Канал связи – совокупность технических средств для независимой передачи информации от источника к получателю.
Проводные воздушные линии связи – провода без каких-либо изолирующих или экранирующих оплеток, проложенные между столбами и висящие в воздухе.
Полоса пропускания линии связи – это непрерывный диапазон частот, для которого отношение амплитуды выходного сигнала к амплитуде входного превышает некоторый заранее заданный предел.
Затухание – уменьшение амплитуды и мощности сигнала при его передаче по линии связи.
Помехоустойчивость линии связи – это её способность уменьшать воздействие помех, создаваемых во внешней среде, на передаваемый полезный сигнал.
Первичные параметры проводных линий связи – погонные активное сопротивление проводов R (Ом/км), индуктивность L (Гн/км), емкость С (Ф/км) и проводимость изоляции проводов G (Сим/км).
Однородная проводная линия связи – линия, у которой величины первичных параметров постоянны по длине.
Вторичные параметры проводных линий связи –волновое сопротивление Zв и постоянная передачи g.
Волновое сопротивление – это такое сопротивление, которым можно заменить часть проводной линии, при этом в оставшейся части распределение токов и напряжений не изменится.
Режим согласованной передачи проводных линий связи – это передача электромагнитной энергии без отражений в условиях равенства величины сопротивления нагрузки величине волнового сопротивления линии.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Дайте определение линии связи.
2. Дайте определение канала связи.
3. Дайте определение проводной линии связи.
4. Дайте определение затуханию проводной линии связи.
5. Назовите и дайте определение первичных параметров проводных линий связи.
6. Назовите и дайте определение вторичных параметров проводных линий связи.
7. Дайте определение однородной проводной линии связи.
8. Дайте определение режиму согласованной передачи проводной линии связи.
7. ПОМЕХОУСТОЙЧИВОСТЬ СИСТЕМ ТЕЛЕМЕХАНИКИ
7.1. ПОМЕХИ И ИХ ХАРАКТЕРИСТИКИ
Помехи – случайные воздействия, искажающие передаваемый сигнал. Если помеха не случайная, а регулярная, например, передача радиостанции, то от нее можно избавиться с помощью соответствующих полосовых фильтров.
Типы помех. Воздействие помехи на сигнал может быть двояким. Если помеха ξ(t) складывается с сигналом s(t) и на вход приемника поступает их сумма
x(t)=ξ(t) + s(t),(7.1)
то такую помеху называют аддитивной.
Если результирующий сигнал равен произведению помехи и передаваемого сигнала
x(t)=ξ(t)*s(t),(7.2)
то эту помеху называют мультипликативной.
Мультипликативные помехи вызываются рядом причин, основными из которых являются изменение характеристик линий связи, коэффициентов усиления схем при колебаниях напряжений питания, замирания сигналов в радиосвязи.
Поскольку подавляющее большинство сообщений в промышленной телемеханике передается по проводным линиям связи, которые являются линейными электрическими цепями, при воздействии помех на эти цепи мультипликативные помехи не возникают. Воздействие помех на передаваемый сигнал имеет аддитивный характер. Поэтому в дальнейшем будем рассматривать только аддитивные помехи. Их классификация представлена на рис. 7.1 [8].
По форме аддитивные помехи можно разделить на сосредоточенные во времени или импульсные (рис. 7.2, а), флуктуационные или гладкие (рис. 7.2, б) и гармонические или сосредоточенные по частоте (рис. 7.2, в).
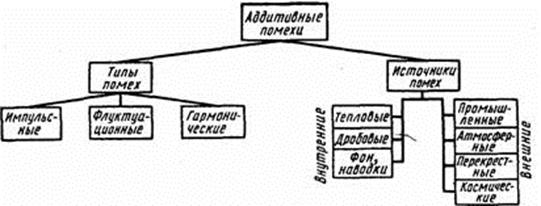
Рис. 7.1. Классификация аддитивных помех и их источников

Рис. 7.2. Типы аддитивных помех
Импульсные помехи (рис. 7.2, а) следуют друг за другом относительно редко, т.е. через такие промежутки времени, при которых нестационарные процессы в приемнике от одной импульсной помехи успевают закончиться до появления следующей импульсной помехи. В общем случае импульсные помехи представляют собой последовательность импульсов со случайными амплитудой, длительностью и моментами появления отдельных импульсов.
