ВЫБОР МОЩНОСТИ ДВИГАТЕЛЯ ПО НАГРУЗОЧНЫМ ДИАГРАММАМ
Выбор двигателя - ответственный этап проектирования электропривода. Одно из требований к двигателю - надежность его работы при минимуме капитальных затрат и эксплуатационных расходов. Это требование может быть удовлетворено только при выборе двигателя соответствующей мощности. Применение двигателя завышенной мощности приводит к повышению капитальных затрат, снижению КПД, а для асинхронных двигателей - к ухудшению коэффициента мощности. Применение двигателей заниженной мощности может привести к снижению производительности рабочей машины, возникновению аварий и сокращению гарантированного срока службы двигателя из-за повышенного его нагрева.
При выборе мощности двигателя основными исходными данными являются требуемые моменты, которые должны быть приложены к валу механизма, требуемые скорости и ускорения рабочего органа механизма. Эти требования должны быть известны из технического задания. Задача выбора мощности двигателя осложняется тем, что в общем случае момент, развиваемый двигателем, не равен моменту статической нагрузки, а их разность - динамический момент - зависит от суммарного момента инерции привода, в который входит и момент инерции двигателя. Поэтому, когда динамические режимы играют заметную роль, задача решается в два этапа:
-предварительно выбирается двигатель;
-двигатель проверяется по перегрузочной способности и по нагреву.
В частном случае, когда динамические режимы отсутствуют, выбор двигателя производится непосредственно по требуемым статическому моменту и скорости.
Рассмотрим выбор мощности двигателя для общего случая.
Исходные данные для выбора двигателя обычно представляются в виде нагрузочных диаграмм моментов рабочего механизма MРМ(t), тахограмм его скорости ωРМ(t) и момента инерции механизма JM..Моменты статической нагрузки и момент инерции, приведенные к валу двигателя, определяются выражениями:

Предположим, что нагрузочная диаграмма приведенных моментов и тахограмма механизма известны и имеют вид, изображенный на рис. 1.1 (верхние два графика).
Для предварительного выбора двигателя по известной нагрузочной диаграмме находят средний момент статической нагрузки:
 ; (1.1)
; (1.1)
где Мсi - момент статической нагрузки на i-ом интервале;
ti - продолжительность i-го интервала;
n - число интервалов.
Номинальный момент искомого двигателя:
 , (1.2)
, (1.2)
где  = 1,1…1,3 - коэффициент, учитывающий динамические режимы работы привода.
= 1,1…1,3 - коэффициент, учитывающий динамические режимы работы привода.
В качестве номинальной скорости берут  , если регулирование однозонное вниз от основной скорости, или
, если регулирование однозонное вниз от основной скорости, или  , если регулирование однозонное вверх от основной скорости. По найденный величинам МН и ωН выбирают двигатель по каталогу и определяй его момент инерции (прил.1).
, если регулирование однозонное вверх от основной скорости. По найденный величинам МН и ωН выбирают двигатель по каталогу и определяй его момент инерции (прил.1).

где GD2 – маховый момент двигателя.
 МС
МС
МС2
МС1
МС3

 t
t
t1 t2 t3 t0
tЦ



 0 t
0 t
 tn tторм
tn tторм
M
M1
МС2
МС1
МС3

 0 t
0 t
 -М2
-М2
-М3
Рис.1.1.Нагрузочные диаграммы приведенных статических моментов и тахограммы рабочего механизма и нагрузочная диаграмма моментов двигателя.
После того, как двигатель предварительно выбран, переходят к построению нагрузочной диаграммы двигателя, т.е. зависимости М(t). Это построение сводится к решению уравнения движения привода:
 ,
,
где  - суммарный момент инерции двигателя и приведенного к валу двигателя момента инерции механизма.
- суммарный момент инерции двигателя и приведенного к валу двигателя момента инерции механизма.
На рис.1.1 внизу показана нагрузочная диаграмма моментов двигателя, построенная в предположении, что при изменении скорости момент двигателя является величиной постоянной и отсутствует электрическая инерционность двигателя.
Нагрузочная диаграмма двигателя служит основой для проверки предварительно выбранного двигателя по перегрузочной способности и по нагреву.
