Интегральные оценки качества
Интегральные оценки имеют целью дать общую оценку быстроты затухания и величины отклонения регулируемой величины в совокупности, без определения того и другого в отдельности. Простейшая интегральная оценка – величина
 ,
,
где x(t) – отклонение регулируемой величины от нового установившегося значения, которое она будет иметь после завершения переходного процесса.
В устойчивой системе x → 0 при t→ ¥ и этот интеграл имеет конечную величину. Геометрически это будет площадь под кривой переходного процесса (рисунок 2.7).
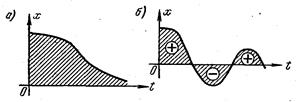
Рисунок 2.7 – Интегральный показатель качества
Неудобством данной оценки является то, что она годится только для монотонных процессов, когда не меняется знак отклонения х. Если же процесс колебательный, то при вычислении интеграла площади будут складываться алгебраически и минимум этого интеграла может соответствовать колебаниям с малым затуханием. Так как форма переходного процесса обычно неизвестна, то применять эту оценку практически нецелесообразно.
Целесообразно перейти к квадратичной интегральной оценке, называемой иногда «квадратичной площадью» регулирования:
I = 0∫¥ x2dt (x→0 при t→¥),
Которая не зависит от знаков отклонений, а значит, и от формы переходного процесса (монотонный или колебательный).
Величина I будет тем меньше, чем меньше сумма заштрихованных на рисунок 2.8 площадей (взятых для квадратов ординат), т.е. чем лучше переходный процесс приближается к идеальному скачку регулируемой величины вслед за скачком задающего или возмущающего воздействия.
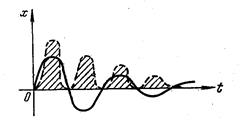
Рисунок 2.8 – Квадратичный интегральный показатель качества
В безразмерном виде:
I0 = Ω0/C2 0∫¥ x2dt
Где x = x(t) обозначает отклонение регулируемой величины в переходном процессе от ее нового установившегося значения: x(t) = y(t) – y(¥); С – некоторая величина, имеющая размерность регулируемой величины; Ω0 – среднегеометрическое значение корня.
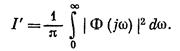
Вычисление квадратичных интегральных оценок можно производить на основании формулы Релея.
Если X(jω) есть изображение Фурье функции времени x(t), то существует зависимость, определяемая теоремой Парсеваля:
 (2.24)
(2.24)
т.е. интегрирование квадрата функции по времени в пределах от нуля до бесконечности можно заменить интегрированием квадрата модуля изображения Фурье этой функции по всем частотам. При нахождении интегральной оценки I, которая соответствует реакции системы на единичное ступенчатое входное воздействие типа 1(t), изображение Фурье исследуемого отклонения x(t) = y(¥) - y(t) будет:
 (2.25)
(2.25)
тогда
 (2.26)
(2.26)
В астатических системах и статических системах с неединичной обратной связью или с масштабированием установившееся значение y(¥) = 1 и Ф(0)=1. Тогда формула (2.26) будет иметь вид:
 (2.27)
(2.27)
Для входного задающего воздействия типа единичного импульса δ(t), изображение которого равно 1, изображение Фурье исследуемого отклонения x(t) = - y(t) равно частотной передаточной функции замкнутой системы: X(jω)= Ф(jω).. В результате получаем:
 (2.28)
(2.28)
Недостатком интегральных оценок является то, что здесь ничем не ограничивается форма кривой переходного процесса. Оказывается, что три совершенно различные по форме процесса (рисунок 2.9) имеют одно и то же значение квадратичной интегральной оценки.
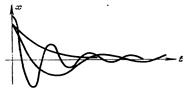
Рисунок 2.9 – Различные переходные процессы для одного значения квадратичной интегральной оценки
Часто оказывается, что выбранные по минимуму интегральной оценки параметры системы соответствуют слишком сильно колебательному процессу. Это получается вследствие того, что оценка учитывает только величину отклонения и быстроту затухания и никак не учитывает близость системы к колебательной границе устойчивости.
25. Методы построения переходного процесса. Построение переходного процесса по вещественной частотной характеристике замкнутой системы (метод трапеций)
26. Методы повышения точности регулирования в установившемся режиме
Исследованная ранее устойчивость системы обеспечивает затухание переходных процессов с течением времени, т.е. обеспечивает принципиальную возможность прихода системы в некоторое установившееся состояние при любом внешнем возмущении.
Однако далее требуется, во-первых, чтобы это установившееся состояние было достаточно близко к заданному и, во-вторых, чтобы затухание переходного процесса было достаточно быстрым, а отклонения (колебания) при этом были бы невелики.