Флуктуационные или гладкие помехи характеризуются тем, что в них отсутствуют большие резкие колебания. Амплитуда флуктуационных помех на выходе приемного устройства пропорциональна корню квадратному полосы пропускания устройств, а мощность – полосе пропускания. При импульсных помехах мощность и амплитуда помехи пропорциональны полосе пропускания.
Таким образом, при уменьшении полосы пропускания приёмного устройства в четыре раза эффективное напряжение флуктуационных помех уменьшается в два раза, а импульсных – в четыре раза. При этом мощность флуктуационных и импульсных помех уменьшается одинаково, т.е. в четыре раза.
Это показывает, что на характер помех на выходе приемного устройства существенное влияние оказывает полоса пропускания приемника. При одних и тех же помехах в линии связи на выходе узкополосного приемника помехи могут иметь флуктуационный характер, а широкополосного – импульсный.
Энергетический спектр помехи характеризует распределение ее по мощности в диапазоне частот. Так, помехи типа «белый шум» обладают равномерным спектром, спектральная плотность которого не зависит от частоты в пределах полосы частот канала. При равномерном энергетическом спектре вводят понятие удельной мощности помехи, отнесенной к полосе в 1 Гц.
Источники помех. Источниками помех являются внешние воздействия и внутренние шумы, возникающие в цепях и аппаратуре (см. рис. 7.1).
К внутренним шумам относятся тепловые шумы, возникающие из-за беспорядочного движения свободных электронов в проводах и резисторах и шумы, обусловленные дробовым эффектом в электронных лампах и полупроводниковых приборах. В результате дробового эффекта ток не является постоянным и флуктуирует относительно среднего значения.
Внутренние шумы существуют всегда и являются источниками флуктуационных помех, которые поэтому принципиально неустранимы, можно лишь как-то ограничивать их. Флуктуационные помехи также создаются в местах соединения отдельных участков цепи за счет термоэффекта и гальванического взаимодействия.
Наибольшее влияние на канал связи оказывают внешние помехи, главнейшими из которых являются промышленные (искусственные) и атмосферные (естественные) помехи.
Промышленные помехи создаются различными устройствами: электрическим транспортом, электросваркой, системами зажигания автомобилей, медицинским электрооборудованием и др. Основной причиной этих помех является искрообразование, связанное с резким прерыванием тока в электрических цепях в процессе их коммутации. Помехи создаются также линиями электропередачи, которые при отсутствии экранирования являются своего рода антеннами. Промышленные помехи могут носить флуктуационный или импульсный характер; они проникают в телемеханические устройства через антенну, цепи питания, емкостные и индуктивные связи. На воздушные линии связи помехи наводятся от линий высокого напряжения. Источниками помех являются и устройства заземления металлических оболочек кабелей, напряжение в которых возникает от блуждающих токов заземления, когда в качестве обратного провода используется «земля».
Атмосферные помехи обусловлены перемещением электрических зарядов в атмосфере. Молнии создают токовые разряды в десятки тысяч ампер, и помехи от них носят импульсный характер. Однако если количество грозовых разрядов в единицу времени велико и приемное устройство реагирует на достаточно дальние разряды, помехи на выходе узкополосного приемника могут иметь флуктуационный характер.
Основная энергия промышленных и атмосферных помех заключена в низкочастотном диапазоне волн. С увеличением частоты уровень этих помех падает.
Следует отметить еще один тип помех, которые имеются только в многоканальных устройствах телемеханики – так называемые перекрестные помехи. При изменении сигналов в соседних каналах многоканальной системы с частотным разделением сигналов могут появляться в виде помех сигналы, вызванные переходными искажениями. Причиной их появления служат реальные характеристики полосовых фильтров, которые вследствие неполного подавления соседних частот или дрейфов характеристик пропускают колебания, которые должны подавлять. Если число каналов достаточно велико, а изменения сигналов в различных каналах независимы, то перекрестные помехи будут по своему характеру приближаться к флуктуационным. Для уменьшения таких перекрёстных помех вводятся защитные частотные интервалы.
Аналогичное взаимное влияние наблюдается и в системах с временным разделением сигналов. В таких системах перекрестные помехи возникают из-за относительно большой длительности переходных процессов. Переходные процессы в электрических цепях приемника от предыдущих сигналов накладываются на последующие сигналы и вызывают их искажение. Для уменьшения перекрёстных помех в таких системах вводятся защитные временные интервалы.