Проверка по перегрузочной способности сводится к проверке выполнения условия
Мтах  Мдоп (1.3)
Мдоп (1.3)
где Мтах - максимальный момент из нагрузочной диаграммы двигателя;
Мдоп - допустимый по перегрузке момент двигателя.
Для двигателя постоянного тока нормального исполнения
Мдоп =(2…2,5) Мн; (в скобках указан коэффициент допустимой механической перегрузки  для асинхронного двигателя с учетом возможного снижения напряжения питания на 10 %
для асинхронного двигателя с учетом возможного снижения напряжения питания на 10 %
Мдоп = 0,8 Мкр;
для синхронного двигателя нормального исполнения
Мдоп =(2…2,5) Мн.
Асинхронные короткозамкнутые двигатели дополнительно проверяются по пусковому моменту. Для нормального пуска должно выполняться условие
Мс max < MП ,
где Мс max - максимальный момент статической нагрузки, при котором должен выполняться пуск привода;
Мкр - критический момент асинхронного двигателя;
МП - пусковой момент двигателя;
Мн - номинальный момент двигателя.
Проверка по нагреву, сводящаяся к оценке фактической температуры изоляции обмоток двигателя и сравнению ее с допустимой, также выполняется с использованием нагрузочных диаграмм двигателя.
В этом случае целесообразно воспользоваться методами эквивалёнтных величин [I]и, в частности, методом эквивалентного момента, если магнитный поток двигателя постоянен в течение всего цикла работы.
Эквивалентный момент для ступенчатой нагрузочной диаграммы вычисляется по формуле
 . (1.4)
. (1.4)
Величина эквивалентного момента сопоставляется с номинальным моментом, и если
МЭКВ ≤ МН, двигатель удовлетворяет требованиям допустимого нагрева.
Если выбранный двигатель удовлетворяет условиям перегрузочной способности и допустимого нагрева, то на этом его выбор заканчивается. Если же выбранный двигатель не удовлетворяет указанным условиям, то выбирается другой двигатель (как правило большей мощности) и проверка повторяется.
2. ПРЕОБРАЗОВАТЕЛИ ДЛЯ АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА
Преобразовательное устройство, являющееся одним из важнейших звеньев автоматизированного электропривода, служит для преобразования и усиления сигнала управления до величины, достаточной для управления двигателем. В качестве силовых преобразователей могут служить генераторы, электромашинные усилители, магнитные усилители, тиристорные преобразователи, для маломощных приводов - транзисторные усилители.
В недалеком прошлом в качестве силовых преобразователей использовались электромашинные устройства, но с развитием электроники они постепенно уступили место тиристорным преобразователям. Однако электромашинные преобразовательные устройства имеют единственное преимущество - высокий коэффициент мощности, которое позволяет использовать их в мощных электроприводах.
2.1. Выбор электромеханических силовых преобразователей
При выборе электромеханических преобразователей необходимо, чтобы напряжение преобразователя соответствовало номинальному напряжению двигателя, а отношение номинальных токов преобразователя IГНи двигателя IДН удовлетворяло условию
 ≥ 1.
≥ 1.
При этом чем выше требование к быстродействию электропривода, тем больше должно быть указанное отношение.
2.2 Выбор тиристорных силовых преобразователей
В настоящее время промышленностью выпускаются комплектные тиристорные устройства, и выбор их осуществляется аналогично выбору электромеханических силовых преобразователей. Однако часто возникает необходимость проектирования нестандартного тиристорного электропривода, что связано с расчетом и выбором силового трансформатора, выбором типа вентилей, расчетом необходимой индуктивности ограничивающих реакторов. Кроме того, при расчете динамических режимов необходимо знать параметры силового трансформатора, т.к. он входит в основную цепь электропривода.
2.2.1. Расчет параметров силового трансформатора
Теоретическое значение фазного напряжения вторичной обмотки трансформатора, питающего т - фазный управляемый выпрямитель, определяется выражением [2]
 , (2.1)
, (2.1)
где Ксх - коэффициент схемы (табл.1);
Udo - среднее значение выпрямленного напряжения при α=0(принимается равным номинальному напряжению двигателя).
