УПРАВЛЯЕМЫЕ СИСТЕМЫ
Несмотря на такое многообразие задач, решаемых в разных разделах кибернетики, разнообразие моделей, подходов и методов, кибернетика остается единой наукой благодаря использованию общей методологии, основанной натеории систем и системном анализе.
Система - это предельно широкое, начальное, не определяемое строго понятие. Предполагается, что система обладает структурой, т.е. состоит из относительно обособленных частей (элементов), находящихся, тем не менее, в существенной взаимосвязи и взаимодействии. Существенность взаимодействия состоит в том, что благодаря ему элементы системы приобретают все вместе некую новую функцию, новое свойство, которыми не обладает ни один из элементов в отдельности. В этом состоит отличие системы от сети, также состоящей из отдельных элементов, но не связанных между собой существенными отношениями. Сравните, например, предприятие, цеха которого образуют систему, поскольку лишь все вместе приобретают свойство выпускать конечную продукцию (и ни один из них в отдельности с этой задачей не справится), и сеть магазинов, которые могут работать независимо друг от друга.
Кибернетика как наука об управлении изучает не все системы вообще, а только управляемыесистемы. Зато область интересов и приложений кибернетики распространяется на самые разнообразные биологические, экономические, социальные системы.
Одной из характерных особенностей управляемой системы является возможность переходить в различные состояния под влиянием различных управляющих воздействий. Всегда существует некое множество состояний системы, из которых производится выбор предпочтительного состояния.
Отвлекаясь от конкретных особенностей отдельных кибернетических систем и выделяя общие для некоторого множества систем закономерности, описывающие изменение их состояния при различных управляющих воздействиях, мы приходим к понятию абстрактнойкибернетической системы. Ее составляющими являются не конкретные предметы, а абстрактные элементы, характеризующиеся определенными свойствами, общими для широкого класса объектов.
Поскольку под кибернетическими системами понимаются управляемые системы, в них должен присутствовать механизм, осуществляющий функции управления. Чаще всего этот механизм реализуется в виде органов, специально предназначенных для управления, рис. 1.44.

Рис. 1.44. Схематическое изображение кибернетической системы
в виде совокупности управляющей (А) и управляемой (В) частей
Стрелками на рисунке обозначены воздействия, которыми обмениваются части системы. Стрелка, идущая от управляющей части системы к управляемой, обозначает сигналы управления. Управляющая часть системы, вырабатывающая сигналы управления, называется управляющим устройством. Управляющее устройство может вырабатывать сигналы управления, обычно на основе информации о состоянии управляемой системы (изображены на рисунке стрелкой от управляемой части системы к управляющей ее части), о требуемом ее состоянии, о возмущающих воздействиях. Совокупность правил, по которым информация, поступающая в управляющее устройство, перерабатывается в сигналы управления, называется алгоритмом управления.
На основе введенных понятий можно определить понятие «управление». Управление - это воздействие на объект, выбранное из множества возможных воздействий на основе имеющейся для этого информации, улучшающее функционирование или развитие данного объекта.
В системах управления решаются четыре основных типа задач управления: 1) регулирование (стабилизация), 2) выполнение программы, 3) слежение и 4) оптимизация.
Задачами регулирования являются задачи поддержания параметров системы -управляемых величин - вблизи некоторых неизменных заданных значений {х} несмотря на действие возмущений М, влияющих на значения {х}. Здесь имеется в виду активная защита от возмущений, принципиально отличающаяся от пассивного способа защиты.Пассивная защита заключается в придании объекту таких свойств, чтобы зависимость интересующих нас параметров от внешних возмущений была мала. Примером пассивной защиты является теплоизоляция для поддержания заданной температуры системы, антикоррозионные покрытия деталей машин. Активная защита предполагает выработку в управляющих системах управляющих воздействий, противодействующих возмущениям. Так, задача поддержания необходимой температуры системы может быть решена с помощью управляемого подогрева или охлаждения.
Задача выполнения программы возникает в случаях, когда заданные значения управляемых величин {х} изменяются во времени известным образом, например, в производстве при выполнении работ согласно заранее намеченному графику. В биологических системах примерами выполнения программы являются развитие организмов из яйцеклеток, сезонные перелеты птиц, метаморфозы насекомых.
Задача слежения - поддержание как можно более точного соответствия некоторого управляемого параметра X0(t) текущему состоянию системы, меняющемуся непредвидимым образом. Необходимость в слежении возникает, например, при управлении производством товаров в условиях изменения спроса.
Задачи оптимизации - установления наилучшего в определенном смысле режима работы или состояния управляемого объекта - встречаются весьма часто. Примерами являются: управление технологическими процессами с целью минимизации потерь сырья и т.д.
Системы, в которых для формирования управляющих воздействий не используется информация о значениях, которые управляемые величины принимают в процессе управления, называютсяразомкнутыми системами управления. Структура такой системы показана на рис. 1.45.
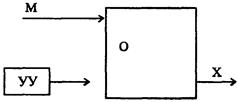
Рис. 1.45. Алгоритм управления, реализуемый управляющим устройством УУ, которое обеспечивает слежение за возмущением М и компенсацию этого возмущения, без использования управляемой величины Х
Напротив, в замкнутых системах управления для формирования управляющих воздействий используется информация о значении управляемых величин. Структура такой системы показана на рис. 1.46.
Обратная связь является одним из важнейших понятий кибернетики, помогающим понять многие явления, которые происходят в управляемых системах различной природы. Обратную связь можно обнаружить при изучении процессов, протекающих в живых организмах, экономических структурах, системах автоматического регулирования. Обратная связь, увеличивающая влияние входного воздействия на управляемые параметры системы, называется положительной, уменьшающая влияние входного воздействия - отрицательной.
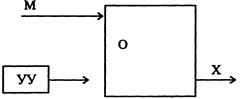
Рис. 1.46. Связь между выходными параметрами А" и входными У одного и того же элемента управляемой системы называется обратной связью
Положительная обратная связь используется во многих технических устройствах для усиления, увеличения значений входных воздействий. Отрицательная обратная связь используется для восстановления равновесия, нарушенного внешним воздействием на систему.
Дата добавления: 2020-02-05; просмотров: 783;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее
- T-FlexCAD (Топ Системы, Москва) и др.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
