КУЛАЧКОВЫЕ МЕХАНИЗМЫ
РЫЧАЖНЫЕ МЕХАНИЗМЫ
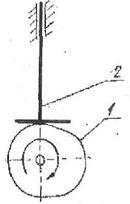
Рычажными механизмами называют механизмы, в которые входят жесткие звенья, соединенные между собой вращательными и поступательными кинематическими парами. Простейшим рычажным механизмом является двухзвенный механизм, состоящий из неподвижного звена-стойки 2 (Рис.1.1) и подвижного рычага 1, имеющего возможность вращаться вокруг неподвижной оси (обычно это начальный механизм).
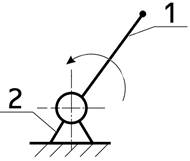
Рис.1.1Двухзвенный рычажный механизм
К двухзвенным рычажным механизмам относятся механизмы многих ротационных машин: электромоторов, лопастных турбин и вентиляторов. Механизмы всех этих машин состоят из стойки и вращающегося в неподвижных подшипниках звена (ротора).
Более сложными рычажными механизмами являются механизмы, состоящие из четырех звеньев, так называемые четырехзвенные механизмы.
На Рис.1.2 показан механизм шарнирного четырехзвенника, состоящего из трех подвижных звеньев 1, 2, 3 и одного неподвижного звена 4. Звено 1, соединенное со стойкой, может совершать полный оборот и носит название кривошипа. Такой шарнирный четырехзвенник, имеющий в своем составе один кривошип и одно коромысло называется кривошипно-коромысловым механизмом, где вращательное движение кривошипа посредством шатуна преобразуется в качательное движение коромысла. Если кривошип и шатун вытянуты в одну линию, то коромысло займет крайнее правое положение, а при наложении друг на друга – левое.
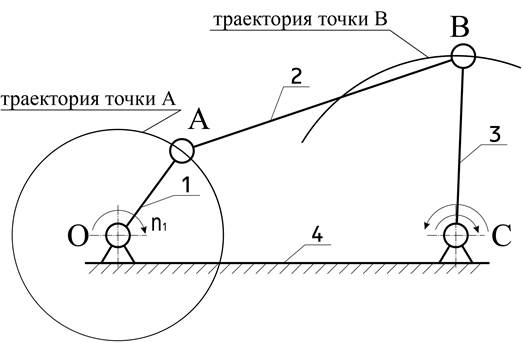
Рис. 1.2 Механизм шарнирного четырехзвенника
Примером такого механизма является механизм представленный на Рис.1.3, где звено 1 – кривошип (входное звено), звено 2 – шатун, звено 3 – коромысло. Точка MS двигаясь по кривой  описывает траекторию
описывает траекторию  . Одни траектории могут быть воспроизведены рычажными механизмами теоретически точно, другие – приближенно, с достаточной для практики степенью точности.
. Одни траектории могут быть воспроизведены рычажными механизмами теоретически точно, другие – приближенно, с достаточной для практики степенью точности.
Рассматриваемый механизм, называемый симметричным механизмом Чебышева, часто применяют в качестве кругового направляющего механизма, у которого АВ = ВС = ВМ = 1. При указанных соотношениях
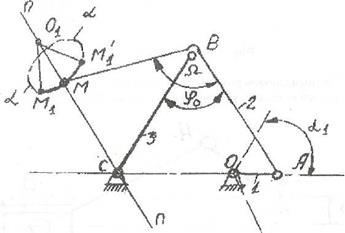
Рис. 1.3 Кривошипно-коромысловый механизм
точка М шатуна АВ описывает траекторию, симметричную относительно оси n - п. Угол наклона оси симметрии к линии центров СО определяется: ÐМСО = π – Ω / 2. Часть траектории точки М является дугой окружности радиуса О1М, что может быть использовано в механизмах с остановкой выходного звена.
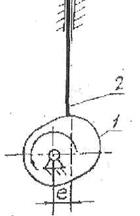
Другим примером четырехзвенника является широко распространенный в технике кривошипно-ползунный механизм (Рис. 1.4).