Требуемое значение фазного напряжения U2Ф с учетом необходимого запаса
U2Ф = KU KR U /2Ф , (2.2)
где KU = 1,1 - коэффициент запаса по напряжению, учитывающий возможное снижение напряжения сети на 10 %;
KR =1,05 - коэффициент запаса, учитывающий падение напряжения в вентилях, обмотках трансформатора и за счет перекрытия токов.
Требуемое линейное напряжение вторичной обмотки
 .
.
Действующее значение тока вторичной обмотки трансформатора
I2 = KT 2 Ki Id , (2.3)
где Ki = 1,05...1,1 - коэффициент, учитывающий отношение формы анодного тока вентилей от прямоугольной;
KT 2 - коэффициент схемы (табл.1).
Действующее значение тока первичной обмотки
 , (2.4)
, (2.4)
где KT1 - коэффициент схемы (табл.1);
KTР - коэффициент трансформации.
Расчетная типовая мощность силового трансформатора с учетом необходимого запаса
 (2.5)
(2.5)
где KM - коэффициент повышения расчетной мощности трансформатора, зависящий от схемы выпрямления (табл.1);
 - мощность выпрямленного тока, Вт.
- мощность выпрямленного тока, Вт.
По требуемой мощности и напряжению выбирают трансформатор с мощностью  , линейным напряжением
, линейным напряжением  и схемой соединения обмоток - «Звезда – Звезда»
и схемой соединения обмоток - «Звезда – Звезда»
2.2.2. Выбор вентилей
Вентили выбираются по среднему значению выпрямленного тока с учетом возможной перегрузки двигателя и по максимальному значению обратного движения. Максимальное значение выпрямленного тока Im = (2,2…2,5) IЯН.
Среднее значение тока через вентиль
 , (2.6)
, (2.6)
где m / - коэффициент, зависящий от схемы (табл.1).
Расчетная максимальная величина обратного напряжения, прикладываемого к вентилю
 (2.7)
(2.7)
где КВТ -коэффициент, определяемый по табл.1;
 - действительная величина среднего значения выпрямленного напряжения при α=0 и питании выпрямителя от выбранного трансформатора.
- действительная величина среднего значения выпрямленного напряжения при α=0 и питании выпрямителя от выбранного трансформатора.
Максимальная величина обратного напряжения с учетом необходимого запаса
Uоб.т. = (1,3…1,5) U /об.т.
По параметрам IВСР и Uоб.т выбирают вентили [З].
Необходимо помнить, что вентили могут пропустить ток, указанный в паспортных данных, только при условии идеального охлаждения. Для охлаждения вентилей применяют типовые охладители из алюминиевых сплавов [4]. Так, например, семиреберный охладитель из алюминиевого сплава с естественным воздушным охлаждением позволяет загружать вентили током, не превышающим 40 % от тока, указанного в паспорте (прил. 2).
2.2.3. Определение расчетных параметров якорной цепи.
Под расчетными параметрами якорной цепи понимаются ее суммарная индуктивность и суммарное активное сопротивление.
Суммарная индуктивность якорной цепи складывается из индуктивности обмотки якоря двигателя Lд и индуктивности фазы трансформатора, приведенной к цепи выпрямленного тока LТ: 
Индуктивность якоря двигателя
 , (2.8)
, (2.8)
где β - коэффициент, учитывающий степень компенсации электрической машины;
β = 0,6 - для нескомпенсированной машины;
β = 0,25 - для скомпенсированной машины;
Рд - число пар полюсов;
 = 0,105 nH рад/с.
= 0,105 nH рад/с.
Индуктивность фазы трансформатора, приведенная к цепи выпрямленного тока,
 , (2.9)
, (2.9)
где XT - индуктивное сопротивление трансформатора, которое определяется по формуле
 , (2.10)
, (2.10)
где UL - индуктивная составляющая напряжения короткого замыкания трансформатора в относительных единицах (ориентировочно UL = 0,095),
I2 - действующее значение тока вторичной обмотки трансформатора.
При питании двигателя от тиристорного преобразователя в якорной цепи может иметь место прерывистый ток, при котором увеличиваются потери в двигателе и механические характеристики привода становятся мягкими. Для уменьшения области прерывистых токов индуктивность якорной цепи необходимо увеличить.