Интенсивность и характер помех зависят от типа линии связи, диапазона частот и условий передачи. Сильные помехи наводятся в воздушной линии связи, которая, как антенна, улавливает помехи, создаваемые грозовыми разрядами, промышленными установками, радиостанциями, высоковольтными линиями электропередачи и т.п.
Такого же рода помехи и от тех же источников могут быть при передаче по радиоканалу. Кроме того, здесь возникают искажения сигнала от затухания радиоволн и многократных отражений сигналов. Кабельные линии связи хорошо экранированы и внешние помехи в них практически не возникают.
7.2. ИСКАЖЕНИЕ СИГНАЛОВ ПОД ДЕЙСТВИЕМ ПОМЕХ
Под действием помех происходит искажение полезных сигналов, снижается достоверность принимаемой информации [8].
Достоверностью называется степень соответствия принятой информации переданной. Оценкой достоверности служит вероятность правильного приема, равная отношению числа правильно принятых символов сообщения (знаков, цифр, элементов) к общему числу переданных символов при достаточно большом числе передаваемых сообщений. Обычно такое отношение подсчитывают за определенный промежуток времени. Иногда пользуются понятием потери достоверности, которую оценивают частотностью ошибок:
hош=nош/nобщ , (7.3)
где nош – число ошибочных сообщений;
nобщ – число переданных сообщений.
Несоответствие между принятой и переданной информацией может быть вызвано искажениями, возникающими вследствие следующих факторов:
1) погрешности преобразования передаваемого сообщения в сигнал при технической реализации соответствующего устройства;
2) несовершенства методов передачи и приема сигналов и технической их реализации;
3) несовершенства методов преобразования принимаемого сигнала в сообщение и технической их реализации;
4) особенностей распространения сигнала по линии связи;
5) недостаточной помехозащищенности сигнала.
Все эти причины приводят к трем видам искажений передаваемых сигналов: линейным, нелинейным и случайным.
Линейные искажения – искажения сигнала, не сопровождающиеся появлением частотных составляющих в его спектре. Линейные искажения подразделяют на частотные (амплитудно-частотные) и фазовые.
Частотные искажения вызываются неравномерным воспроизведением амплитуд отдельных гармонических составляющих сигнала при его прохождении через электрическую цепь. Они возникают из-за наличия в цепях сосредоточенных и распределенных реактивностей, общее сопротивление которых зависит от частоты. Так, электромагнитная энергия высоких частот при распространении по линии связи затухает больше, чем электромагнитная энергия низких частот.
На рис. 7.3, а показано воспроизведение импульса прямоугольной формы тремя гармониками (1, 3 и 5-й) и постоянной составляющей. Амплитудно-частотные искажения изменяют амплитуду импульса и несколько искажают его форму (рис. 7.3, б).
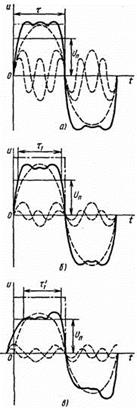
Рис. 7.3. Передача импульса прямоугольной формы:
а – без искажений; б – с амплитудными искажениями;
в – с амплитудными и фазовыми искажениями

Рис. 7.4. Виды искажений импульсов:
а – передаваемый импульс; б, в – краевые искажения;
г, д – искажения преобладания; е – дробление импульсов
Фазовые искажения вызываются неодинаковым относительным сдвигом во времени отдельных гармонических составляющих сигнала при его прохождении через электрическую цепь. Причина их возникновения – конечная скорость распространения энергии по линии передачи. Неравномерно также затухание составляющих спектра сигнала.
Следствием этого являются сдвиг начала импульса и искажение его формы (рис. 7.4, а). А так как приемное устройство срабатывает при некотором пороговом значении Un, меньшем амплитуды импульса, следствием линейных искажений является также уменьшение длительности импульса (t не равно t1 и t1', см. рис. 7.3).
К линейным искажениям следует отнести и искажения из-за ограничения полосы пропускания.
Нелинейные искажения – искажения сигнала, сопровождающиеся появлением в его спектре новых гармонических составляющих. Они возникают из-за наличия нелинейных сопротивлений в аппаратуре телемеханики и связи. Эти искажения также изменяют форму сигнала.
