Оценка качества регулирования в установившемся режиме. Коэффициенты ошибок
Рассмотрим показатели качества, характеризующие вынужденную составляющую ошибки eв(t). Если на входе системы действует сигнал g(t), то установившаяся ошибка регулирования системы eв(t) = g(t)- xв(t).
Если g(t) дифференцируема во всем интервале 0< t < ¥, то ошибка системы eв(t) может быть представлена в виде ряда:
 (2.3)
(2.3)
где коэффициенты С0, С1, С2 … принято называть коэффициентами ошибок. Формула (2.3) получена следующим образом.
Передаточная функция замкнутой системы относительно ошибки:
 (2.4)
(2.4)
Изображение ошибки соответственно:
 (2.5)
(2.5)
Разложим передаточную функцию по ошибке Wgε(s) в ряд по возрастающим степеням s в окрестности точки e = 0, что соответствует большим значениям времени (t ® ¥), т. е. значению установившейся ошибки при заданном управляющем воздействии.
В соответствии с (2.5) можно записать:
 (2.6)
(2.6)
Если П.Ф. Wgε(s) является дробно-рациональной функцией:

то разложение в ряд Wgε(s) можно осуществить делением числителя на знаменатель, располагая члены полинома в порядке возрастания степеней. Переходя в (2.6) от изображений к оригиналам, можно получить для eв(t) выражение (2.3).
Коэффициенты ошибок определяют по формулам разложения функции Wgε(s) в ряд Тейлора:
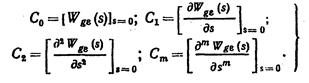 (2.7)
(2.7)
Если g(t) = 1(t), то все производные = 0 , тогда

Если g(t) = t, то dg(t)/dt = 1, a d2g(t)/dt2=0=…=0; коэффициенты ошибок

С0 – коэффициент статической или позиционной ошибки;
С1 – коэффициент скоростной ошибки;
С2 – коэффициент ошибки от ускорения.
В статических системах коэффициент С0 отличен от нуля. В системах с астатизмом первого порядка С0 = 0, С1 не равен нулю. В системах с астатизмом второго порядка С0=С1=0, С2 не равен нулю и т.д. Увеличение числа интегрирующих звеньев приводит к повышению порядка астатизма системы, т.е. к нулевым значениям нескольких коэффициентов ошибок, но при этом усложняется обеспечение устойчивости системы. Если на систему действует помимо задающего воздействия еще и возмущающее, то астатизм системы относительно задающего и возмущающего воздействий зависит от места включения интегрирующего звена.
Нужно отметить, что метод коэффициентов ошибок применяется при сравнительно медленно меняющихся воздействиях.
21. Качество процесса регулирования в переходном режиме. Прямые показатели качества
Переходный процесс в системе зависит не только от свойств САУ, но и от характера внешнего воздействия, которое в общем случае может быть сложной функцией времени. Поведение системы рассматривают при следующих типовых воздействиях: единичной ступенчатой функции 1 (t), импульсной δ(t) и гармонической функций. Прямые оценки качества получают по кривой переходной характеристики h(t), т. е. при воздействии единичной ступенчатой функции

и нулевых начальных условиях.
Эту характеристику можно построить для выходной величины или для отклонения εcв(t) (рисунок 1.3, а, б). К прямым оценкам качества относят:
1. Время регулирования tp — минимальное время, по истечении которого регулируемая величина будет оставаться близкой к установившемуся значению с заданной точностью
 при
при 
или

где Δ — постоянная величина, значение которой нужно оговаривать (задается величина Δ в процентах от установившегося значения выходной величины hуст).
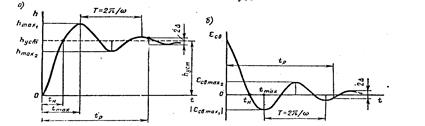
Рисунок 1.3 – Переходная характеристика и ошибка ε(t) звена с отмеченными на ней прямыми показателями качества
2. Перерегулирование σ — максимальное отклонение переходной характеристики от установившегося значения выходной величины, выраженное в относительных единицах или процентах:

где hmax1 — значение первого максимума, или

Допустимое значение перерегулирования в каждом конкретном случае будет подсказано опытом эксплуатации системы, обычно σ = 10 — 30 %, но в некоторых случаях допускается и до 70 %. Иногда перерегулирование недопустимо совсем.
3. Частоту колебаний ω = 2π/Т, где Т — период колебаний для колебательных переходных характеристик.
4. Число колебаний п, которое имеет переходная характеристика h(t) или εсв(t) за время регулирования (tр).
При проектировании систем чаще всего допускают п = 1 — 2, а иногда и до 3—4, но в некоторых случаях колебания в системе недопустимы.
5. Время достижения первого максимума tmax
6. Время нарастания переходного процесса tн — абсциссу первой точки пересечения кривой переходной характеристики h(t) с уровнем установившегося значения hуст или кривой отклонения εсв(t) с осью абсцисс.
8. Декремент затухания κ, равный отношению модулей двух смежных перерегулирований:
Перечисленные показатели качества могут быть дополнены другими, но это обусловлено спецификой конкретной системы.
Определение приведенных выше прямых оценок качества переходного процесса проиллюстрировано на рисунке 1.4, а, б. Переходные процессы, возникающие в системах при скачкообразных воздействиях, принято делить на три группы: монотонные, апериодические и колебательные. У монотонных процессов первая производная выходной величины dх(t)/dt меняет знак (кривая а на рисунке 1.4), у апериодических знак производной dх(t)/dt меняется не более одного
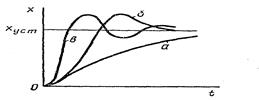
Рисунок 1.4 – Различные виды переходных характеристик
раза (кривая б на рисунке 1.4), а у колебательных — первая производная dх(t)/dt меняет свой знак периодически (теоретически бесконечное число раз) (кривая в на рисунке 1.4).
Нужно отметить, что в настоящее время при бурном развитии вычислительной техники трудности, связанные с расчетом переходных процессов и выбором возможных вариаций параметров системы, существенно уменьшаются, поэтому роль прямых оценок качества при проектировании САУ возрастает.
Дата добавления: 2022-07-20; просмотров: 399;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