Требуемая суммарная величина индуктивности якорной цепи, обеспечивающая непрерывность тока,
 , (2.11)
, (2.11)
где ω=2πƒ - угловая частота;
m - число фаз выпрямления;
Imin - минимальное значение непрерывного тока двигателя (ориентировочно Imin=0,1IЯН).
Действующее значение переменой составляющей выпрямленного напряжения находят по данным табл.1:
 . (2.12)
. (2.12)
Сравнивая суммарную индуктивность якорной цепи с величиной требуемой индуктивности, приходят к выводу о целесообразности установки в якорную цепь сглаживающего дросселя с индуктивностью
 . (2.13)
. (2.13)
Суммарное активное сопротивление якорной цепи
 ,
,
где Rд и RП - активное сопротивление двигателя и преобразователя.
Активное сопротивление двигателя
 , (2.14)
, (2.14)
где α =1,2…1,4 - коэффициент, учитывающий увеличение сопротивления обмоток при нагревании;
 - сопротивление щеток.
- сопротивление щеток.
Активное сопротивление преобразователя
 , (2.15)
, (2.15)
где RT - активное сопротивление обмотки трансформатора, которое определяется по формуле
 , (2.16)
, (2.16)
Ua = 0,02…0,03 - активная составляющая напряжения короткого замыкания трансформатора;
RК - коммутационное сопротивление, которое определяют по выражению
 , (2.17)
, (2.17)
где m - параметр схемы (табл.1).
При определении сопротивления преобразователя необходимо учитывать схему управляемого выпрямителя. Так, в мостовой трехфазной схеме одновременно работают два вентиля, поэтому
 .
.
3. СТАТИЧЕСКИЙ РАСЧЕТ АВТОМАТИЗИРОВАННЫХ ЭЛЕКТРОПРИВОДОВ
Статический расчет сводится к составлению блок-схемы электропривода и выбору основных элементов системы, которые должны обеспечивать регулирование выходных координат (скорости, момента) с требуемой точностью и в требуемом диапазоне регулирования. Без применения обратных связей нельзя обеспечить современные требования по точности регулирования. Поэтому для регулирования выходных координат электропривода используют обратные связи по скорости, напряжению и току, а также их различные комбинации. Так, например, для стабилизации скорости двигателя применяют отрицательные обратные связи по скорости или напряжению и положительную (слабую) связь по току. Для стабилизации момента двигателя применяется отрицательная связь по току (моменту) и положительные связи по скорости или напряжению.
При регулировании двух или нескольких координат электропривода обычно используют схемы с общим усилителем и схемы с общим усилителем и нелинейными обратными связями.
Ниже приведены уравнения, позволяющие построить электромеханические характеристики электропривода, и формулы для вычисления требуемого коэффициента усиления усилителя, обеспечивающего заданную точность и диапазон регулирования при различных видах обратных связей.
3.1. Системы стабилизации скорости электропривода постоянного тока с усилителем
В электроприводах постоянного тока получила распространение статическая система стабилизации скорости двигателя постоянного тока при изменении нагрузки на его валу, обеспечивая регулирование скорости и ее стабилизацию с высокой точностью.
В общем случае функциональная схема такой системы имеет вид, показанный на рис.3.1. Она содержит двигатель М, преобразователь U, промежуточный усилитель А, элемент сравнения AW (сумматор) и обратную связь, в которую могут входить датчик тока UA, датчик напряжения UU, датчик скорости (частота вращения ) BR или различные комбинации из этих датчиков.
Работа электропривода в установившихся режимах при постоянном магнитном потоке двигателя описывается системой уравнений [5]:
Рис.3.1. Функциональная схема электропривод постоянного тока
 , (3.1.), где UЗ, UOC, UУ, UУП, UД – напряжение: задающее, обратной связи, управления системы, управления преобразователем, на двигателе;
, (3.1.), где UЗ, UOC, UУ, UУП, UД – напряжение: задающее, обратной связи, управления системы, управления преобразователем, на двигателе;
EП – ЭДС преобразователя; w – угловая скорость вращения двигателя; I – ток двигателя; КУ, КП – коэффициенты усиления промежуточного усилителя и преобразователя; RП, RД, RЦ – сопротивления: преобразователя, двигателя и цепи, соединяющей двигатель с преобразователем; К, Ф – конструктивная постоянная и магнитный поток двигателя.
