Динамика поступательного и вращательного движений
Кинематика поступательного и вращательного движений
Материальной точки
Механическим движением тел называют изменение их положения (или положения их частей) в пространстве с течением времени. В основе классической механики лежат законы Ньютона.
Кинематика изучает механическое движение с геометрической точки зрения и не рассматривает причины, вызывающие это движение. В механике рассматривается движение таких объектов, как материальная точка и абсолютно твердое тело.
Материальной точкой называется тело, размерами которого в данных условиях можно пренебречь.
Абсолютно твёрдым телом называется тело, деформацией которого в данных условиях можно пренебречь. Абсолютно твёрдое тело можно рассматривать как систему материальных точек, жестко связанных между собой.
1.1. Кинематические характеристики движения материальной точки
Описать движение материальной точки – значит знать ее положение относительно выбранной системы отсчета в любой момент времени. Системойотсчёта называется система координат, связанная с телом отсчёта и снабжённая синхронизированными часами. Наиболее часто используется прямоугольная декартова система координат (рис. 1).
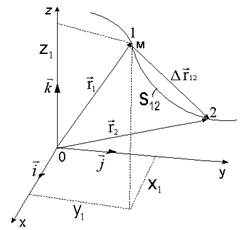
| Положение материальной точки характеризуется радиусом-вектором  , проведённым из начала координат в данную точку (рис. 1). Проекции радиуса-вектора на координатные оси соответствуют координатам точки в выбранной системе координат (рис. 1): , проведённым из начала координат в данную точку (рис. 1). Проекции радиуса-вектора на координатные оси соответствуют координатам точки в выбранной системе координат (рис. 1):
 .
Движение материальной точки задано, если известна зависимость координат точки от времени, т.е. .
Движение материальной точки задано, если известна зависимость координат точки от времени, т.е.
|
 или
или  .
.
Данные уравнения являются кинематическими уравнениями движения материальной точки, или законом движения точки. В процессе движения конец радиуса-вектора, связанный с точкой, описывает в пространстве кривую, называемую траекторией движения материальной точки. В зависимости от формы траектории различают прямолинейное и криволинейное движения.
Перемещением материальной точки называют вектор, проведённый из начальной точки в конечную точку траектории (рис. 1):

 .
.
Вектор  может быть выражен через приращения координат и орты соответствующих осей (единичные векторы, направленные по осям):
может быть выражен через приращения координат и орты соответствующих осей (единичные векторы, направленные по осям):
 .
.
Модуль вектора перемещения можно определить следующим образом:
 .
.
Путь материальной точки S12 - это длина траектории.
Скорость - векторная физическая величина, характеризующая быстроту изменения положения тела в пространстве, равная перемещению тела за единицу времени. Различают среднюю и мгновенную скорости.
 - средняя скорость;
- средняя скорость;
 - мгновенная скорость;
- мгновенная скорость;
 - среднее значение модуля скорости.
- среднее значение модуля скорости.
Вектор средней скорости направлен так же, как и вектор перемещения  . Вектор мгновенной скорости направлен по касательной к траектории движения так же, как вектор элементарного перемещения:
. Вектор мгновенной скорости направлен по касательной к траектории движения так же, как вектор элементарного перемещения:  . Так как
. Так как  , где dS - элементарный путь, то модуль мгновенной скорости равен производной пути по времени:
, где dS - элементарный путь, то модуль мгновенной скорости равен производной пути по времени:
 .
.
В декартовой системе координат скорость можно представить через её проекции на оси:

Модуль скорости может быть найден по следующей формуле:
 .
.
При рассмотрении движения тела относительно двух различных инерциальных систем отсчета используют классический закон сложения скоростей: скорость тела относительно неподвижной системы отсчета  равна векторной сумме скорости тела относительно движущейся системы
равна векторной сумме скорости тела относительно движущейся системы  и скорости самой движущейся системы относительно неподвижной
и скорости самой движущейся системы относительно неподвижной  :
:
 .
.
Ускорение - векторная физическая величина, характеризующая быстроту изменения скорости с течением времени, равная приращению скорости за единицу времени. Различают среднее и мгновенное ускорения.
 - среднее ускорение,
- среднее ускорение,
 - мгновенное ускорение.
- мгновенное ускорение.
Вектор ускорения может быть представлен через его проекции на координатные оси:
 ,
,
где  ,
,  ,
,  .
.
Модуль ускорения можно определить следующим образом:
 .
.
1.2. Тангенциальная и нормальная составляющие ускорения
Часто используется представление ускорения через две составляющие: тангенциальное и нормальное ускорения (рис. 2):
Рис. 2 |
 ; ;
 . .
|
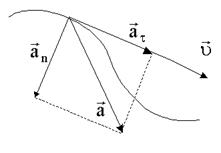
Тангенциальное ускорение характеризует изменение скорости по модулю (величине) и направлено по касательной к траектории:
 ,
,
где  - производная модуля скорости,
- производная модуля скорости,  - единичный вектор касательной, совпадающий по направлению со скоростью.
- единичный вектор касательной, совпадающий по направлению со скоростью.
Нормальное ускорение характеризует изменение скорости по направлению и направлено по радиусу кривизны к центру кривизны траектории в данной точке:
 ,
,
где R - радиус кривизны траектории,  - единичный вектор нормали.
- единичный вектор нормали.
Модуль вектора ускорения может быть найден по формуле
 .
.
1.3. Основная задача кинематики
Основная задача кинематики заключается в нахождении закона движения материальной точки. Для этого используются следующие соотношения:
 ;
;  ;
;  ;
;  ;
;
 .
.
Частные случаи прямолинейного движения:
1) равномерное прямолинейное движение:  ;
;
2) равнопеременное прямолинейное движение:  .
.
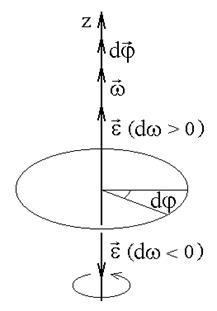
1.4. Вращательное движение и его кинематические характеристики
При вращательном движении все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения. Для характеристики вращательного движения вводятся следующие кинематические характеристики (рис. 3).
Угловое перемещение  - вектор, численно равный углу поворота тела
- вектор, численно равный углу поворота тела  за время
за время  и направленный вдоль оси вращения так, что, глядя вдоль него, поворот тела наблюдается происходящим по часовой стрелке.
и направленный вдоль оси вращения так, что, глядя вдоль него, поворот тела наблюдается происходящим по часовой стрелке.

