Схемы включения датчиков
Для подключения датчиков в системы автоматики используются следующие виды схем:
мостовая;
компенсационная;
дифференциальная
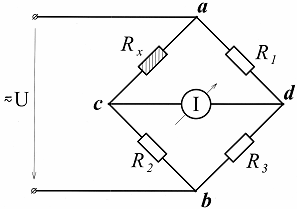
Мостовая схема включения датчиков
Схема используется для преобразования изменения параметров датчика (R, L, C) в изменение тока или напряжения в цепи.
Мостовой называется схема, которая состоит из четырех и более плеч (Z1, Z2, Z3, Z4) и двух диагоналей – питания (ac) и измерительной (bd).
Если Z1 * Z3 = Z2 * Z4, то мостовая схема называется уравновешенной и ток по измерительной диагонали не течет (РА = 0). Если равенство не выполняется, то по измерительной диагонали протекает ток.
Датчик устанавливается в одно из плеч мостовой схемы (например, Z1).
В системах автоматики применяют два вида мостовых схем включения датчиков:
балансная (равновесная);
небалансная (неравновесная)
Балансная схема предусматривает нулевой метод измерения – по измерительной диагонали ток не течет. Такая схема чаще применяется в системах управления, т.к. при изменении параметра датчика (Z1) необходимо изменить сопротивление любого из плеч, чтобы ток в измерительной цепи не протекал.
Неравновесная схема – это такая схема, у которой при изменении параметра датчика по измерительной диагонали течет ток, величина которого пропорциональна этому изменению. Такие схемы часто применяются в схемах автоматического контроля (без обратной связи).
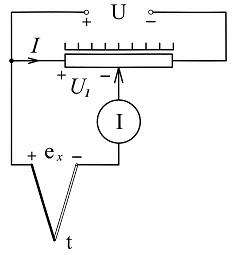
Компенсационная схема
Принцип компенсации заключается в том, что измеряемую эдс (или напряжение), поступающую от датчика, уравновешивают равным и противоположным по знаку падением напряжения, значение которого известно с высокой точностью.
Работа схемы:
Исследуемое напряжение (с датчика) подается на вход схемы Uх. С реохорда снимается напряжение Uо, которое равно падению напряжения на реохорде Rо и зависит от положения щетки реохорда.
Подвижная система гальванометра (PG) имеет вместо стрелки контакт SA, который при появлении тока в гальванометре и в зависимости от его направления замыкается вверх или вниз. При этом включается электродвигатель М и соответственно перемещает движок реохорда Rо до тех пор, пока сила тока в гальванометре не станет равной нулю. Контакты SA установятся в среднее положение, двигатель остановиться и движок реохорда останется в положении, соответствующем условию компенсации Uх = Uо до тех пор, пока Uх не изменит своего значения.
Движок реохорда можно соединить с указателем, показывающим на шкале прибора значение Uх, или с пером самопишущего прибора, а иногда, и одновременно с тем и другим.
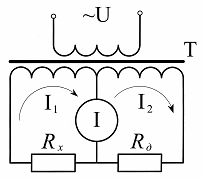
Дифференциальная схема
Схема представляет собой электрическую цепь, состоящую из двух смежных контуров, в каждом из которых действует отдельная эдс. Измерительный прибор Р включен в общую для обоих контуров цепь и реагирует на разность контурных токов.
В автоматических системах могут быть использованы следующие режимы работы дифференциальных схем:
а) при неизменных сопротивлениях обоих контуров одна из Е изменяется на величину ΔЕ
б) при неизменных сопротивлениях обоих контуров обе Е1 и Е2 изменяются на величину ΔЕ;
в) при неизменных Е1 и Е2 изменяется сопротивление Z одного из контуров;
г) при неизменных Е1 и Е2 изменяются сопротивления Z1 и Z2 обоих контуров.
Достоинство этих схем: чувствительность по току при большом сопротивлении выше, чем у мостовой схемы.