Напряжение обратной связи UОС в зависимости от вида применяемой обратной связи определяется зависимостями:
UОС=КСw;
UОС=КНUД;
UОС=КТI
или их комбинация, где КС, КН, КТ – коэффициенты обратных связей по скорости, напряжению и току.
3.1.1. Система стабилизации скорости с обратной связью по скорости и положительной обратной связью по току.
Для рассматриваемого случая уравнение для UУ в системе уравнений (3.1) необходимо записать в виде
UУ=UЗ-КСw+КТI
Решая систему уравнений (3.1) относительно угловой скорости вращения w, получим:
 (3.2)
(3.2)
где  - полное сопротивление силовой цепи электропривода;
- полное сопротивление силовой цепи электропривода;
 - статический коэффициент передачи двигателя.
- статический коэффициент передачи двигателя.
Уравнения электромеханической характеристики системы с каждой из обратных связей можно получить из общего уравнения, приравнивая к нулю коэффициенты отсутствующих связей.
Второе слагаемое в уравнении (3.2) является перепадом угловой скорости под действием нагрузки и характеризует уровень ошибки стабилизации скорости в замкнутой системе:
 (3.3)
(3.3)
где  - ошибка разомкнутой системы (без обратных связей).
- ошибка разомкнутой системы (без обратных связей).
Ошибка в замкнутой системе электропривода зависит от значений коэффициентов обратных связей и коэффициентов усиления преобразователя и усилителя тем меньше, чем больше значения указанных коэффициентов.
Коэффициенты обратных связей определяются возможностями датчиков и верхним уровнем задающего напряжения. Коэффициент усиления преобразователя зависит от свойств преобразователя и при выбранном преобразователе бывает известным. Коэффициент усиления усилителя определяется по требуемой точности (статизму) системы.
Для рассматриваемого случая требуемый коэффициент усиления определяется из уравнения (3.3)
 ,
,
где  - допустимая ошибка замкнутой системы.
- допустимая ошибка замкнутой системы.
В требованиях к электроприводам обычно задается статизм по отношению к скорости идеального холостого хода, т.е. ошибка в относительных единицах или процентах,  , и диапазон регулирования скорости D, который определяется как отношение максимальной и минимальной скорости идеального холостого хода:
, и диапазон регулирования скорости D, который определяется как отношение максимальной и минимальной скорости идеального холостого хода:
 или
или 

Требуемый коэффициент усиления усилителя
 (3.4)
(3.4)
где  - статизм разомкнутой системы по отношению к максимальной скорости идеального холостого хода;
- статизм разомкнутой системы по отношению к максимальной скорости идеального холостого хода;
 - заданный статизм (требуемая точность регулирования)
- заданный статизм (требуемая точность регулирования)
Регулирование скорости двигателя в заданном диапазоне осуществляется изменением задающего сигнала UЗ. Значения UЗ зависят от коэффициентов обратных связей и коэффициентов усиления преобразователя и усилителя. Определяется UЗ обычно из уравнения электромеханической характеристики (3.2) при идеальном холостом ходе двигателя (первое слагаемое). Уравнение UЗ при действии отрицательной обратной связи по скорости и положительной по току имеет вид:
 (3.5)
(3.5)
Из комбинированных связей распространение получили комбинации отрицательной связи по скорости и положительной по току (рассмотренный случай) и отрицательной связи по напряжению и положительной по току. При этом связь по напряжению (или скорости) делается сильной, а связь по току – слабой. Поэтому на верхних скоростях диапазона, где статизм небольшой, действие токовой связи слабое, а на нижних скоростях, когда напряжение на якоре двигателя снижено, основную роль играет связь по току, которая и повышает точность регулирования.
В техническом задании на проектирование автоматизированного электропривода иногда задается требуемая точность регулирования, а не требуемый статизм. В этом случае ошибка замкнутой системы на нижнем пределе диапазона регулирования должна быть меньше или равна требуемой ошибке регулирования.
