Регулирование координат асинхронного двигателя с помощью резисторов
Этот способ регулирования часто называют реостатным. Он заключается во введении добавочных (активных) сопротивлений в статорную или роторную цепь Д. Способ очень прост, но сопровождается значительными потерями и не позволяет получить высокое качество регулирования. Здесь может быть несколько вариантов [9].
Первый вариант: включение добавочного резистора  в цепь статора.
в цепь статора.
 .
.
Этот способ применяется для ограничения токов в переходный период. Обычно он используется для Д с короткозамкнутым ротором. Очевидно, что включение резистора приводит к снижению тока ротора и статора и не влияет на величину скорости идеального хода:
 .
.
Критическое скольжение уменьшается:
 .
.
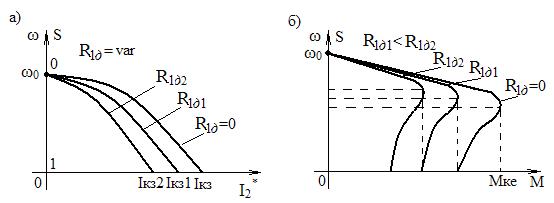
Рис. 5.5. Электромеханические (а) и механические (б) характеристики АД при введении добавочного резистора в цепь статора
Электромеханические характеристики (рис. 5.5, а) выходят из одной точки  . С увеличением сопротивления жесткость характеристик уменьшается, и располагаются они в первом квадранте левее и ниже естественной. Как видно из характеристик, этот способ можно использовать для ограничения тока Д.
. С увеличением сопротивления жесткость характеристик уменьшается, и располагаются они в первом квадранте левее и ниже естественной. Как видно из характеристик, этот способ можно использовать для ограничения тока Д.
Анализ механических характеристик (рис. 5.5, б) показывает, что они также выходят из одной точки и располагаются ниже и левее естественной. С увеличением критический момент уменьшается, уменьшается также и критическое скольжение. Использовать этот метод для регулирования частоты вращения не представляется возможным из-за малого диапазона регулирования и малой перегрузочной способности. Этот способ также отличает низкая экономичность. Применяется данный способ, как правило, лишь для ограничения токов и моментов при пуске, торможении и реверсе.
Примечание: может быть использовано импульсное регулирование координат привода за счет замыкания ключом резисторов, включенных в цепь статора.
Второй вариант: включение добавочного резистора  в цепь ротора.
в цепь ротора.
Этот метод используется только в Д с фазным ротором и состоит во введении добавочного сопротивления  в цепь ротора. В данном случае переменной величиной является = var. При этом электромеханическая характеристика Д останется такой же, как и в предыдущем случае, а механическая будет существенно отличаться. Учитывая то, что критический момент не зависит от сопротивления фазы ротора (Мк=const), а критическое скольжение меняется, отсюда механические характеристики имеют вид, представленный на рис. 5.6.
в цепь ротора. В данном случае переменной величиной является = var. При этом электромеханическая характеристика Д останется такой же, как и в предыдущем случае, а механическая будет существенно отличаться. Учитывая то, что критический момент не зависит от сопротивления фазы ротора (Мк=const), а критическое скольжение меняется, отсюда механические характеристики имеют вид, представленный на рис. 5.6.
По своим возможностям и характеристикам этот способ соответствует способу регулирования частоты вращения ДПТ НВ изменением сопротивления в цепи якоря.
При увеличении характеристики выходят из одной точки и располагаются ниже естественной. Диапазон регулирования  . Плавность зависит от плавности изменения регулировочного резистора . Данный способ неэкономичен. Применяется он при кратковременном регулировании частоты вращения, а также для регулирования тока и момента. В этой схеме возможно добиться увеличения пускового момента, и при этом перегрузочная способность Д не меняется. Этот способ широко используется в крановых Д. Потери в роторе пропорциональны скольжению, поэтому при увеличении увеличиваются и потери.
. Плавность зависит от плавности изменения регулировочного резистора . Данный способ неэкономичен. Применяется он при кратковременном регулировании частоты вращения, а также для регулирования тока и момента. В этой схеме возможно добиться увеличения пускового момента, и при этом перегрузочная способность Д не меняется. Этот способ широко используется в крановых Д. Потери в роторе пропорциональны скольжению, поэтому при увеличении увеличиваются и потери.
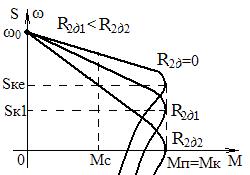
Рис. 5.6. Механические характеристики АД при введении
добавочного сопротивления в цепь ротора
Примечание: возможно импульсное регулирование частоты вращения этим методом (рис. 5.7).

|  |
|
 Рис. 5.7. Схема включения (а) и механические характеристики (б) АД при импульсном регулирования координат
Рис. 5.7. Схема включения (а) и механические характеристики (б) АД при импульсном регулирования координат
t1 – время замкнутого состояния ключа К;
t2 – время разомкнутого состояния ключа К.
При замыкании ключа К резистор R шунтируется и двигатель работает на естественной характеристике.
Дата добавления: 2016-06-15; просмотров: 2282;
Поиск по сайту
Узнать еще
- C помощью микроскопа
- I. Установка для исследования сдвига фаз колебаний силы тока и напряжения с помощью компьютера и осциллографа-приставки
- II закон Ньютона в векторной и координатной форме
- III. Решение логических задач с помощью рассуждений
- III. Схема замещения и векторная диаграмма асинхронного двигателя
- U – образные и рабочие характеристики синхронного двигателя
- VII. Регулирование частоты вращения двигателя
- А) Система астрономических координат

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