Потенциометрические датчики а- линейный; б- угловой; в- схема включения; г- статическая характеристика; 1- каркас; 2 – провод; 3- токосъёмный контакт
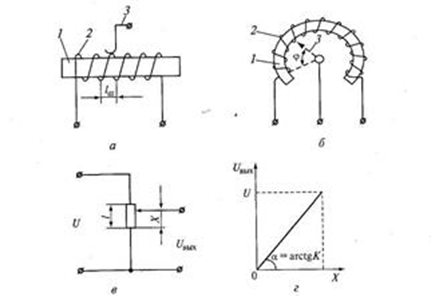
Преобразуют перемещение чувствительного элемента (подвижного контакта) в изменение электрического сопротивления самого датчика .
Различают датчики:
с угловым перемещением (кольцевые и секторные)
с линейным перемещением (прямоугольные)
В зависимости от конструкции реохорда датчики могут быть:
линейными – выходная величина датчика пропорциональна входной величине, т.к. сечение каркаса датчика, диаметр проволоки, шаг намотки одинаковы по всей длине;
функциональными – обладают нелинейной характеристикой, т.к. каркас, шаг намотки или диаметр проволоки по длине датчика не одинаковы
Недостатки датчиков:
наличие подвижного контакта;
трудность получения линейной характеристики;
наличие вспомогательного источника питания.
Достоинства:
простая конструкция;
не требует усиления сигнала на выходе датчика.
Индуктивные датчики

Принцип действия индуктивных датчиков основан на зависимости индуктивного сопротивления катушки индуктивности от:
изменения зазора в магнитопроводе – перемещение до 2мм;
перемещения магнитопровода в катушке – перемещение до 50мм;
изменения площади зазора между катушкой и сердечником – перемещение до 8мм.
Достоинства:
неограниченный срок службы;
большая мощность выходного сигнала;
высокая надежность;
отсутствие подвижных контактов.
Недостатки:
небольшой диапазон перемещения;
наличие холостого тока;
влияние колебаний амплитуды и частоты напряжения питания;
наличие вспомогательного источника питания.
Трансформаторный датчик (индуктивный преобразователь)
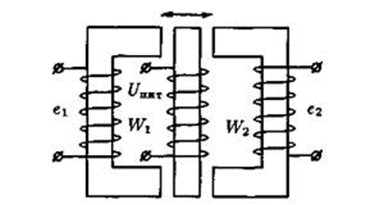
Трансформаторные датчики имеют на своем выходе взаимоиндуктивность и поэтому они относятся к группе индуктивных датчиков.
Катушка датчика изготовлена в виде рамки, пронизываемой переменным магнитным потоком, который создается обмоткой возбуждения, подключенной к источнику стабилизированного напряжения стандартной частоты. При повороте катушки изменяется значение пронизывающего ее магнитного потока, а, следовательно, и индуктированной эдс. С помощью формы полюсных наконечников можно получить прямолинейную статическую характеристику при повороте рамки на ±70о. Соединяя механической связью ось рамки с осью стрелки показывающего прибора, можно преобразовать поворот рамки в показания прибора.
Индуктивные датчики применяются в системах автоматики и телемеханики для измерения линейных и угловых перемещений.
Емкостные датчики

Служат для преобразования неэлектрической величины
перемещение;
влажность;
уровень вещества;
усилие и т.п.
в изменение электрической емкости.
Чувствительным элементом является конденсатор, у которого при воздействии измеряемого параметра изменяется:
С =ξs/d
а) расстояние между пластинами (d);
б) рабочая площадь пластин (s);
в) диэлектрическая проницаемость среды между обкладками (ξ )
Достоинства:
- простые по устройству;
имеют малые размеры и массу;
обладают высокой чувствительностью
Недостатки:
малая мощность выходного сигнала;
влияние внешних магнитных полей;
необходимость высокочастотного источника питания, т.к. на низких частотах нельзя получить выходной сигнал большой мощности.
Дата добавления: 2020-03-21; просмотров: 1877;
Поиск по сайту
Узнать еще
- А. Составление схемы технологического процесса
- Автоматическое отключение насосов при аварийном увеличении температуры подшипников насосов или электродвигателей. Контроль осуществляется с помощью датчиков температуры.
- Алгоритм работы схемы
- Алгоритм режимов работы схемы пускателя ПВИ-250Б
- Алгоритм режимов работы схемы пускателя ПВИ-63Б, ПВИ-125Б
- Алгоритм режимов работы схемы пускового агрегата АПШ-1
- Анализ организационно-технологической схемы проектируемого потока
- Анализ работы схемы параметрического стабилизатора напряжения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