Ошибка электропривода  определяется ошибкой от действия нагрузки (статизма)
определяется ошибкой от действия нагрузки (статизма)  и ошибкой датчика обратной связи
и ошибкой датчика обратной связи  , т.е.
, т.е.
 ,
,
отсюда
 , где - требуемый статизм.
, где - требуемый статизм.
Обычно 
3.1.2. Система стабилизации скорости с отрицательной обратной связью по напряжению и положительной по току
При данном виде обратной связи уравнение для  в системе уравнений (3.1) необходимо записать в виде
в системе уравнений (3.1) необходимо записать в виде

Решая систему уравнений (3.1) относительно угловой скорости вращения  , получим
, получим
 . (3.6)
. (3.6)
Уровень стабилизации скорости в замкнутой системе с отрицательной обратной связью по напряжению и положительной по току как ошибка  определяется вторым слагаемым в выражении (3.6)
определяется вторым слагаемым в выражении (3.6)
 (3.7)
(3.7)
Требуемый коэффициент усиления усилителя через заданную ошибку  определяется выражением
определяется выражением
и через требуемый статизм и диапазон регулировки
 (3.8)
(3.8)
Задающий сигнал UЗ
 (3.9)
(3.9)
Комбинация связей по напряжению и току получила распространение в виде обратной связи по ЭДС двигателя, когда  (см.(3.6)). Датчиком
(см.(3.6)). Датчиком
противо-ЭДС двигателя является уравновешенный тахометрический мост, у которого R1R3=R2RД (рис.3.2).
Рис.3.2. Функциональная схема электропривода с отрицательной обратной связью по ЭДС двигателя
Напряжение обратной связи по ЭДС (см.3.3.3)
Уравнение электромеханической характеристики
Требуемый коэффициент усиления усилителя
 (3.10)
(3.10)
Обратная связь по ЭДС двигателя обеспечивает стабилизацию его скорости с точностью более низкой, чем обратная связь по скорости, осуществляемая с помощью тахогенератора. Используется такая связь при невозможности или нежелательности установки тахогенератора, например, когда выбранный двигатель соизмерим по мощности с тахогенератором.
3.2. Системы стабилизации скорости электропривода постоянного тока с ограничением тока (момент)
При резком изменении задающего напряжения в замкнутых системах электропривода сигнал управления в первый момент времени значительно превышает свое установившееся значение. Это приводит к увеличению напряжения на выходе преобразователя, что в свою очередь может привести к возрастанию тока якоря двигателя до недопустимых значений. Следовательно, требуется введение ограничения тока (момента) двигателя.
Ограничение тока двигателя в рассматриваемых системах электропривода осуществляется с помощью отрицательной обратно связи по току, которая включается при достижении током якоря своего предельного значения. Отрицательная обратная связь по току снижает напряжение на выходе преобразователя и таким образом ограничивает увеличение тока якоря двигателя. Эта связь называется задержанной обратной связью или отсечкой по току.
Ограничение тока двигателя необходимо в приводах механизмов, работающих с резко переменной нагрузкой или на упор (например, в экскаваторах).
Задержанная обратная связь осуществляется введением в цепь обратной связи нелинейного элемента, статическая характеристика которого изображена внутри прямоугольника, обозначающего датчик обратной связи на рис.3.3, где UТО – напряжение токовой отсечки, пропорциональное току якоря; IОТС – ток отсечки, при котором начинается ограничение тока (ток отсечки).
Напряжение UТО отрицательной обратной связи по току
Уравнение электромеханической характеристики в системах с задержанной обратной связью по току и при отсутствии других обратных связей имеет следующий вид:
при I < IОТС 
при I ≥ IОТС 
Уравнение электромеханической характеристики в системах с задержанной обратной связью по току и с отрицательными обратными связями по скорости и напряжению имеет вид:
при I < IОТС  (3.11)
(3.11)
при I ≥ IОТС  (3.12)
(3.12)
Электромеханическая характеристика электропривода с задержанной обратной связью по току имеет два участка (рис.3.4.): первый – участок стабилизации скорости (при I < IОТС); второй – участок ограничения тока (момента) (при I ≥ IОТС).