Случайные искажения вызываются помехами в канале и аппаратуре связи. Помехи могут вызвать подавление сигнала или создавать ложный сигнал.
В результате искажений, если сигнал окажется неполностью подавленным, может возникнуть изменение его длительности, формы либо амплитуды или фазы (месторасположения). В видеоимпульсах изменения приводят к так называемым краевым искажениям и дроблениям.
Краевые искажения выражаются в искажении формы импульса, что приводит к изменению его месторасположения. Переданный импульс (рис. 7.4, а), будучи искаженным при передаче (рис. 7.4, б), восстанавливается по форме на приеме, например путем подачи его на триггер. Однако после восстановления остается сдвиг переднего фронта импульса (края, отсюда название «краевые искажения») на t1 (рис. 7.4, в).
Краевые искажения подразделяются на искажения преобладания, характеристические искажения и смещения фронтов импульсов.
Искажения преобладания – вид искажений, при которых импульсы одной полярности удлиняются за счет укорочения импульсов другой полярности. Если передаются импульсы и паузы (рис. 7.4, г), то преобладания выражаются в том, что импульсы имеют большую (или меньшую) длительность по сравнению с паузой (рис. 7.4, д).
Характеристические искажения проявляются в виде выбросов, обусловленных характером переходного процесса, искажений формы импульсов и смещений их фронтов под воздействием переходного процесса от предыдущей посылки, который не успевает закончиться. Характеристические искажения зависят от длительности импульсов, характера их последовательности (отсюда название «характеристические»), а также формы амплитудно-частотной и фазовой характеристик канала связи.
Смещения фронтов импульсов, возникающие под воздействием случайных помех, аналогичны краевым искажениям.
Кроме краевых имеются и другие искажения видео- и радиоимпульсов.
Дробления выражаются в дроблении импульса и изменении его полярности как на части, так и на всей длительности импульса. На рис. 7.4, е приведен один из возможных вариантов дробления импульсов.
Искажения по соседнему каналу (переходные искажения), вызываемые влиянием смежных каналов, обусловливаются тем, что реальные фильтры в отличие от идеальных не обладают характеристиками, позволяющими полностью отфильтровывать одну полосу частот от другой. Поэтому сигналы, передаваемые по одному вполне определенному каналу, могут попасть в соседние каналы.
Перекрестные искажения возникают при одновременной передаче информации от многих источников в различных частотных диапазонах вследствие нелинейности ряда общих для всех каналов элементов и узлов устройства (усилители, демодуляторы и т.п.).
7.3. ТЕОРИЯ ПОТЕНЦИАЛЬНОЙ ПОМЕХОУСТОЙЧИВОСТИ
В.А. КОТЕЛЬНИКОВА
Помехоустойчивостью называют способность системы правильно принимать информацию несмотря на воздействие помех.
Теория помехоустойчивости элементарного сигнала при флуктуационных помехах разработана В.А. Котельниковым и развита рядом других ученых.
Под элементарным сигналом понимают любой сигнал, который может принимать значения максимума, что соответствует символу 1, или минимума, что соответствует символу 0. Таким элементарным сигналом может быть видео- или радиоимпульс.
Трансформация сигналов. Трансформация телемеханического сообщения – необнаруженное изменение телемеханического сообщения, возникшее в процессе передачи под воздействием помех и приводящее к приему ложного сигнала (ГОСТ 26.005-82). Элементарный сигнал может передавать дискретные сообщения типа команд. Во многих промышленных системах телемеханики, выполняющих функции ТУ-ТС, передача одного видео- или радиоимпульса означает передачу одной команды или одного сигнала телесигнализации.
Если команда, соответствующая сигналу 1, подавлена помехой, то это означает, что сигнал 1 трансформировался (перешёл) в сигнал 0. Вероятность подавления команды или сигнала телесигнализации обозначают Р10 (вероятность трансформации 1 в 0). Вероятность ложной команды или ложного сигнала телесигнализации возможна, если помеха возникает при отсутствии сигнала, т.е. когда посланный сигнал 0 трансформируется в сигнал 1 (P01).
Таким образом, при передаче элементарного сигнала 1 или 0 возможны два результата передачи:
а) правильная передача: при этом 1 переходит в 1, т.е. 1 ®1, а 0 – в 0, т.е. 0®0, обозначим Р(1®1) = Р11 и Р(0®0) = Р00;
б) неправильная передача: при этом 1 переходит в 0, т.е. 1®0, а 0 – в 1, т.е. 0®1, обозначим Р(1®0)=Р10 и P(0®l)=P01.