|
Угловая скорость  - характеризует быстроту и направление вращения тела, равна производной угла поворота по времени и направлена вдоль оси вращения как угловое перемещение.
- характеризует быстроту и направление вращения тела, равна производной угла поворота по времени и направлена вдоль оси вращения как угловое перемещение.
 При вращательном движении справедливы следующие формулы:
При вращательном движении справедливы следующие формулы:
 ;
;  ;
;  .
.
Угловое ускорение  характеризует быстроту изменения угловой скорости с течением времени, равно первой производной угловой скорости и направлено вдоль оси вращения:
характеризует быстроту изменения угловой скорости с течением времени, равно первой производной угловой скорости и направлено вдоль оси вращения:
 ;
;  ;
;  .
.
Зависимость  выражает закон вращения тела.
выражает закон вращения тела.
При равномерном вращении: e = 0, w = const, j = wt.
При равнопеременном вращении: e = const,  ,
,  .
.
Рис. 3
Для характеристики равномерного вращательного движения используются период вращения и частота вращения.
Период вращения Т – время одного оборота тела, вращающегося с постоянной угловой скоростью.
Частота вращения n – количество оборотов, совершаемых телом за единицу времени.
Угловая скорость может быть выражена следующим образом:
 .
.
Связь между угловыми и линейными кинематическими характеристиками (рис. 4):
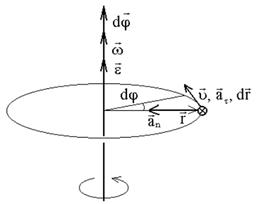
Рис. 4
Динамика поступательного и вращательного движений
Законы Ньютона
Первый закон Ньютона: всякое тело находится в состоянии покоя или равномерного прямолинейного движения, пока воздействие со стороны других тел не выведет его из этого состояния.
Тела, не подверженные внешним воздействиям, называются свободными телами. Система отсчёта, связанная со свободным телом, называется инерциальной системой отсчёта (ИСО). По отношению к ней любое свободное тело будет двигаться равномерно и прямолинейно или находиться в состоянии покоя. Из относительности движения следует, что система отсчёта, движущаяся равномерно и прямолинейно по отношению к ИСО, также является ИСО. ИСО играют важную роль во всех разделах физики. Это связано с принципом относительности Эйнштейна, согласно которому математическая форма любого физического закона должна иметь один и тот же вид во всех инерциальных системах отсчёта.
К основным понятиям, используемым в динамике поступательного движения, относятся сила, масса тела, импульс тела (системы тел).
Силой называется векторная физическая величина, являющаяся мерой механического действия одного тела на другое. Механическое действие возникает как при непосредственном контакте взаимодействующих тел (трение, реакция опоры, вес и т.д.), так и посредством силового поля, существующего в пространстве (сила тяжести, кулоновские силы и т.д.). Сила  характеризуется модулем, направлением и точкой приложения.
характеризуется модулем, направлением и точкой приложения.
Одновременное действие на тело нескольких сил  ,
,  ,...,
,...,  может быть заменено действием результирующей (равнодействующей) силы :
может быть заменено действием результирующей (равнодействующей) силы :
= + +...+ =  .
.
Массой тела называется скалярная величина, являющаяся мерой инертности тела. Под инертностью понимается свойство материальных тел сохранять свою скорость неизменной в отсутствие внешних воздействий и изменять её постепенно (т.е. с конечным ускорением) под действием силы.
Импульсом тела (материальной точки) называется векторная физическая величина, равная произведению массы тела на его скорость:  .
.
Импульс системы материальных точек равен векторной сумме импульсов точек, составляющих систему:  .
.
Второй закон Ньютона: скорость изменения импульса тела равна действующей на него силе:
 .
.
Если масса тела остается постоянной, то ускорение, приобретаемое телом относительно инерциальной системы отсчета, прямо пропорционально действующей на него силе и обратно пропорционально массе тела:
 .
.
Третий закон Ньютона: силы, с которыми действуют друг на друга взаимодействующие тела, равны по величине и противоположны по направлению:
 ,
,
где  – сила, действующая на первое тело со стороны второго,
– сила, действующая на первое тело со стороны второго,
 – сила, действующая на второе тело со стороны первого.
– сила, действующая на второе тело со стороны первого.
Из третьего закона следует, что в любой механической системе материальных точек геометрическая сумма всех внутренних сил (т.е. сил, с которыми взаимодействуют между собой материальные точки системы) равна нулю.
2.2. Динамика вращательного движения твердого тела
Вращательное действие силы характеризуется моментом силы относительно точки (рис. 5а) и относительно оси (рис. 5б).
Для того чтобы определить момент силы относительно точки О, проведем из точки О радиус-вектор  в точку приложения силы (рис. 5а). Моментом силы относительно точки О называется векторная физическая величина, равная векторному произведению радиуса-вектора на силу :
в точку приложения силы (рис. 5а). Моментом силы относительно точки О называется векторная физическая величина, равная векторному произведению радиуса-вектора на силу :

Модуль момента силы M = r×F×sina = F×d, где d = r×sina – плечо силы.
Для того чтобы определить момент силы относительно оси Z, выберем на оси Z произвольную точку, найдем момент силы относительно этой точки, а затем спроецируем на ось Z момент силы относительно точки. Таким образом, момент силы относительно оси – величина скалярная.
Разложим силу на три составляющие (рис. 5б):
 – осевая, параллельная оси вращения,
– осевая, параллельная оси вращения,
 – радиальная, перпендикулярная оси вращения,
– радиальная, перпендикулярная оси вращения,
 – касательная, перпендикулярная
– касательная, перпендикулярная  и оси вращения.
и оси вращения.
Составляющую можно определить как проекцию силы на направление вектора  , направленного по касательной к окружности радиусом R, проведенной через точку приложения силы перпендикулярно оси вращения. Направление вектора образует с осью Z правовинтовую систему.
, направленного по касательной к окружности радиусом R, проведенной через точку приложения силы перпендикулярно оси вращения. Направление вектора образует с осью Z правовинтовую систему.
Составляющие и вращения тела относительно оси Z не вызывают. Вращающее действие силы обусловлено составляющей . Можно показать, что момент силы относительно оси Z