Реализация нелинейной характеристики обратной связи (рис.3.3) осуществляется с помощью опорного напряжения и диода (рис.3.5.а) или стабилитрона (рис.3.5.б).
Изменение величины тока отсечки IОТС можно осуществить путем изменения опорного напряжения UОП.
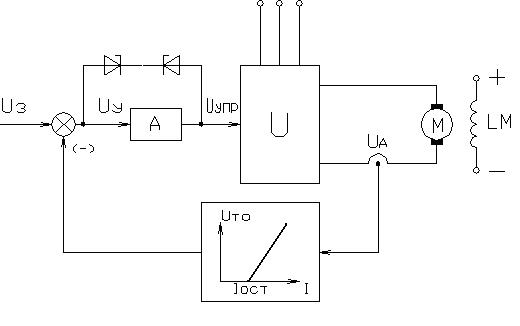
Рис.3.3. Функциональная схема электропривода с задержанной обратной связью по току.
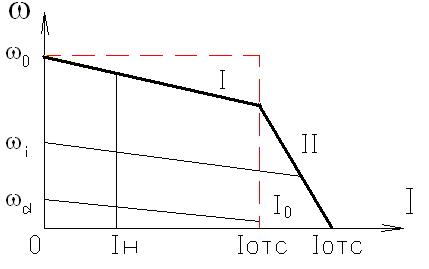
Рис.3.4. Электромеханическая характеристика электропривода с задержанной обратной связью по току.
Рис.3.5. узлы задержанных обратных связей по току: а) с использованием опорного напряжения и диода; б) с использованием стабилитрона
Ограничение тока в электроприводе постоянного тока можно получить путем использования нелинейных характеристик типа “насыщение” промежуточных усилителей.
Функциональная схема такой системы приведена на рис.3.6. Статическая характеристика усилителя А1 изображена внутри прямоугольника, обозначающего усилитель А1.
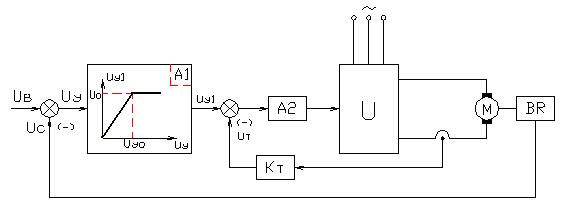
Рис.3.6. Функциональная схема электропривода с ограничением тока за счет нелинейной характеристики усилителя А1.
В установившихся режимах, когда усилитель А1 работает на линейном участке характеристики, уравнение электромеханической характеристики имеет вид:
 (3.13)
(3.13)
где КУ1, КУ2 – коэффициенты усиления усилителя А1 и А2;.
КТ – коэффициент передачи отрицательной обратной связи по току.
При повышении нагрузки до IОТС и снижении скорости (UC уменьшается, UУ - увеличивается) усилитель А1 насыщается и дальнейшее действие обратной связи по скорости исключается. В этом случае остается отрицательная связь по току, которая и ограничивает ток, уменьшая разность UУ1 – UT на выходе усилителя, а следовательно, и ЭДС преобразователя.
Уравнение электромеханической характеристики при этом имеет вид:
 (3.14)
(3.14)
где UОГР – напряжение ограничения на выходе усилителя А1, которое является задающим напряжением для внутреннего токового контура.
Токовый контур является системой стабилизации тока. Уравнение тока можно получить из (3.14):
 (3.15)
(3.15)
Первое слагаемое уравнение является током стопорения IСТ, а второе – отклонение тока от IСТ под действием угловой скорости вращения, которая в токовом контуре является возмущающим воздействием.
Уровень стабилизации тока определяется коэффициентом отрицательной обратной связи по току, значение которого можно получить из первого слагаемого уравнения тока:
 (3.16)
(3.16)
Так как второе слагаемое в уравнении для КТ величина небольшая (за счет малого  и большого КУ2КП), то величина коэффициента обратной связи по току КТ определяется величиной UОГР и требуемым током стабилизации.
и большого КУ2КП), то величина коэффициента обратной связи по току КТ определяется величиной UОГР и требуемым током стабилизации.