Рассмотрим помехоустойчивость передачи элементарного сигнала при флуктуационных помехах. Наиболее высокой помехоустойчивостью обладает идеальный приемник В.А. Котельникова, который обеспечивает при данном способе передачи наилучшую помехоустойчивость, называемую потенциальной.
Потенциальная помехоустойчивость – предельно допустимая помехоустойчивость, которая может быть обеспечена идеальным приемником.
Идея построения идеального приемника заключается в следующем. Зная, какие сигналы должны быть переданы, например A1(t) и A2(t), и имея их образцы, создаваемые генераторами (рис. 7.5), сравнивают полученные сигналы по очереди с этими образцами и, вычисляя энергию разности принятого сигнала и образца этих сигналов, относят принятый сигнал к тому образцовому сигналу, для которого эта разность минимальна.
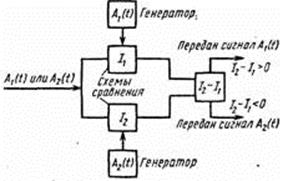
Рис. 7.5. Принцип построения идеального приемника В.А. Котельникова
Например, передаются два сигнала одинаковой длительности, но первый с большей, а второй с меньшей амплитудой. У идеального приемника тоже есть два таких сигнала, однако неизвестно, какой сигнал послан. Пришедший сигнал искажен помехами, но после сравнения, если окажется, что он ближе подходит к большему сигналу, считают, что был послан именно первый сигнал.
Это сравнение сигналов заключается в определении энергии разности между принятым сигналом x(t) и каждым из образцов передаваемых сигналов. Если, например, переданы сигналы A1(t) и A2(t) длительностью τ каждый, то на приемной стороне необходимо вычислить интегралы:
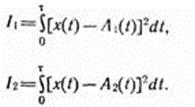 (7.4)
(7.4)
Сигналы A1(t) и A2(t) должны быть заранее известны на приемной стороне. Считают, что был передан тот сигнал, для которого значение Ii минимально, i=1,2. Если I2 – I1>0, то считают принятым сигнал A1, если I2 – I1<0, то сигнал A2. В тех случаях, когда опасность принять сигнал A1 вместо А2 и наоборот неодинакова, идеальный приемник должен сравнивать разность I2 – I1 не с нулем, а с некоторой величиной b. Если
I2 – I1>b, то считают принятым сигнал A2, если I2 – I1<b, то сигнал А1. Изменением значения величины b можно регулировать соотношение вероятностей превращения одного сигнала в другой.
Вследствие того, что параметры помехи зависят от полосы пропускания приемника, вводят понятие удельной помехи
 (7.5)
(7.5)
где U п. ск – среднеквадратичное значение напряжения помехи;
DF – полоса пропускания приёмника.
При этом величина, характеризующая потенциальную помехоустойчивость, равна отношению энергии сигнала к значению удельной помехи:
 (7.6)
(7.6)
Помехоустойчивость идеального приемника рассчитывают по формулам Котельникова [8]:
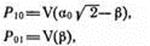 (7.7)
(7.7)
где V – символ, обозначающий вероятностный интеграл, величины которого приведены в таблице [8];
b = Uпор/Uп.ск. расчётный коэффициент;
Uпор – пороговое значение сигнала.
При симметричном канале, когда вероятности подавления команды и образования ложной команды одинаковы,
 (7.8)
(7.8)
Котельниковым В.А. создана методика и выполнены расчёты потенциальной помехоустойчивости для различных способов передачи при флуктуационных помехах.
7.4. ПОМЕХОУСТОЙЧИВОСТЬ РЕАЛЬНЫХ ПРИЁМНИКОВ
ТЕЛЕМЕХАНИЧЕСКИХ СИГНАЛОВ
Помехоустойчивость реальных приемников при их совершенствовании не может превышать идеального приёмника для данного способа передачи, но может быть очень близкой к нему.
Рассмотрим некоторые способы приёма сигналов и дадим оценку их помехоустойчивости.
Приемники можно подразделить на две группы: приемники видеоимпульсов (импульсов постоянного тока) и приемники радиоимпульсов (импульсов с высокочастотным заполнением).