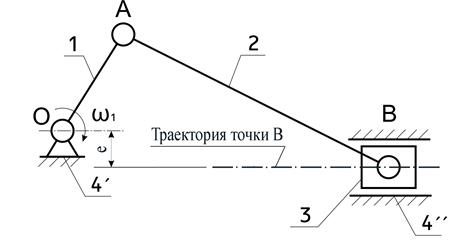
Рис. 1.4 Кривошипно-ползунный механизм
В этом механизме вместо коромысла устанавливается ползун, движущийся в неподвижной направляющей. Этот кривошипно-шатунный механизм применяют в поршневых двигателях, насосах, компрессорах и т.д. Если эксцентриситет е равен нулю, то получим центральный кривошипно-ползунный механизм или аксиальный. При е не равном нулю кривошипно-ползунный механизм называется нецентральным или дезаксиальным. Здесь вращение кривошипа ОА через шатун АВ преобразуется в возвратно-поступательное движение ползуна. Естественно крайние положения ползуна,будут при расположении кривошипа и шатуна в одну линию.
Если в рассмотренном механизме заменить неподвижную направляющую на подвижную, которая называется кулисой, то получим четырехзвенный кулисный механизм с кулисным камнем. Примером такого механизма может служить кулисный механизм строгального станка (Рис.1.5). Кривошип 1, вращаясь вокруг оси, через кулисный камень 2 заставляет кулису 3 совершать качательное движение. При этом кулисный камень относительно кулисы движется возвратно-поступательно.
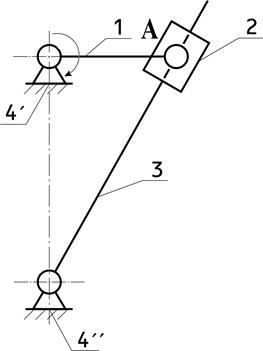
Рис. 1.5 Четырехзвенный кулисный механизм
Крайние положения кулисы будут при перпендикулярном расположении к ней кривошипа. Построить такие положения просто: изображается окружность радиусом равным длине кривошипа (траектория движения точки А), и проводятся касательные из оси вращения кулисы.
Таким образом звенья могут совершать поступательное, вращательное или сложное движения.
КУЛАЧКОВЫЕ МЕХАНИЗМЫ
Широкое распространение в технике получили кулачковые механизмы. Простейший кулачковый механизм – трехзвенный, состоящий из кулачка, толкателя и стойки. Входным звеном чаще всего бывает кулачок. Кулачковые механизмы бывают как плоскими, так и пространственными.
Плоские кулачковые механизмы для удобства рассмотрения разобьем на механизмы в зависимости от движения выходного звена на два вида:
1.Кулачковый механизм с поступательно движущимся толкателем(ползуном).
2. Кулачковый механизм с поворачивающимся толкателем (коромыслом).
Пример первого кулачкового механизма показан на Рис.2.1. Кулачок 1, вращаясь с заданной угловой скоростью, действует на ролик 3 и заставляет толкатель 2 в виде ползуна двигаться в направляющих возвратно-поступательно.
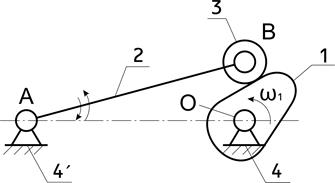
На Рис.2.2 приведена схема кулачкового механизма с поворачивающимся толкателем (коромыслом). Кулачок 1, вращаясь с заданной угловой скоростью ω1, действует на толкатель 2 и заставляет последний вращаться вокруг оси вращения А.
| 
|
| Рис.2.1 Механизм с поступательно- движущимся толкателем | Рис.2.2 Кулачковый механизм с поворачивающимся толкателем |
Кулачковые механизмы имеют разновидности в зависимости от геометрических форм элемента выходного (ведомого) звена и взаимного расположения толкателя и кулачка. Например, кулачковый механизм, показанный на Рис.2.1 может иметь разные виды ведомых звеньев (Рис.2.3).
