Определение принципа и закона регулирования
Простейшая система автоматического регулирования с обратной связью
Простейшая система автоматического регулирования с обратной связью показана на рис.3.1.
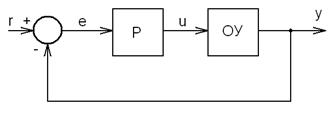
Рис. 4.1 Автоматический регулятор в системе с обратной связью
В ней блок Р называют регулятором, ОУ - объектом управления, r - управляющим воздействием или уставкой (reference), e - сигналом рассогласования или ошибки (error), u - выходной величиной регулятора, y - регулируемой величиной.
Выходная переменная uрегулятора может, в частности, описывается выражением
 4.1
4.1
где t - время;
K – пропорциональный коэффициент (безразмерный),
Ti – постоянная интегрирования (размерность времени)
Td – постоянная дифференцирования регулятора (размерность времени).
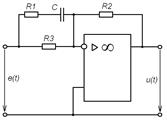
П-регулятор

 Особенности П-регулятора: высокое быстродействие; большая погрешность регулирования.
Особенности П-регулятора: высокое быстродействие; большая погрешность регулирования.
Погрешность П-регулятора обычно не может быть сделана как угодно малой путем увеличения усиления К регулятора, поскольку с ростом К сначала падает запас устойчивости по фазе и усилению системы с обратной связью, что ухудшает ее качество регулирования, затем возникают периодические колебания (система теряет устойчивость).
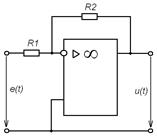
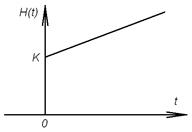
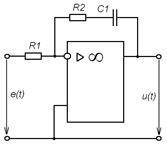
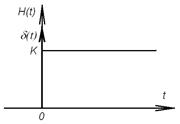
Рис. 4.2 П-регулятор на основе операционного усилителя
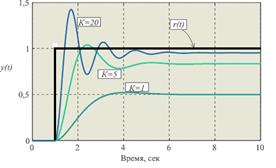