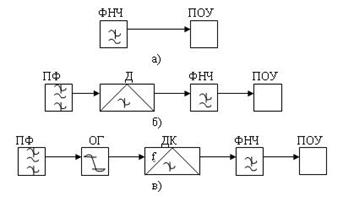
Рис. 7.6. Структурные схемы приемников:
а – видеоимпульсов; б – сигналов с амплитудной модуляцией;
в – сигналов с частотной модуляцией
Приемник видеоимпульсов. На рис. 7.6, а представлена структурная схема приемника видеоимпульсов, состоящего из фильтра нижних частот ФНЧ и порогового устройства ПОУ, под которым понимают какое-либо релейное устройство, срабатывающее при достижении сигналом определенного порогового уровня. Этот приемник просто реализовать, и в отношении помехоустойчивости он будет близок к идеальному приёмнику.
В этом приемнике видеоимпульсов оптимальной с точки зрения помехоустойчивости является полоса частот
опт DFфнч = 0,7/t, (7.9)
где t – длительность видеоимпульса.
Это объясняется тем, что помехоустойчивость зависит от соотношения напряжений сигнала U1и помехи Uп. В свою очередь, величина помехи пропорциональна корню квадратному из DF – полосы пропускания входного фильтра. Для уменьшения помехи следует уменьшить эту полосу пропускания, однако при малой величине полосы будет уменьшаться и напряжение полезного сигнала.
Приемники сигналов с амплитудной модуляцией. Структурная схема такого приемника показана на рис. 7.6, б. Приемник состоит из полосового фильтра ПФ, детектора Д, фильтра нижних частот ФНЧ и порогового устройства ПОУ. Оптимальная полоса высокочастотного входного полосового фильтра с двумя боковыми частотами
опт DFпф = l/t , (7.10)
а оптимальная полоса пропускания фильтра нижних частот
опт DFфнч = 0,7/t , (7.11)
где t – длительность импульса.
В медленно действующих системах телемеханики, когда длительность импульса имеет порядок единиц и десятков миллисекунд, реализация оптимальной полосы входного фильтра вызывает затруднение. Из-за нестабильности несущей частоты зачастую приходится значительно расширять полосу входного фильтра, что приводит к существенному ухудшению помехоустойчивости вследствие того, что нелинейный элемент – детектор – ухудшает отношение сигнал/помеха на входе фильтра нижних частот.
Например, при передаче импульсов длительностью t = 100 мс требуется полоса DFпф = l/t = 10 Гц. Если несущая частота равна 10000 Гц, то при стабильности генератора ±1% изменение несущей частоты будет в пределах 9900 ÷ 10100 Гц. Если полосовой фильтр будет пропускать частоты 10000 ÷ 10010 Гц, то при уходе частоты генератора за пределы полосы пропускания фильтра сигнал вообще не будет принят.
Приемники сигналов с частотной модуляцией. Структурная схема такого приемника приведена на рис. 7.6, в. К выходу частотного дискриминатора ДК подключен фильтр, за которым включено пороговое устройство, фиксирующее команду.
Полоса пропускания входного усилителя определяется практически нестабильностью несущей и технической реализуемостью фильтра. Наличие ограничителя ОГ перед дискриминатором и узкополосного фильтра после дискриминатора позволяет передавать сигналы при отношении сигнал/помеха меньше единицы в полосе входного фильтра.
Помехоустойчивость является одной из важнейших характеристик систем телемеханики. Её показателями служат требования к достоверности передачи различных типов информации телемеханических систем, представленные в табл. 7.1.
Таблица 7.1
Требования к достоверности контрольной и управляющей информации
согласно ГОСТ 26.205-83
| Вероятностные характеристики | Вероятность события Р, не более | ||
| Категории систем | |||
| Вероятность трансформации команды ТУ | 10 
| 10 
| 10 
|
| Вероятность трансформации сообщений ТС и ТИ | 10 
| 10 
| 10 
|
| Вероятность трансформации знака буквенно-цифровой информации или отсчёта кодового ТИ | 10
| 10
| 10 
|
| Вероятность отказа от исполнения посланной команды (с повторением передачи до пяти раз) | 10
| 10
| 10
|
| Вероятность потери контрольной информации при спорадической передаче (с повторениемпередачи до пяти раз) | 10
| 10
| 10
|
| Вероятность потери команды | 10
| 10
| 10
|
| Вероятность образования ложной команды или контрольного сообщения | 10 
| 10
| 10 
|
По величине показателя достоверности, которым служит вероятность искажения различных типов сообщений, системы телемеханики разделяются на три категории, причём наибольшие требования предъявляются к телемеханическим системам первой категории, наименьшие – к системам третьей категории.