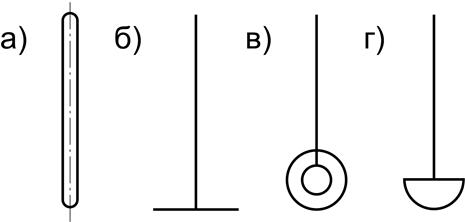
Рис.2.3 Виды ведомых звеньев, применяемые для кулачковых механизмов с поступательно движущимся выходным звеном:
а) толкатель с острием; б) с плоскостью; в) толкатель с роликом;
г) толкатель со сферическим наконечником.
Кулачковые механизмы с поступательно движущимся ведомым звеном можно разделить на:
а) кулачковые механизмы с центральным толкателем, у которых направление движения толкателя совпадает с осью вращения кулачка (Рис.2.4);
б) кулачковые механизмы со смещенным толкателем (дезаксиальные), если ось толкателя отстоит на расстояние е– дезаксиал от оси вращениякулачка (Рис.2.5).
| 
|
| Рис.2.4 Кулачковый механизм с центральным толкателем | Рис.2.5 Кулачковый механизм со смещенным толкателем |
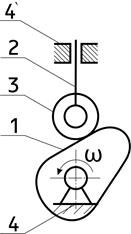
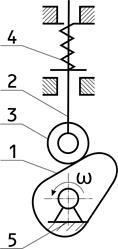
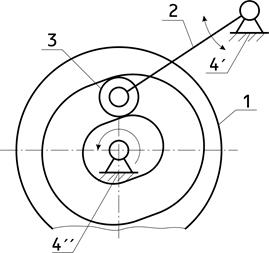
При работе кулачковых механизмов необходимо, чтобы было постоянное соприкосновение ведущего и ведомого звеньев. Это может быть обеспечено либо силовым замыканием, чаще всего с помощью пружин (Рис.2.6), либо геометрически, если выполнить профиль кулачка 1 в форме паза, боковые поверхности которого воздействуют на ролик 3 толкателя 2.
| 
|
| Рис.2.6 Кулачковый механизм с силовым замыканием | Рис.2.7 Кулачковый механизм с геометрическим замыканием |
Пазовый кулачок обеспечивает геометрическое замыкание высшей пары кулачкового механизма (Рис.2.7).
Все рассмотренные выше кулачковые механизмы плоские. Часто встречаются пространственные кулачковые механизмы, которые весьма разнообразны по конструктивному оформлению. Наиболее распространенными пространственными кулачковыми механизмами являются механизмы барабанного типа (Рис.2.8). Цилиндрический кулачок 1 с профильным пазом, обеспечивающим кинематическое замыкание высшей пары, вращается с постоянной угловой скоростью и через ролик 3 сообщает качательное движение толкателю 2, закон изменения которого зависит от очертания паза.
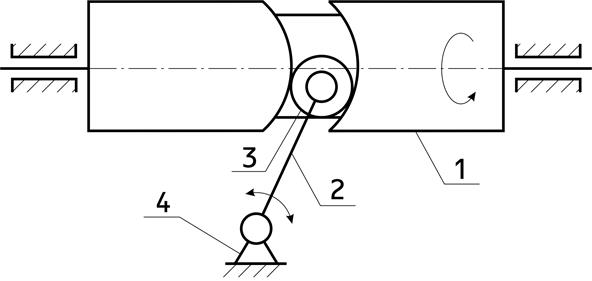
Рис.2.8 Пространственный кулачковый механизм барабанного типа
Дата добавления: 2016-07-11; просмотров: 5517;
Поиск по сайту
Узнать еще
- III. Механизмы регуляции количества ферментов
- Безусловнорефлекторные, условнорефлекторные, гуморальные механизмы регуляции половых функций.
- Биологические и социальные аспекты старения. Генетические, молекулярные, клеточные, системные механизмы старения. Проблема долголетия.
- Биофизические механизмы транспорта вещества через биомембраны.
- Виды и механизмы коррозии стальных трубопроводов. Методы защиты МН от коррозии
- Виды, механизмы и цели познавательной деятельности
- Винтовые механизмы.
- Витамины- антиоксиданты: Е, А, участие в метаболических процессах, биохимические механизмы проявления гиповитаминозов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