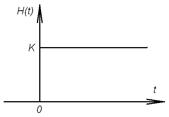
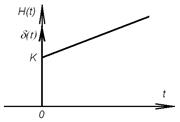
| Рис. 4.3 Переходная характеристика П-регулятора | Рис. 4.4 Изменение переменной y(t) во времени при подаче единичного скачка r(t) на вход системы при разных K. |
Переходный процесс в контуре с П-регулятором при разных К показан на рис. 4.4. При малых К система имеет малое перерегулирование, но большую статическую погрешность (50%). С ростом К погрешность уменьшается, но возрастает перерегулирование.
И-регулятор
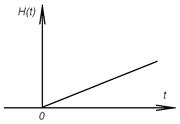
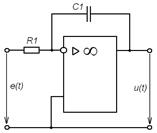
| Рис. 4.5 И-регулятор на основе операционного усилителя | Рис. 4.6 Переходная характеристика И-регулятора |
Выходная величина u(t) неизменна только при нулевом отклонении регулируемой величины y(t) от заданного значения r(t), т.е. при нулевой ошибке. Регулятор обеспечивает высокую статическую точность. Однако И-регулятор затягивает переходный процесс.
ПИ-регулятор
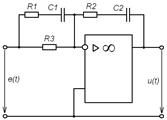
| Рис. 4.7 ПИ-регулятор на основе операционного усилителя | Рис. 4.8 Переходная характеристика ПИ-регулятора |
В отличие от П-регулятора, в котором ошибка остается в установившемся режиме, наличие интегрального члена в ПИ-регуляторе сводит эту ошибку в идеальном регуляторе к нулю, как в И-регуляторе.
ПД-регулятор
| Рис. 4.9 ПД-регулятор на основе операционного усилителя | Рис. 4.10 Переходная характеристика ПД-регулятора |
В начале переходного процесса ПД-регулятор имеет высокое усиление и, следовательно, точность, а в установившемся режиме он вырождается в П-регулятор со свойственной ему статической ошибкой. На практике ПД-регулятор используется крайне редко.
ПИД-регулятор
| Рис. 4.11 ПИД-регулятор на основе операционного усилителя | Рис. 4.12 Переходная характеристика ПИД-регулятора |
ПИД-регулятор можно получить добавлением дифференциального члена к ПИ-регулятору. Поэтому на ПИД-регулятор переносятся все свойства ПИ-регулятора и добавляются новые. Сигнал управления, который вырабатывает регулятор, определяется тем, насколько велико рассогласование (пропорциональная компонента), насколько долго сохраняется рассогласование (интегральная компонента) и, наконец, как быстро изменяется рассогласование (дифференциальная компонента). Дифференциальный член позволяет обеспечить устойчивость или улучшить качество регулирования системы в случаях, когда это невозможно сделать с помощью ПИ-регулятора.
При прочих равных условиях ПИД-регуляторы позволяют поднять точность управления в 5-100 раз по сравнению с позиционным регулятором.
Наиболее часто в задачах АСУ ТП применяются двухпозиционное регулирование и ПИД регулирование.
Определение принципа и закона регулирования
Используя данные об объекте автоматизации — статические и динамические характеристики, сведения о возмущениях, технологические требования к качеству регулирования, — можно в каждом конкретном случае на основе выработанных практикой критериев определить закон регулирования и выбрать тип регулятора. Выбор этот является предварительным, а окончательное заключение об устойчивости системы объект–регулятор и точности регулирования делают на основе последующих расчетов.
При выборе и обосновании закона регулирования, прежде всего, делают выбор между непрерывным или позиционным регулированием. При этом учитывают, что позиционные регуляторы, как правило, проще по устройству и в эксплуатации и дешевле регуляторов плавного действия. Кроме того, имеют в виду, что непрерывное регулирование может быть реализовано только на объектах, регулирующий орган которых обеспечивает плавное изменение своего положения.
Основное условие выбора принципа регулирования определяется соотношением запаздывания регулирующего воздействия и постоянной времени объекта управления τ/Т.
Время запаздывания регулирующего сигнала τ в этом случае выражается суммой:
 ,
,
где  – запаздывание в регулирующем органе и объекте управления;
– запаздывание в регулирующем органе и объекте управления;  – постоянная времени регулирующего органа.
– постоянная времени регулирующего органа.
Величина Т есть постоянная времени объекта управления.
Считается, что если τ/Т <0,2, то может быть использовано позиционное регулирование, а при τ/Т >1 требуются особо чувствительные, например импульсные, регуляторы. В промежутке между указанными пределами τ /Т от 0.2 до 1 применяется плавное регулирование.
При выборе закона непрерывного регулирования руководствуются следующими выработанными практикой положениями.
Прежде всего, ответим на вопрос: это статическая или астатическая система?
Астатические объекты и статические с малым коэффициентом статизма из соображений устойчивости не следует объединять с И-регулятором.
Объекты с большим статизмом могут быть объединены со всеми типами регуляторов.
При отсутствии значительных запаздываний, плавных возмущениях и отсутствии особых требовании ко времени переходного процесса рекомендуется И-закон, в противном случае (если допускается статическая ошибка) – П-закон.
Когда емкость объекта небольшая, а возмущения резко меняются, применяют ПД- или ПИД-закон. ПИ-регуляторы применяются для объектов со значительным запаздыванием.
Если надо увеличить быстродействие, пользуются ПИД-законом.
| <== предыдущая лекция | | | следующая лекция ==> |
| Виды обработки МЕ давлением | | | Инфекционные болезни |
Дата добавления: 2016-07-05; просмотров: 2540;
Поиск по сайту
Узнать еще
- I.2.3 ПЕРВЫЙ ЗАКОН (НАЧАЛО) ТЕРМОДИНАМИКИ. ПРИМЕНЕНИЕ ПЕРВОГО ЗАКОНА ТЕРМОДИНАМИКИ К ИЗОПРОЦЕССАМ
- II закона термодинамики
- II.3.2. Определение резус-совместимости при переливании крови
- IV. Экспериментальное определение параметров схемы замещения трансформаторов.
- VI. Определение девиации по сличению показаний двух компасов
- ІІ.5.4. Определение фрактальной размерности крестовых клеточных структур
- А вот и обещанная статья о принципах Дезинфекции и стерилизации металлического инструмента.
- А) Определение резистентности грудной клетки

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