Характеристики табл. 7.1 используются при проектировании телемеханических систем.
7.5. ПОМЕХОУСТОЙЧИВОСТЬ ПЕРЕДАЧИ КОДОВЫХ КОМБИНАЦИЙ ПРИ НЕЗАВИСИМЫХ ОШИБКАХ
Расчет помехоустойчивости передачи различных кодовых комбинаций является большой и самостоятельной темой. Рассмотрим лишь расчет трансформаций, т.е. перехода одной кодовой комбинации в другую [6].
Расчет вероятности трансформаций для несимметричного канала с независимыми ошибками. В этом случае при расчетах можно придерживаться положений, вытекающих из теорем теории вероятностей.
Теорема первая. Если в двоичном канале заданы вероятности двух переходов, то вероятности двух других переходов могут быть найдены на основе теоремы о полной группе событий;
Теорема вторая. Вероятность того, что одна кодовая комбинация перейдет в другую, равна произведению вероятностей переходов ошибок каждого символа.
Например, передана комбинация 11011. Вероятность того, что под воздействием помех эта комбинация исказится и вместо нее будет принята, например, комбинация 10101, рассчитывают таким образом. В старшем (пятом) и в первом (младшем) разрядах единицы приняты правильно: (1®1) и (1®1). В четвертом и во втором разрядах единицы подавлены помехами и трансформировались в нули, т.е. 1®0 и 1®0. В третьем разряде 0 перешёл в 1, т.е. 0®1. В результате получаем вероятность перехода комбинации 11011 в комбинацию 10101:
Р (11011®10101) = P11P10P01P10P11.
Если необходимо находить вероятности возникновения обнаруженных и необнаруженных ошибок или нескольких ошибок при передаче сообщения, то пользуются указанными теоремами.
Пример 7.1
Найти вероятность возникновения обнаруженных и необнаруженных ошибок в коде с постоянным весом С1з для следующих численных значений: р10= 10-3, P01=10-4.
Код С1з состоит из трех комбинаций: 100, 010 и 001. Это так называемые разрешенные комбинации, поскольку в каждой из них имеется по одной единице. Так как код может обнаруживать только одну ошибку, то комбинации, отличающиеся от разрешённых числом единиц, легко обнаруживаются, т.е. составляют обнаруженные ошибки.
Если же, например, вместо переданной комбинации 100 будет принята комбинация 001, то это означает, что возникла необнаруженная ошибка, когда в принятой комбинации содержится одна единица, но в другом разряде. Полная группа событий при передаче кодовой комбинации 100 представлена на рис. 7.7.
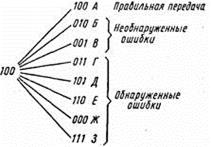
Рис. 7.7. Полная группа событий
при передаче кодовой комбинации 100
Определим вероятности различных событий.
Вероятность события Б:
P(Б)=P(100→010)=P(1→0)P(0→1)P(0→0),
а так как р00=1-P01, то P(Б)=р10P01(1-P01).
Вероятность события В:
P(В)=P(100→001)=р10P00P01=р10P01(1-P01).
Таким образом, вероятность возникновения необнаруженной ошибки:
Pн.ош = P(Б)+P(В)=2р10P01(1-P01).
Вероятность возникновения обнаруженной ошибки равна вероятности перехода в одну из запрещенных кодовых комбинаций:
Pо.ош=P(Г)+P(Д)+P(Е)+P(Ж)+P(З).
При этом вероятность возникновения каждого из событий определится следующими соотношениями:
P(Г)=р10P01P01=р10P201;
P(Д)=р11P00P01=р01(1-P01)(1-P10);
P(Е)=р11P01P00=р01(1-P01)(1-P10);
P(Ж)=р10P00P00=р10(1-P01)2;
P(З)=р11P01P01=р201(1-P10).
В итоге получим
Pо.ош=р10P201+2р01(1-P01)(1-P10)+р10(1-P01)2+р201(1-P10).
Подставляя значения вероятностей Р10 и Р01, найдем
Pо.ош=1,2*10-3 и Pн.ош=10-7.
