Передаточные функции по управлению и возмущению
Пусть имеется некоторая САР, схема которой показана на рисунке.
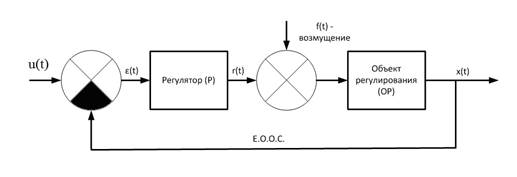
Для данной системы известно следующее:
1.  – функция рассогласования
– функция рассогласования
2. 
3. Описание регулятора 
Используя преобразование Лапласа (при нулевых Н.У.), получаем систему алгебраических уравнений
 (*)
(*)
Для решения данной системы дифференциальные уравнения, описывающие поведение САР, должны быть заданы. Порядок решения системы (*):
а) исключая из (*) R(s), E(s), разрешаем СУ относительно X(s)
 (**)
(**)
б) исключая из (*) R(s), X(s), разрешаем СУ относительно E(s)
 (***)
(***)
Разделим (**) и (***) на DB:
 (****)
(****)
где 
Первые выражения в (****) характеризуют собой эффект управляющего воздействия (на выходную величину и функцию рассогласования), а вторые – эффект возмущающего воздействия.
Обозначим  .
.
Рассмотрим частные случаи замкнутой САР:
1)  (нет помех)
(нет помех) 
 - передаточная функция замкнутой САР по управлению
- передаточная функция замкнутой САР по управлению
2)  (нет входного воздействия)
(нет входного воздействия) 
 - передаточная функция замкнутой САР по возмущению
- передаточная функция замкнутой САР по возмущению
3)  - передаточная функция ошибки по управлению
- передаточная функция ошибки по управлению
Рассмотрим разомкнутую САР. В (*) изменится только последнее уравнение:

Выход разомкнутой системы
Частные случаи разомкнутой САР:
1) (нет помех) 
 - передаточная функция разомкнутой САР по управлению
- передаточная функция разомкнутой САР по управлению
2) (нет входного воздействия) 
 - передаточная функция разомкнутой САР по возмущению
- передаточная функция разомкнутой САР по возмущению
1. Переходная функция (временная характеристика)
Переходная функция в отличие от передаточной является функцией вещественной переменной t. Выделяют два типа переходных функций:
а) переходная функция x(t) – отклик системы (звена, отдельного элемента) при подаче на вход ступенчатой функции H(t)
б) импульсная (весовая) переходная функция xи(t) или k(t) – отклик системы (звена, отдельного элемента) при подаче на вход импульсной функции δ(t)

Дата добавления: 2021-10-28; просмотров: 102;
Поиск по сайту
Узнать еще
- F06 Другие психические расстройства вследствие повреждения или дисфункции головного мозга, либо вследствие физической болезни
- I. 2. Функции крови
- I. 3. Функции минеральных веществ плазмы крови
- I. 4. Функции белков плазмы крови
- I. Кейнсианские функции потребления и сбережений.
- I. ФУНКЦИИ ЦЕНТРАЛЬНОГО БАНКА.
- III. Основные функции ГФС России
- III.1.3. ПРИЧИНЫ НАРУШЕНИЙ СЛУХА. ПСИХОЛОГО-ПЕДАГОГИЧЕСКАЯ КЛАССИФИКАЦИЯ НАРУШЕНИЙ СЛУХОВОЙ ФУНКЦИИ У ДЕТЕЙ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