Поэтому после обеспечения устойчивости системы нужно позаботиться о требуемом качестве переходного процесса, в понятие которого входят, в частности:
· точность системы в установившемся состоянии;
· качество переходного процесса;
· повышение запаса устойчивости (демпфирование).
Иногда несколько частных задач могут быть решены совместно, в других случаях они оказываются противоречивыми. В зависимости от назначения системы и предъявляемых к ней требований одни задачи становятся основными, а другие отодвигаются на второй план или даже снимаются.
Рассмотрим точность регулирования.
В системе регулирования по отклонению установившаяся ошибка имеет три составляющие:
εуст = εg + εf + εч.э. (4.1)
где εf – ошибка, вызываемая действием возмущения; εg – ошибка воспроизведения задающего воздействия; εч.э. – ошибка чувствительного элемента, измеряющего рассогласование.
Составляющая εч.э. зависит от физической природы и конструкции чувствительного элемента. Она может быть уменьшена лишь использованием высокоточного элемента. При этом может потребоваться снижение уровня сравниваемых сигналов и, следовательно, увеличение передаточных коэффициентов остальных элементов регулятора.
Как было показано в лекции 2, установившаяся ошибка может быть представлена в виде ряда. Нужно отметить, что в статической системе:
 (4.2)
(4.2)
где к – передаточный коэффициент разомкнутой системы; кf – передаточный коэффициент прямой цепи от возмущения f до выходной координаты у.
Следовательно, уменьшение установившейся ошибки при постоянных значениях задающего воздействия и возмущения достигается увеличением передаточного коэффициента разомкнутой системы. Однако, с увеличением статической точности в большинстве случаев уменьшаются запасы устойчивости и при значительном увеличении к система становится неустойчивой. (рисунок 4.1)
Рисунок 4.1 – ЛАЧХ и ЛФЧХ для звена с разными коэффициентами усиления
То есть, если увеличивать статическую точность повышением коэффициента усиления разомкнутой системы, необходимы мероприятия для обеспечения достаточного запаса устойчивости.
Другой путь повышения статической точности – обеспечение астатизма. В астатической системе младшие коэффициенты ошибки имеют следующие значения:
С0 = 0; С1 = 1/Кv; C0f = 0; C1f = kf/kv,
Где кv передаточный коэффициент разомкнутой системы, называемый добротностью системы по скорости.
Таким образом, в астатической системе отсутствуют установившаяся ошибка от постоянного задающего воздействия и постоянных возмущений.
Астатизм достигается введением интегрирующего звена в прямую цепь системы.
Однако введение интегрирующего звена приводить к ухудшению динамических свойств системы, ЛФЧХ сместится вниз на 90 град. По сравнению с исходными характеристиками уменьшится запас устойчивости по фазе.
Таким образом, при повышении статической точности путем введения интегрирующего звена могут оказаться необходимыми мероприятия по сохранению запасов устойчивости САУ.
Значительно лучшие результаты получают при получении астатизма с помощью изодромного звена, т.е. звена с передаточной функцией Wi(s) = ki(Tis + 1)/s = 1 + ki/s, где Тi = 1/ki – постоянная времени изодрома.
Если постоянная времени достаточно велика, то запас устойчивости может быть сохранен неизменным. Уменьшение передаточного коэффициента разомкнутой системы должно быть скомпенсировано увеличением коэффициента усиления усилителя. Следует учитывать, что при большом значении Тi могут увеличиться старшие коэффициенты ошибки.
Астатизм САУ относительно задающего воздействия можно обеспечить более простыми способами: неединичной обратной связью и масштабированием.
Структурная схема с неединичной обратной связью показана на рис. 4.2. а).

а) б)
Рисунок 4.2 – Звено а) – с масштабированием; звено б) – с отрицательной неединичной обратной связью
В установившемся режиме регулируемая величина связана с постоянным задающим воздействием соотношением:
 (4.3)
(4.3)
где Kn – коэффициент усиления прямой цепи.
Если выполнить основную обратную связь системы с коэффициентом k0 = 1 – 1/kп, то y = g0 и система относительно задающего воздействия будет астатической.
Структурная схема системы с масштабированием входной величины показана на рисунке 4.2 б. Ее особенность – наличие усилительного звена с передаточным коэффициентом m на входе. В установившемся режиме:
 (4.4)
(4.4)
При m = 1 + 1/k получаем y = g0 и система является астатической относительно задающего воздействия.
Недостаток этих способов в том, что астатизм обеспечивается только при сохранении указанных соотношений между передаточными коэффициентами. Неточное определение передаточного коэффициента какого-либо элемента системы и его изменение в процессе эксплуатации ведут к появлению статической ошибки. Астатизм, достигнутый введением интегрирующего или изодромного звена, сохраняется и при изменении параметров системы.
Дата добавления: 2022-07-20; просмотров: 127;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
