Разметка графа микропрограммы
При использовании МПА на основе автомата Мили, как и в случае автомата Мура, состояния автомата отображаются в виде окружностей, но каждое состояние автомата ассоциируется не с вершинами графа (точками формирования управляющих сигналов), а с переходами через эти вершины.
Основные правила разметки графа микропрограммы для автомата Мили:
1. Начальное состояние а0отмечается на выходе начальной вершины МП. Остальные состояния ставятся после операторной вершины.
2. Выход начальной и вход конечной вершины графа МП соответствуют состоянию а0 графа автомата Мили.
3. Вход вершины, следующей за операторной вершиной графа МП, соответствует определенному состоянию автомата Мили.
4. Отметка состояния аi ставится на входе вершины ниже стрелок из операторных вершин и выше стрелок из условных вершин.
На рис.8.5 и 8.6 представлены примеры, поясняющие правила разметки графа МП при построении графа автомата Мили и пример построения графа автомата Мили.
Первая часть последнего правила применяется для сокращения числа состояний автомата, вторая часть – для исключения пустых тактов. Например, при отметке состояния графа МП ниже стрелки из условной вершины (точка b2) появляется пустой такт (без формирования сигналов управления) при переходе из вершины a0 на вершину b2.
Соблюдение указанных правил позволяет для МП со сложными переходами составлять графы автоматов с уменьшенным количеством вершин, т.е. с меньшим количеством состояний. При этом могут использоваться более простой регистр и дешифратор состояний.
Состояния автомата Мили обозначены в вершинах графа. Вершины соединены путями возможных переходов. Рядом с каждым путем перехода (над чертой) указаны комбинации сигналов оповещения, которые определяют эти переходы. Отсутствие сигналов оповещения (безусловные переходы) обозначено прочерком. Рядом (под чертой) представлены микрокоманды - Yi (наборы формируемых сигналов управления).
Разметка графа МП и граф микропрограммного автомата Мили для устройства алгебраического сложения/вычитания целых чисел со знаком в прямом коде представлены на рис 8.6 и рис. 8.7.
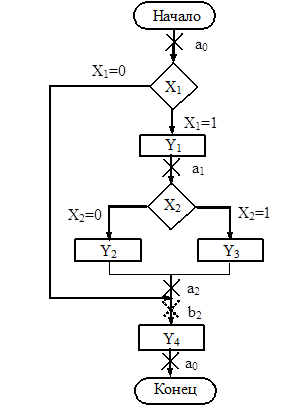
Рис.8.6.Пример разметки графа МП для построения графа автомата Мили

