Бортовое оборудование объектов навигации.
Принципы построения многопозиционных пассивных СРНС
Состав СРНС
Существенным достоинством СРНС является глобальность обеспечиваемой ими зоны обслуживания.
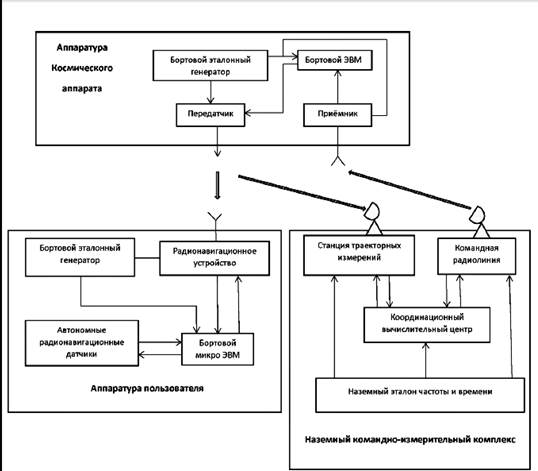
В состав системы входят:
1. комплекс наземных станций, подсистема контроля и управления – КИК (контрольно-изм-компл) ;
2. группа (созвездие) спутников НКА;
бортовое оборудование объектов навигации.
Спутники оборудованы:
радиоаппаратурой,
вычислительными средствами,
аккумуляторными батареями, заряжаемыми от солнечных элементов. Периодическая связь с наземными станциями обеспечивает уточнение траекторий, ориентации и отсчетов времени на спутниках.
 |
Вводимая в бортовые ЭВМ информация, в том числе о гравитационном поле Земли, влияющем на координаты спутника, позволяет систематически передавать на объекты навигации эфемеридную информацию
координаты и составляющие скоростей движения спутников, рассчитанные для определенного момента времени
Функционирование СРНС осуществляют с использованием практически когерентного излучения (немодулированного или сложномодулированного).
Спутниковые РНС основаны на использовании координированной по движению и излучению сигналов сети навигационных искусственных спутников Земли (НИСЗ). Для работы СРНС выделены частоты в диапазоне дециметровых волн, близкие к оптимальным с точки зрения минимального поглощения сигнала при распространении и размеров антенн, используемых для передачи и приема. Функции опорных станций в СРНС выполняют НИСЗ.
Возможны как активные с активным ответом, так и пассивные СРНС.
Большинство СРНС представляют собой многопозиционные пассивные системы, имеющие неограниченную пропускную способность.
Из возможных методов местоопределения в СРНС наиболее употребителен дальномерный метод. Измерения в дальномерной (квазидальномерной) системе описываются уравнениями для дальномерной системы:
 (10.1)
(10.1)
и для квазидальномерной системы
 , (10.2)
, (10.2)
| где | xi, yi, zi | – | известные координаты РНТ; |
| x, y, z | – | искомые координаты объекта; | |
| с | – | скорость распространения электромагнитной волны; | |
| DТ | – | расхождение временных шкал навигационной системы и аппаратуры потребителя. |
Уравнения (10.1) и (10.2) справедливы при точной синхронизации шкал времени на всех НИСЗ. В дальномерной системе погрешность шкалы времени НИСЗ входит в погрешность измерений. Для того чтобы эта погрешность не сказывалась на точности системы и не превышала, например, 0,3 м, расхождение шкал времени не должно быть больше 1 нс. Если принять, что каждый НИСЗ синхронизируется один раз за 12 ч, то для хранения времени на борту НИСЗ требуются генераторы со стабильностью около 10–14. При использовании атомных генераторов с такой стабильностью СРНС является дополнительно источником точного времени.
Из (10.1) и (10.2) следует необходимость знания координат НИСЗ (т.е. xi, yi, zi ), соответствующих моменту проведения измерений. В наиболее распространенных СРНС каждый из НИСЗ вместе с навигационным сигналом передает свои эфемериды. Эфемериды определяют на наземных станциях слежения за спутниками и периодически транслируют на НИСЗ, где они запоминаются для последующего включения в сигнал спутника. В аппаратуре потребителя эфемериды пересчитываются на момент измерения и по ним находятся значения хi,yi, zi спутника. Так как для определения местоположения потребителя необходимо несколько НИСЗ, то со спутника транслируется также так называемый альманах, содержащий эфемериды всех НИСЗ системы. Альманах служит для выбора спутника.
Дата добавления: 2019-12-09; просмотров: 1102;
Поиск по сайту
Узнать еще
- II этап. Установка свойств объектов
- VIII Места занятий, оборудование и спортивный инвентарь
- Аварийно-спасательное оборудование
- Автодромы, оборудование автодромов
- Аквариум и его оборудование
- Акустическое воздействие объектов на окружающую среду
- Анализ основного силового оборудование электрических цепей
- Аппаратура и оборудование высокочастотных трактов радиоцентров ОВЧ-диапазона

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
