Число степеней свободы (подвижность) механизмов
Поскольку механизм — кинематическая цепь, то при его исследовании возникает вопрос о числе степеней свободы, т. е. о числе ведущих звеньев, движением которых следует задаться, чтобы движение остальных звеньев относительно стойки было вполне определенным.
Известно, что если положение звеньев механизма определяется заданием W обобщенных (независимых) координат, то такой механизм обладает W степенями свободы. Следовательно, число обобщенных координат механизма W определяет число его ведущих звеньев. Определим это число.
Если бы все п+1 звеньев пространственного механизма были подвижными и не связанными друг с другом кинематическими парами, их общее число степеней свободы было бы W = 6 (п + 1). Но все звенья составляют кинематическую цепь, пары которой накладывают на относительное движение звеньев определенное число связей (таблица 1.1). При наличии в пространственной цепи кинематических пар всех пяти классов,
5
общее число связей будет т = Σ k pk, а с учетом того, что на
k =1
одно звено (стойку) наложено шесть связей, число степеней свободы механизма будет (формула Малышева):
5
W = 6n-Σ kρk = 6n- 5p5- 4p4 - Зp3 + 2p2 - p1, (1.1)
k =1
где п - число подвижных звеньев механизма.
В плоских механизмах на каждое подвижное звено наложено три общих условия связи, не позволяющих реализовать степени свободы пар III, II и I классов, поэтому формула (1.1) принимает вид (формула Чебышева):
W = 3n — 2n5 —p4. (1.2)
Все механизмы, удовлетворяющие условию (1.1), относятся к нулевому семейству, а условию (1.2) - к третьему.
В машинах и приборах встречаются плоские механизмы, действительное число степеней свободы которых не удовлетворяет условию (1.2). Это является следствием наличия лишних связей, введенных в механизм по различным причинам. В механизме шарнирного параллелограмма с одной степенью свободы (рисунок 1.9, б), например, такая связь появилась в результате шарнирного присоединения звена 4 к стойке О и шатуну 2 с целью повысить жесткость шатуна. «Лишнее» звено 4 и пары D и Е не изменили кинематики механизма, но отняли из расчетного числа W (формула 1.2) одну степень свободы. Связи, появляющиеся в механизмах в силу частных особенностей их структуры и не оказывающие влияния на кинематику механизма, называются пассивными.
1.1.4 Образование плоских механизмов
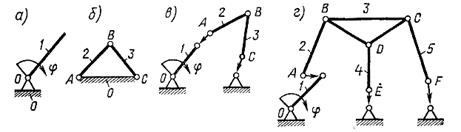
Из формулы (1.2) находим, что простейший механизм имеет два звена (рисунок 1.10, а), одно из которых (0) обращено в стойку, а второе (1), оставшееся подвижным, является и ведущим и ведомым. Образование более сложных, многозвенных механизмов с W = 1, в которых происходило бы преобразование движения ведущего звена t в движение ведомого звена п (в двухзвенном механизме такого преобразования нет), осуществляется подвижным присоединением к двухзвенному механизму так называемых структурных групп (одной или нескольких). Последние представляют собой
 | |||
|
кинематические цепи (звенья 2 и 3), присоединение которых свободными элементами звеньев к стойке 0 образует неподвижную (W = 0), статически определимую ферму ABC (рисунок 1.10, б), а присоединение к разным звеньям механизма (рисунок 1.10, б) не изменяет его подвижности.
Поскольку после присоединения к стойке группа теряет подвижность, то число ее звеньев п' и число низших одноподвижных пар p'5, считая и те, которые образовались в результате присоединения, должны удовлетворять условию:
Зп'- 2p'5 = 0. (1.3)
Таким образом, простейшая группа состоит из двух звеньев 2 и 3 (рисунок 1.10, в), соединенных в пару В, имеющих по одному свободному элементу А и С. Такие группы называются двухповодковыми или диадами, а механизмы, в состав которых кроме ведущего звена и стойки входят диады, относят к второму классу и называют диадными. По данному условию могут быть образованы и более сложные группы: трехповодковые, например состоящие из звеньев 2...5 (рисунок 1.10, г), и др.
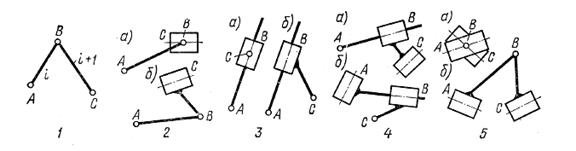
Ограничиваясь изучением диадных механизмов, получивших в технике широкое распространение, рассмотрим их образование с помощью пяти разновидностей диад (рисунок 1.11, 1...5), полученных из диады первой модификации путем замены в ней одной или двух вращательных пар поступательными. (На практике наиболее часто применяются модификации 1, 2а, 3а, 5а.)