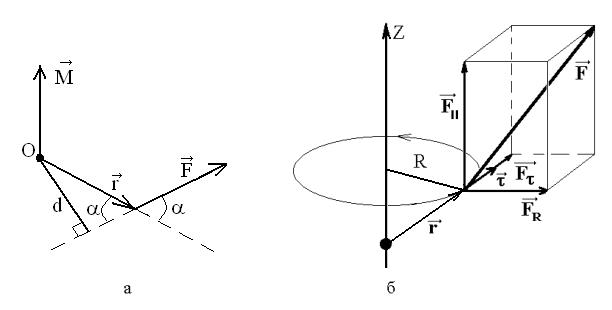
Рис. 5
Инертные свойства тела при вращательном движении характеризует момент инерции. Он зависит от распределения массы тела относительно оси вращения. Момент инерции материальной точки массой m, находящейся на расстоянии r от оси:  .
.
 – момент инерции системы материальных точек;
– момент инерции системы материальных точек;
 – момент инерции тела, где
– момент инерции тела, где  – плотность тела.
– плотность тела.
 Рис. 6
Рис. 6
| Момент инерции тела относительно произвольной оси может быть рассчитан по теореме Штейнера: момент инерции тела относительно оси O'O равен сумме момента инерции тела относительно оси, проходящей через центр инерции и параллельной O'O, и произведения массы тела на квадрат расстояния между осями (рис. 6):
 . .
|
Моментом импульса материальной точки относительно некоторой точки называется векторная величина, равная векторному произведению радиуса-вектора на импульс материальной точки (рис. 7а):
 .
.
Моментом импульса системы материальных точек называется геометрическая сумма моментов импульсов точек, составляющих систему:
 .
.
Моментом импульса материальной точки относительно оси Z называется скалярная величина, равная проекции момента импульса относительно произвольной точки, лежащей на оси Z, на эту ось. Аналогично моменту силы относительно оси, момент импульса относительно оси Z

где pt – проекция импульса на направление вектора , направленного по касательной к окружности радиусом, проведенной через материальную точку перпендикулярно оси вращения (рис. 7б). Направление вектора образует с осью Z правовинтовую систему.
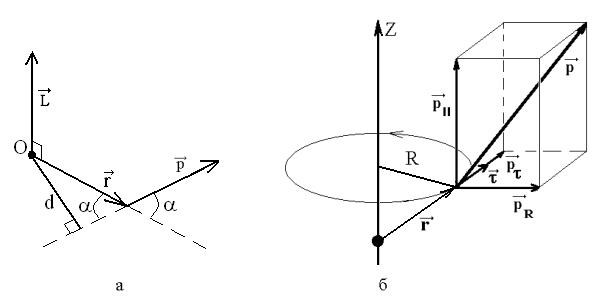
Рис. 7
Момент импульса тела относительно оси вращения
LZ = IZ×wZ,
где IZ – момент инерции тела относительно оси Z, wZ – проекция угловой скорости тела на ось Z. Для однородного тела, вращающегося относительно оси симметрии:
 .
.
Основной закон динамики вращательного движения:
Скорость изменения момента импульса тела относительно оси равна результирующему моменту внешних сил относительно этой же оси (проекция углового ускорения на ось пропорциональна результирующему моменту внешних сил относительно оси и обратно пропорциональна моменту инерции тела относительно этой же оси):
Из законов динамики поступательного и вращательного движений следует условие равновесия тел:
Дата добавления: 2016-07-22; просмотров: 4156;
Поиск по сайту
Узнать еще
- I.4.2 ОСНОВНОЙ ЗАКОН ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
- I.4.3 РАБОТА. МОЩНОСТЬ. ЭНЕРГИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
- I.7.5 РЕЛЯТИВИСТСКАЯ ДИНАМИКА
- III. Исследование движений
- Алгоритм решения задач кинематики вращательного движения НМС вокруг неподвижной оси – схема алгоритма К03 ВДТ с комментариями и примерами
- Амплитуда движений в ПДС у здорового человека
- Анализ, ошибки и оценки выполнения техники движений.
- Архитектурно-строительная аэродинамика

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