Рис.8.7.Пример построения графа автомата Мили
Конкретные наборы микроопераций для каждой микрокоманды представлены в табл. 11 (Совмещенная таблица выходов и переходов автомата Мили).
Таблица 11. Совмещенная таблица выходов и переходов автомата Мили
| Исходное состояние | Код исходного состояния | Состояние перехода | Код состояния перехода | Входные сигналы (оповещения) | Выходные сигналы | Сигналы переходов D-триг. | Сигналы переходов JK-триг. |
| а0 | а1 | – | у1 | D3 | J3 | ||
| а1 | а6 | – | у2, y6(tз), | D1D2 | J1, J2, K3 | ||
| а6 | а2 | p | y4,y6(tз), | D2 | K1 | ||
| а6 | а3 | 
| y4, у5, y6(tз) | D2 D3 | J1, K3, | ||
| а3 | а2 | X3 | y5, y6(tз), y7, | D2 | K3 | ||
| а3 | а2 | 
| y7, , | D2 | K3 | ||
| а2 | а0 | y3 | K2, | ||||
| Формирование сигнала окончания цикла W = а2. |
Совмещенная таблица выходов и переходов автомата Мили строится по графу автомата (рис.8.9) аналогично построению таблицы выходов и переходов автомата Мура.
Проектирование комбинационной схемы выходов (см. рис. 8.1)
Особенностью автомата Мили является то, что для него переходы являются функцией двух переменных:
y(ai) = f [a(ai), b(хi)],
т.е. зависят от состояния ai и сигналов оповещения yi.
Следовательно, для определения функций выходных сигналов (микрокоманд) нужно отметить все состояния автомата, в которых они должны формироваться c учетом сигналов оповещения, атакже, возможно, произвести простейшие преобразования уравнений:
y1 = a0 (1),
y2 = a1 (2),
y3 = a2 (3),
y4 = a6 (4),
y5 = a6 +a3 X3 (5),
y6(tз) = а1 + a6 + a3 X3= a6 + X3 a3, (6),
y7 = а3 +  a3, (7),
a3, (7),
W = a2 (8).
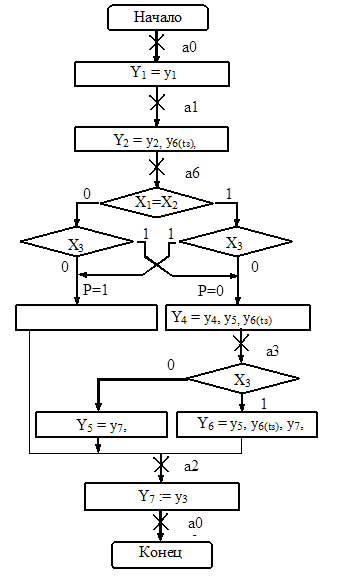
Рис.8.8. Разметка графа МП алгебраического сложения/вычитания целых чисел со знаком в прямом коде для построения автомата Мура Мили.
Проектирование комбинационной схемы сигналов переходов (см. рис. 8.1)
Сигналы переходов являются функциями состояния автомата и входных сигналов (сигналов оповещения с операционной части).
 |
Рис. 8.9. Граф автомата Мура Мили.алгебраического сложения/вычитания целых чисел со знаком в прямом коде для построения автомата

Здесь так же, как и для автомата Мура возможны два варианта:
· использование регистра состояния на D – триггерах.
· использование регистра состояния на JK – триггерах.
Вариант использования D – триггеров
Для нахождения функций переходов по таблице 8.1 11 для каждого сигнала перехода Di составляют дизъюнкцию из всех комбинаций состояния автомата аiивходных сигналов оповещения xi , атакже, возможно, производят простейшие преобразования уравнений:
D1 = a1, (11)
D2 = a1 + (p a6 +  a6) + (a3 X3 + a3 ) или:
a6) + (a3 X3 + a3 ) или:
D2= a1 + a6 + a3 (12)
D3 = a6 (13).
Вариант использования JK – триггеров
Для нахождения функций переходов по таблице 8.1 11 для каждого сигнала перехода Ji и Kiотмечают все комбинации состояния автомата аiивходных сигналов оповещения xi, атакже, возможно, производят простейшие преобразования уравнений:
J1 = a1 (16),
J2 = a1 (17),
J3 = (p a6 + a6) = a6 (18)
K1 =(p a6 + a6) = a6 = J3 (19),
K2 = a2 (20),
K3 = a1 + (a3 X3 + a3  ) = a1 + a3 (21).
) = a1 + a3 (21).
W = a2 (22).
По полученным уравнениям функционирования автомата Мили строятся функциональная, а затем и принципиальная схемы комбинационных частей устройства управления. Построение функциональных и принципиальных схем на основе автомата Мили, аналогично их построению на основе автомата Мура.
Дата добавления: 2022-02-05; просмотров: 675;
Поиск по сайту
Узнать еще
- А) нанесение осей и контуров здания; б, в) разметка и вычерчивание деталей фасада; г) нанесение размеров и оформление
- А) сетка координационных осей; б) привязка стен, разметка перегородок; в) вычерчивание деталей; г) нанесение размеров и оформление
- Графа 12. «Сведения о стоимости»
- Графа 42 «Цена товара»
- Графа 47 «Начисления платежей»
- Загальна характеристика вузлів газового хроматографа
- Запишите определение термина «разметка».
- Измерение электрических величин с помощью электронно-лучевого осциллографа

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