Из примера вытекает, что вероятность возникновения необнаруженной ошибки значительно меньше вероятности возникновения обнаруженной ошибки.
Ошибка всегда обнаруживается, если кодовая комбинация содержит единиц больше или меньше, чем одна, хотя в некоторых случаях обнаруженные ошибки образуются при искажении одного (переход 100 в 101), двух (переход 100 в 111) или трех символов (переход 100 в 01l). В то же время для возникновения необнаруженной ошибки всегда должны исказиться два символа.
Если аналогичные расчеты проделать для другой комбинации кода С1з, то получится тот же результат.
Пример 7.2
Найти вероятности возникновения двух или трех ошибок при передаче кодовой комбинации 1111. Дано: Р10=10-3; Р01=10-4.
При двух ошибках возможно С = 6 типов искажений:
А – 1001; Б – 1100; В – 0110; Г – 0011; Д – 1010; Е – 0101.
Вероятность искажения типа А:
P(А)=р11P10P10р11=р210(1-P10)2.
Аналогично можно рассчитать вероятности и всех остальных переходов. В результате получим
P(2)=6р210(1-P10)2=6*10-6(1-10-3)2≈6*10-6.
При трех ошибках возможно C=4 типа искажений:
А – 1000; Б – 0100; В – 0010; Г – 0001.
Вероятность искажения типа А:
P(А) = P11Р10Р10Р10 = P310.(1-P10).
Аналогично находим вероятность события «З»
P(З)=4р310(1-P10)=4*10-9(1-10-3)≈4*10-9.
Таким образом, вероятность возникновения трёх ошибок существенно меньше вероятности возникновения двух ошибок.
Расчет вероятности трансформаций для симметричного канала с независимыми ошибками. Так как симметричный канал, в котором P10=P01, является частным случаем несимметричного канала, принципиально расчет трансформаций для симметричного канала можно производить так же, как и для несимметричного.
Однако для симметричного канала имеются более простые методы расчета трансформации. Вводят понятие вектора ошибки и определяют вероятность его возникновения.
Например, переданная комбинация 10101 была искажена и принята как 01110. Складывая обе комбинации по модулю 2, получаем вектор ошибки 11011. Отсутствию ошибок соответствует вектор ошибки, состоящий из одних нулей. Вероятность возникновения такого вектора равна вероятности правильного приема
Pправ=P(000...0)=(1-P1)n.
Здесь Р1 – вероятность ошибочного приема одного символа, так как P10=P01; n – разрядность кода.
Вероятность того, что в i-том разряде возникла ошибка, а все остальные символы приняты правильно – P1(1-P1)n-1.
Такая ошибка может возникнуть в любом из п символов. В итоге возникнет п различных векторов с одной единицей, т.е. можно записать, что число таких векторов будет равно C1n. Вероятность возникновения любого вектора с одной единицей равна сумме вероятностей возникновения всех этих векторов:
P(1)=C1nP1(1-P1)n-1.
При nP1 ≤ 1, разлагая в ряд выражение для Р(1) и отбрасывая члены с Р21, получаем P(1)»nP1. По аналогии можно найти вероятность возникновения двух ошибок:
P(2)=C2nP21(1-P1)n-2,
и в общем случае вероятность возникновения k ошибок (k<n).
P(k) = CknPk1(l-Pl)n-k. (7.12)
Выражение (7.12) носит название формулы Бернулли.
Пример 7.3
Определить вероятность возникновения одной, двух, трех ошибок в простом двоичном коде с n=5 при передаче по симметричному каналу с Р= 10-3:
P(1)=C15P1(1-P1)4=5*10-3(1-10-3)4≈5*10-3;
P(2)=C25P21(1-P1)3=10*10-6(1-10-3)2≈10*10-6;
P(3)=C35P31(1-P1)2=10*10-9(1-10-3)2≈10*10-9.
Если произвести такой расчет для n = 6, то ок
Дата добавления: 2021-11-16; просмотров: 563;
Поиск по сайту
Узнать еще
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- API как средство интеграции приложений.
- I тип реакций. Реакции, характерные для органических кислот.
- I. 5. Тесты для контроля знаний раздела I
- II Классификация САSЕ-средств
- II раздел. Организация работы логопеда в группе для детей с ОНР
- II. Затраты (времени, физических сил, финансовых средств и т.д.)
- II. Механические передачи

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
