Проектирование любой системы автоматического управления (САУ) состоит из нескольких этапов:
1. Составление математической модели САУ.
2. Анализ математической модели методами ТАУ: определение характера переходного процесса, оценка точности и устойчивости и т.п.
3. Синтез корректирующих устройств (в случае МПСУ — алгоритмов управления) в соответствии с требованиями, предъявляемыми к системе.
4. Моделирование синтезированной (скорректированной) системы и анализ ее параметров.
5. Реализация корректирующие устройства.
Следовательно, прежде всего, необходимо уметь составлять математическую модель микропроцессорной системы управления.
Математическая модель микропроцессорной системы управления
Система автоматического управления, блок управления которой выполнен в виде микропроцессорной системы, является дискретной САУ. Из курса ТАУ известно, что математическая модель дискретной САУ выглядит следующим образом (рис. 1):

|
Рис.1.
Однако корректное использование математической модели цифровой системы невозможно, если неизвестно точное соответствие частей модели структурным единицам и блокам МПС. Обобщенная структурная схема МПС представлена на рис. 2.
|
Рис.2.
На первый взгляд, соответствие структурной схемы (рис. 2) и математической модели (рис. 1) не просматривается. Попробуем его найти.
Рассмотрим частный случай цифровой САУ — цифровой электропривод (рис. 3):
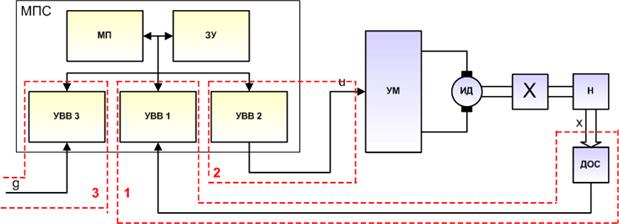
|
Рис. 3.
Как видно, САУ состоит из микропроцессорной системы (микропроцессор, запоминающее устройство и 3-х УВВ) и непрерывной неизменяемой части (усилитель мощности, исполнительный двигатель, редуктор, нагрузка и датчик обратной связи). Выделим в этой системе четыре элемента:
1. Канал обратной связи (УВВ 1, ДОС и линии связи);
2. Канал управляющих сигналов (УВВ 2 и линии связи);
3. Канал входных сигналов (УВВ 3 и линии связи);
4. Цифровой фильтр (микропроцессор и запоминающее устройство).
Таким образом, МПСУ состоит из цифрового фильтра, трех каналов связи и непрерывной неизменяемой части.
Почему микропроцессор и запоминающее устройство названы цифровым фильтром? В технике принято называть фильтром любое устройство, если при прохождении через него синусоидального сигнала амплитуда этого сигнала меняется. Любое корректирующее устройство представляет собой фильтр. В запоминающем устройстве хранится программа, реализующая алгоритм управления, а следовательно – осуществляющая фильтрацию сигналов, проходящих черезМПС. Эта фильтрация называется цифровой, поскольку микропроцессор выполняет команды за конечное время и работает с дискретными величинами. Имеет место квантование по времени и по уровню. Следовательно, микропроцессор работает как цифровой фильтр.
Рассмотрим более подробно структуру трех перечисленных каналов связи и попытаемся получить их математическое описание.
Дата добавления: 2019-02-08; просмотров: 819;
Поиск по сайту
Узнать еще
- Class имя_класса : имя_интерфейса
- I2C (Inter-Integrated Circuit) или двухпроводный интерфейс
- Архитектура БИС программируемого адаптера параллельного интерфейса КР580ВВ55.
- Внешние интерфейсы.
- Внутренние интерфейсы, расположенные в корпусе ПК
- Гибкость интерфейса
- Глава 10. Интерфейсная система ПК
- Графический интерфейс

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