3.3. Определение параметров и коэффициентов передачи элементов электропривода
После выбора основных элементов электропривода и составления блок-схемы необходимо определить их параметры как в статическом, так и в динамическом режимах работы. К этим параметрам относятся: коэффициенты усиления (передачи), постоянные времени всех цепей, передаточные функции элементов. В общем случае часть параметров определяют расчетным путем, часть получают экспериментально, некоторые берут из справочных материалов.
3.3.1. Двигатель постоянного тока независимого возбуждения
Передаточная функция двигателя постоянного тока независимого возбуждения по управляющему воздействию имеет вид:
 (3.17)
(3.17)
где  - изображение угловой скорости вращения вала двигателя;
- изображение угловой скорости вращения вала двигателя;
ЕП(Р) – изображение ЭДС преобразователя.
Параметры передаточной функции (3.17) определяется следующим образом:
1.  - статический коэффициент передачи двигателя.
- статический коэффициент передачи двигателя.
Значение СН=к•ФН, соответствующее номинальному значению тока возбуждения, а следовательно и потока, определяется по паспортным данным двигателя:
где  - номинальная угловая скорость двигателя,
- номинальная угловая скорость двигателя,  ;
;
к – конструктивная постоянная машины.
2.  - электромагнитная постоянная времени якорной цепи преобразователь-двигатель, С
- электромагнитная постоянная времени якорной цепи преобразователь-двигатель, С
3.  - электромеханическая постоянная времени двигателя, С
- электромеханическая постоянная времени двигателя, С
Суммарный момент инерции состоит из момента инерции двигателя  и приведенного к валу двигателя момента инерции механизма
и приведенного к валу двигателя момента инерции механизма  .
.
Момент инерции двигателя определяется по паспортным данным двигателя, через маховый момент двигателя GD2, кг•с•м2.

Момент инерции механизма, приведенный к валу двигателя, зависит от махового момента механизма  и передаточного отношения редуктора
и передаточного отношения редуктора  :
:

Если используется понижающий редуктор с большим передаточным числом, то для ориентировочных расчетов можно принять

3.3.2. Силовые преобразователи.
Как отмечалось выше, в электроприводах постоянного тока в настоящее время в качестве силовых преобразователей используются электромашинные (генератор постоянного тока) и тиристорные преобразователи.
1. Генератор постоянного тока.
Передаточная функция генератора постоянного тока имеет вид
 ,
,
где ЕГ(Р) – изображение ЭДС генератора;
UВ(Р) – изображение напряжение возбуждения.
Статический коэффициент передачи генератора определяется отношением приращением ЭДС генератора к соответствующему приращению напряжения на обмотке возбуждения:

Для нахождения коэффициента передачи пользуются характеристикой холостого хода генератора  , где IwВ – МДС возбуждения генератора.
, где IwВ – МДС возбуждения генератора.
В этом случае:
 ,
,
где wВ и RВ –число витков и сопротивление обмотки возбуждения.
Так как характеристика холостого хода генератора нелинейна, величина статического коэффициента передачи генератора будет зависеть от величины напряжения возбуждения UВ.
Постоянная времени обмотки возбуждения генератора
 ,
,
где LВ – индуктивность обмотки возбуждения, Гн.
2. Тиристорный преобразователь
С точки зрения динамики тиристорный преобразователь как импульсное устройство характеризуется огра
| <== предыдущая лекция | | | следующая лекция ==> |
| Колебательное звено | | | ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК ПОЛУПРОВДНИКОВЫХ ПРИБОРОВ |
Дата добавления: 2019-02-08; просмотров: 1332;
Поиск по сайту
Узнать еще
- IV. Выбор способа ориентации изображения.
- IV. Выбор способа формирования фонда капитального ремонта
- V.VII. Зависимость ширины и формы выхода слоя на поверхности от его истинной мощности, угла падения и формы рельефа
- Z-тест для сравнения выборочной доли со стандартом
- Автоматизация пуска и торможения 3-фазного асинхронного двигателя
- АВТОМАТИЧЕСКИЙ ВЫБОР ШАГА ИНТЕГРИРОВАНИЯ
- Автоматический выбор шага. Правило Рунге
- Автоматическое регулирование числа оборотов двигателя

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