В процессе образования четырехзвенных механизмов
 (рисунок 1.12, а...и) диады присоединяются свободными элементами звеньев А и С к ведущему звену 1 и стойке 0. Более сложные, многозвенные механизмы (рисунок 1.13, а, б) могут быть образованы аналогично, присоединением последующих диад к любым двум звеньям ранее полученного четырехзвенного механизма.
(рисунок 1.12, а...и) диады присоединяются свободными элементами звеньев А и С к ведущему звену 1 и стойке 0. Более сложные, многозвенные механизмы (рисунок 1.13, а, б) могут быть образованы аналогично, присоединением последующих диад к любым двум звеньям ранее полученного четырехзвенного механизма.
|
Обратим внимание на диаду, в которой все три пары являются поступательными (рисунок 1.14, а). Удовлетворяя условию (1.3) лишь формально, звенья этой группы после подвижного присоединения к стойке не теряют подвижности, а образуют плоский механизм с одной степенью свободы (рисунок 1.14, б). На звенья подобных механизмов наложено еще одно (четвертое) общее условие связи - их звенья лишены возможности вращаться вокруг осей, перпендикулярных плоскости движения, поэтому структурная формула таких механизмов имеет вид:
W = 2n-p5. (1.4)
 | |||
 |
Плоские механизмы, на звенья которых наложено четыре общих связи и подчиняющиеся условию (1.4), составляют четвертое семейство. К ним относятся трехзвенные механизмы клинового типа (рисунок 1.14, б) и механизмы с винтовой парой (рисунок 1.14, в). В винтовой паре независимым является только одно движение, поэтому ее относят к парам V класса (таблица 1.1, к).
Анализ механизмов
Поскольку любой по сложности плоский одноподвижный механизм с вращательными и поступательными парами образуется присоединением к двухзвенному механизму одной или нескольких групп, то может быть произведено разложение любого одноподвижного плоского механизма на двухзвенный механизм и структурные группы. Разложение механизмов на группы (структурный анализ) значительно упрощает решение задач силового анализа, облегчает выявление пассивных звеньев и позволяет определять класс механизма. Структурный анализ выполняется в такой последовательности. Определяется число степеней свободы. В механизме с одним ведущим звеном
(рисунок 1.10, а) это число равно единице. Если по формуле (1.2) получено W < 1, то в механизме имеются пассивные звенья - одно при W = 0 (рисунок 1.9, б), два при W = -1 и т. д. Перед анализом механизма эти звенья следует удалить. Сначала делается попытка отделить наиболее удаленную от ведущего звена диаду так, чтобы после этого остался механизм с тем же числом степеней свободы, что и заданный. Если диаду отделить не удается (число W оставшегося механизма не получается таким, как у заданного), то следует попытаться отделить трехповодковую или другую, более сложную группу. Разложение механизма с одной степенью свободы на группы ведется до тех пор, пока не останется одна пара - ведущее звено со стойкой (рисунок 1.10, а).
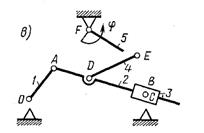
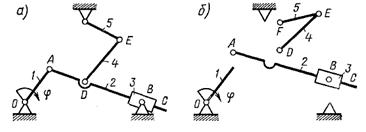
Согласно структурной классификации И. И. Артоболевского, класс механизма определяется наивысшим классом структурной группы. Однако следует иметь в виду, что с выбором другого ведущего звена, также входящего в пару V класса со стойкой, класс механизма может измениться. Если, например, в качестве ведущего звена механизма (рисунок 1.15, а) выбран кривошип 1, то от механизма могут быть отделены последовательно две диады: первой модификации (звенья 5 и 4) и третьей (звенья 2 и 3)
(рисунок 1.15, б). Если же за ведущее принять звено 5, то отделение диад окажется невозможным. В этом случае удается отделить только трехповодковую группу (звенья 1, 2, 3, 4, рисунок 1.15, в). Таким образом, в первом случае механизм будет отнесен к диадным, т. е. ко второму классу, а во втором случае - к третьему.
|
Дата добавления: 2021-11-16; просмотров: 646;
Поиск по сайту
Узнать еще
- B — число подмножеств, то частное а : b - это число элементов в каждом подмножестве.
- L-ОРБИТАЛЬНОЕ КВАНТОВОЕ ЧИСЛО
- Абсолютное число; 2 — показатель на 100 000 родившихся живыми.
- Академические свободы и автономия вуза
- Анализ приводов и систем числового управления станков
- АНГЛИЙСКАЯ КОНЦЕПЦИЯ СВОБОДЫ ПЕЧАТИ
- Архитектура сетевых механизмов обеспечения качества обслуживания в IP-ориентированных сетях.
- Б. Особенности нервного и гуморального механизмов регуляции функций организма.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
